基于刚柔耦合多体动力学的叉车推出器分析
- 格式:pdf
- 大小:149.89 KB
- 文档页数:3
机械系统中的刚柔耦合动力学分析引言机械系统的刚柔耦合动力学分析是研究刚性部件和柔性部件耦合工作时的振动特性和动力学性能的过程。
刚柔耦合系统由刚性和柔性部件组成,其刚性部件具有高刚度和低振动特性,柔性部件则具有低刚度和高振动特性。
刚柔耦合分析在现代工程设计和制造中具有重要的作用,尤其是在飞行器、机器人、精密仪器等领域中的应用。
一、刚柔耦合动力学模型刚柔耦合动力学模型是描述该系统振动行为的数学模型。
该模型可以基于刚体动力学和弹性体动力学原理建立。
刚体动力学模型涉及质点、刚体的平移和旋转运动方程,弹性体动力学模型涉及刚体振动的波动方程和柔性部件的变形方程。
综合考虑刚体和弹性体的动力学模型,可建立刚柔耦合动力学模型,用于研究振动响应和动力学性能。
二、刚柔耦合系统的耦合方式刚柔耦合系统的耦合方式主要包括刚体与柔性部件的物理耦合和动力学耦合。
物理耦合是指刚体和柔性部件通过连接件(如螺栓、焊接等)实现的实体耦合,确保其共同工作。
动力学耦合是指刚体和柔性部件在振动过程中相互作用和影响。
物理耦合和动力学耦合的研究有助于理解刚柔耦合系统的振动特性和动力学行为,提高系统工作的稳定性和可靠性。
三、刚柔耦合系统的振动特性分析刚柔耦合系统的振动特性是研究该系统固有频率、模态形状和振型等振动性质的过程。
通过振动特性分析,可以确定系统的谐振频率和振型,为系统优化设计和振动控制提供依据。
常用的方法包括有限元分析、模态分析和振动测试等。
其中,有限元分析是一种基于数值计算的方法,可以模拟系统的振动响应,模态分析可以获得系统的固有频率和模态形状,振动测试可以直接测量系统的振动状态。
四、刚柔耦合系统的动力学性能分析刚柔耦合系统的动力学性能是研究该系统在外部激励作用下的响应和行为。
动力学性能分析主要包括动力学模态分析、频率响应分析和阻尼特性分析等。
动力学模态分析可以研究系统在特定工况下的振动行为和能量分布,频率响应分析可以研究系统在不同频率下的响应特性,阻尼特性分析可以研究系统的振动耗能和稳定性。
刚柔耦合并联机器人动力学建模及仿真研究1.前言刚柔耦合并联机器人是一种新型的机器人技术,其特点是结合了刚体机器人和柔性机器人的优点,在运动控制、机械刚度、操作灵活性等方面具有很大的优势。
本文旨在通过对刚柔耦合并联机器人的动力学建模及仿真进行研究,探索其在机器人领域的应用前景。
2.刚柔耦合并联机器人的概念和特点刚柔耦合并联机器人是指将刚体机器人和柔性机器人结合起来,构成一种新型的机器人系统。
其特点在于,将多个刚体部分通过柔性连接构成一个整体,在此基础上再进行机械臂设计及运动控制,使得机器人系统在运动中能够具备较高的柔性和韧性,同时兼备高刚度和高精度的优点。
与传统的刚体机器人相比,刚柔耦合机器人具有以下几个方面的特点:(1)柔性连接:用柔性连接将多个刚体部分构成一个连续的机械臂结构,使得机械臂在操作时能够兼顾柔性和刚度。
(2)高韧性:由于采用了柔性部件,机械臂的韧性得到了提高,在进行协作任务时具有较好的适应能力。
(3)高效率:柔性部件的加入使得机械臂的运动更加平稳,能够在较高的速度下进行操作,提高了工作效率。
3.刚柔耦合并联机器人的动力学模型为了更好地掌握刚柔耦合并联机器人的运动特性,需要对其进行动力学建模。
在机器人运动学模型中,关节角度、连杆长度以及机器人末端的空间位置是非常重要的参数。
在刚柔耦合机器人中,由于连接部件的柔性,连接部件的长度随时间和机器人的运动而变化。
因此,建立刚柔耦合并联机器人的动力学模型需要考虑柔性连接部件的材料特性和节点运动方程。
在建立动力学模型时,可以采用Lagrange动力学方法。
其中,Lagrange的动力学方程可以表示为:Lagrange(T)- Lagrange(U)=d/dt(dL/d/dt(T))其中T表示机械臂的运动状态参数,U表示势能,L表示机械臂的动能。
利用该方程可以求解机械臂在运动过程中所受到的各种力。
4.刚柔耦合并联机器人的运动控制刚柔耦合并联机器人的运动控制是实现机器人高精度和高柔性的重要措施。
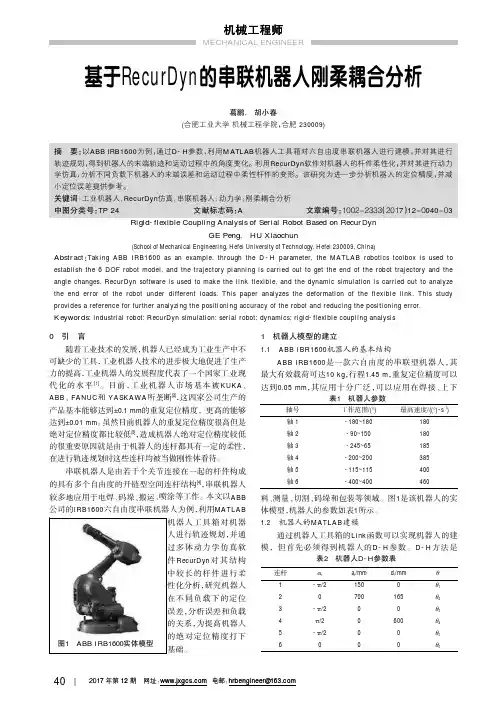
刚柔耦合动力学——轻量化协作机器人设计与控制的力学基础——解读《机器人刚柔耦合动力学》尹海斌【期刊名称】《中国机械工程》【年(卷),期】2018(029)024【总页数】4页(P3020-3023)【作者】尹海斌【作者单位】武汉理工大学湖北省数字制造重点实验室,武汉,430070【正文语种】中文1 机器人技术的发展趋势1.1 背景与现状随着技术的发展、社会的进步,人们越来越意识到人与自然和谐相处的重要性,其中最重要的一条就是减少对大自然的索取与排放,为此,人们提出了工业发展的节能减排约束机制。
机器人技术的发展也应该遵循这一工业化发展的大趋势,向节能化方向发展。
另外,随着用工成本的上升、社会老龄化的加剧,机器人越来越被看好,它是一个可以替代人工去做很多繁重和重复性工作的工具;要提高机器人的人工替代率,机器人必须具有一定的智能。
因此,节能与智能是机器人技术发展的两大趋势。
现有的绝大多数机器人结构设计是结构刚度最大化,以减小机器人结构的振动而实现精确的运动定位。
但是,这种最大化刚度结构的机器人用材多、不经济,结构笨重不节能,惯量大而动态性能差,生产效率低。
况且,不存在绝对的刚性结构,一定条件的输入会激励出一定频率的振动,即使设计成最大化刚度结构,机器人在高速重载的工作条件下同样面临着结构振动的问题。
因此,要提高机器人运动的精度(降低柔性结构振动),往往会以牺牲其性能指标(节能经济、动态性、效率、工作条件)为代价。
机器人大量应用于工农业生产,但其人工替代率仍不足1%,这是因为机器人还不能够如人一般自主适应外界环境和目标的变化,进行自主安全的运动和操作。
柔顺结构或柔顺关节具有很好的适应性能,能够适应环境和目标的变化,能够感知操作者的动作意图,但同时也会存在结构振动从而带来运动控制精度的问题。
柔性机器人轻量节能,对环境和目标的变化具有适应性,但也存在因为结构刚度较低而导致的结构振动的问题。
要想充分利用柔性结构的优点,关键是要解决柔性结构带来的振动问题。

第6期(总第169期)2011年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2011)06-0071-03基于刚柔耦合的自动化动力学仿真分析研究张士存1,付月磊2(1.南车青岛四方机车车辆股份有限公司,山东 青岛 266111;2.安世亚太科技(北京)有限公司,北京 100026)摘要:刚柔耦合是多体系统最常见的力学模型,在其建模分析过程中存在一定的复杂性与重复性。
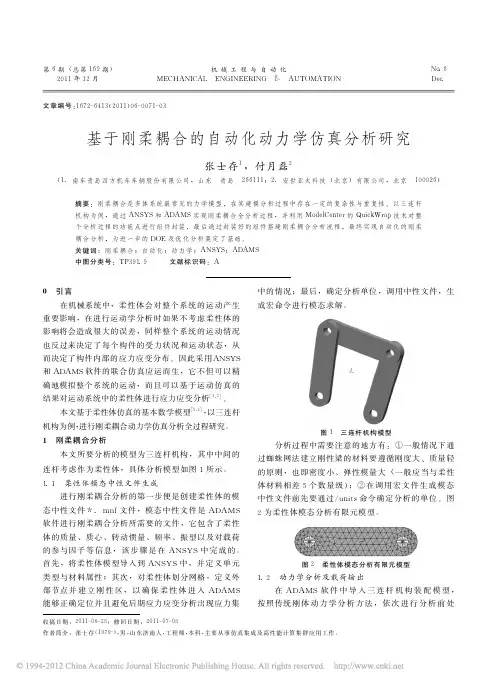
以三连杆机构为例,通过ANSYS和ADAMS实现刚柔耦合全分析过程,并利用ModelCenter的QuickWrap技术对整个分析过程的功能点进行组件封装,最后通过封装好的组件搭建刚柔耦合分析流程,最终实现自动化的刚柔耦合分析,为进一步的DOE及优化分析奠定了基础。
关键词:刚柔耦合;自动化;动力学;ANSYS;ADAMS中图分类号:TP391.9 文献标识码:A收稿日期:2011-06-28;修回日期:2011-07-08作者简介:张士存(1979-),男,山东济南人,工程师,本科,主要从事仿真集成及高性能计算集群应用工作。
0 引言在机械系统中,柔性体会对整个系统的运动产生重要影响,在进行运动学分析时如果不考虑柔性体的影响将会造成很大的误差,同样整个系统的运动情况也反过来决定了每个构件的受力状况和运动状态,从而决定了构件内部的应力应变分布。
因此采用ANSYS和ADAMS软件的联合仿真应运而生,它不但可以精确地模拟整个系统的运动,而且可以基于运动仿真的结果对运动系统中的柔性体进行应力应变分析[1,2]。
本文基于柔性体仿真的基本数学模型[3,4],以三连杆机构为例,进行刚柔耦合动力学仿真分析全过程研究。
1 刚柔耦合分析本文所要分析的模型为三连杆机构,其中中间的连杆考虑作为柔性体,具体分析模型如图1所示。
1.1 柔性体模态中性文件生成进行刚柔耦合分析的第一步便是创建柔性体的模态中性文件*.mnf文件,模态中性文件是ADAMS软件进行刚柔耦合分析所需要的文件,它包含了柔性体的质量、质心、转动惯量、频率、振型以及对载荷的参与因子等信息,该步骤是在ANSYS中完成的。
车辆系统刚柔耦合多体动力学的发展综述摘要:随着科技的发展,货物列车的轻量化设计成为趋势。
采用轻型部件可以显著地降低车辆的质量,达到了货车重载、低动力的目标。
轻型部件的刚度小,采用传统刚体模型不能准确模拟实际性能。
本文介绍了刚柔耦合多体动力学的发展,研究证明刚柔耦合模型可以比较准确的模拟实际车辆的性能。
关键词:重载货车、刚柔耦合、多体动力学1引言重载货车的大轴重转向架的低动力设计以及车体的轻量化设计都要求尽量地降低质量,所以在重载货车设计中应用了大量轻型部件。
传统的车辆动力学仿真计算将车辆中的各个部件均考虑为刚体,根据实际情况,刚体之间、刚体与固定坐标系之间用铰接、力元等联系起来,以此建立车辆动力学模型进行仿真计算。
由于轻型部件的刚度比以前的小,而车辆运行速度的提高,部件之间的作用力增大,所以这些部件在车辆运行的过程中会产生相对较大的弹性变形。
所以这种将所有部件全部考虑为刚体建立的模型不能准确地反映现代新设计的车辆的性能。
因此,将车辆结构中一些刚度比较小、在运行过程中可能发生弹性变形的一些部件考虑为柔性体,其它部件仍考虑为刚体,以此建立的车辆系统刚柔耦合多体动力学模型可以更准确的模拟实际车辆的性能。
这种方法在车辆动力学模拟及部件疲劳寿命预测中得到了广泛应用。
2刚柔耦合多体动力学原理多体系统是由若干刚体或柔体通过力元或铰连接而成的一个完整系统。
多体系统的基本元素包括:惯性体、力元、约束和外力(偶)。
多体系统动力学主要应用在机构的静力学分析、特征模态分析、线性响应分析、运动学分析和动力学分析等,主要是应用计算机技术进行复杂机械系统的动态仿真分析。
柔性多体系统动力学主要研究客体本身刚度较低、受冲击易发生变形或客体的附属部件刚度较大而本身刚度较低,在进行耦合之后,会产生弯曲、变形等特征的大型动力学系统,分析动力学特性时需要考虑其弹性振动的影响。
由于柔性体上任意两点的位移在受到外界激励的情况下会发生位移变化,所以,多柔体系统不但需考虑零部件之间连接元件的刚度、阻尼等特性,还需要考虑部件本身结构的变化特征。
绳驱动刚-柔-软耦合机器人的设计与分析
许泽华;杨凯盛;陈特欢;卢一标;钱灿;胡俊豪;阮阳飞
【期刊名称】《机械制造》
【年(卷),期】2024(62)2
【摘要】狭窄空间、复杂结构环境等应用场景要求机器人具有较高的柔顺性、灵活性、适应性、安全性,传统机器人难以满足这些要求。
对此,设计了一种绳驱动刚-柔-软耦合机器人。
这一机器人由连续型关节和刚性离散型关节串联而成,既具有连续型机器人的柔顺性和适应性,又通过末端离散型关节弥补连续型关节转弯半径大等不足,提高机器人末端灵活性。
这一机器人具有刚-柔-软耦合、串并联混合的特点,机器人逆运动学分析较为复杂,难以获得解析解。
对此,提出一种基于复合形优化算法的逆运动学求解方法,具有较高的计算效率。
在运动学建模分析的基础上,对这一机器人的工作空间进行了分析。
【总页数】7页(P1-7)
【作者】许泽华;杨凯盛;陈特欢;卢一标;钱灿;胡俊豪;阮阳飞
【作者单位】宁波大学机械工程与力学学院
【正文语种】中文
【中图分类】TP242.2
【相关文献】
1.一类刚—柔耦合系统柔体模态分析的特征
2.基于刚-柔耦合多柔体动力学的悬架系统分析及优化
3.考虑驱动耦合的绳驱动外肢体机器人运动建模及控制研究
4.基
于刚软耦合模型和粒子群优化的手术机器人骨钻削力控制5.一种用于刚软混杂机器人仿真的耦合模型
因版权原因,仅展示原文概要,查看原文内容请购买。
基于刚柔耦合瞬态动力学分析的货叉机构疲劳寿命计算
张雨佳;李红勋;彭超
【期刊名称】《军事交通学院学报》
【年(卷),期】2017(019)007
【摘要】为保证某型越野叉车货叉的疲劳寿命满足使用要求,对其货叉机构进行建模,利用Ansys Workbench软件对货叉进行刚柔耦合,并对举升过程进行瞬态动力学分析,对货叉最大加速度的变化规律进行研究,并基于货叉极限工况对货叉疲劳寿命进行计算.结果表明,货叉满足疲劳性能的要求,该疲劳寿命计算方法具有通用性及实用性.
【总页数】4页(P86-89)
【作者】张雨佳;李红勋;彭超
【作者单位】军事交通学院研究生管理大队,天津 300161;军事交通学院国家应急交通运输装备工程技术研究中心,天津 300161;军事交通学院研究生管理大队,天津300161
【正文语种】中文
【中图分类】U463.92
【相关文献】
1.基于刚柔耦合的搁脚机构动态r仿真及疲劳寿命分析 [J], 彭晨晨;秦宝荣;贾夫洋;谢巍;王郑兴
2.基于刚柔耦合系统的关键零部件动应力仿真和疲劳寿命计算 [J], 陆正刚;胡用生
3.基于弯扭耦合的轴系瞬态分析和疲劳寿命计算 [J], 刘宗发;胡义;何雅威;陈炳文
4.基于刚柔耦合狂呼回转臂有限元分析及疲劳寿命计算 [J], 赵九峰
5.自控飞机大臂刚柔耦合动力学分析及疲劳寿命计算 [J], 赵九峰
因版权原因,仅展示原文概要,查看原文内容请购买。
刚—柔耦合系统动力学建模理论与仿真技术研究一、概述随着现代科学技术的发展,刚—柔耦合系统在航空、航天、机械工程等多个领域发挥着越来越重要的作用。
这类系统通常由刚体部分和柔性体部分组成,其动力学行为既包含刚体的运动特性,也包含柔性体的变形特性。
如何准确、高效地对刚—柔耦合系统进行动力学建模和仿真,对于理解和预测系统在实际工作条件下的行为,以及优化系统设计具有重要意义。
本文旨在对刚—柔耦合系统的动力学建模理论与仿真技术进行深入研究。
将对刚—柔耦合系统的基本概念、特点和分类进行介绍,明确研究背景和意义。
随后,将综述当前在刚—柔耦合系统动力学建模领域的主要方法和进展,包括基于多体系统动力学理论的建模方法、有限元方法、以及近年来兴起的刚—柔耦合建模方法。
在此基础上,本文将重点探讨刚—柔耦合系统动力学建模的关键技术,如刚柔耦合界面的建模、参数识别、以及模型验证等。
本文还将探讨刚—柔耦合系统动力学仿真的相关技术。
仿真技术的选择和实现对于准确预测系统动态行为至关重要。
本文将分析不同的仿真策略,如多体系统动力学仿真、有限元仿真以及多尺度仿真,并探讨这些策略在刚—柔耦合系统中的应用。
同时,将讨论仿真过程中可能遇到的问题和挑战,如计算效率、精度控制和结果分析等。
本文将通过具体的案例研究,展示所提出的动力学建模与仿真技术在刚—柔耦合系统中的应用效果,验证所提方法的有效性和实用性。
通过本文的研究,期望能为刚—柔耦合系统动力学建模与仿真技术的发展提供新的理论依据和技术支持。
1. 刚—柔耦合系统的定义与特性刚—柔耦合系统是指在工程实际中广泛存在的一类复杂系统,其核心特点在于系统内同时包含了刚性部件和柔性部件。
这种系统的动力学行为不仅受到刚性部件的直接影响,还受到柔性部件的显著作用。
刚—柔耦合系统的动力学建模与仿真技术研究,对于理解和预测这类系统的动态行为具有重要的理论和实际意义。
刚—柔耦合系统可以被定义为一个由至少一个刚性部件和一个柔性部件组成的动力学系统。
刚柔耦合机器人力学特性分析与优化机器人力学一直是科学家们研究的热门领域之一,而刚柔耦合机器人则是在传统刚性机器人的基础上,引入了柔性元件,使得机器人在灵活性和精准性方面有了更好的平衡。
本文将从机器人力学特性的角度出发,对刚柔耦合机器人进行分析与优化。
刚柔耦合机器人力学特性的分析是研究刚柔耦合机器人的重要课题之一。
首先,我们需要了解刚柔耦合机器人的基本结构和工作原理。
刚柔耦合机器人一般由刚性链和柔性链组成,刚性链由刚性连接件组成,可以提供刚性运动;柔性链由柔性连接件组成,可以提供柔性运动。
通过刚柔耦合机构的设计,可以将刚性链和柔性链的力学特性相结合,从而提高机器人的适应性和灵活性。
刚柔耦合机器人的力学特性主要包括刚性特性和柔性特性。
刚性特性是指机器人在刚性链中的刚性运动特性,主要包括位置精确性、刚度和载荷能力等。
位置精确性是指机器人在执行任务时的位置精度,即机器人能否达到目标位置并保持稳定。
刚度是指机器人在负载作用下的变形能力,即机器人是否能够承受较大的负载而不发生过大的变形。
载荷能力是指机器人能够承受的最大负载,即机器人的工作能力。
柔性特性是指机器人在柔性链中的柔性运动特性,主要包括柔性度和柔性变形特性等。
柔性度是指机器人在执行任务时的柔性程度,即机器人能否适应不同的工作环境和工作要求。
柔性变形特性是指机器人在外界载荷作用下的变形情况,即机器人是否能够在外界载荷作用下保持稳定,并且能够恢复到原始形状。
刚柔耦合机器人的力学特性分析可以采用仿真模拟和实验验证相结合的方法。
通过建立刚柔耦合机器人的力学模型,可以对机器人的力学特性进行仿真模拟,从而得到机器人在不同工作条件下的运动特性和力学性能。
同时,还可以通过实验验证的方法,对机器人进行实际测试,验证仿真模拟结果的准确性和可靠性。
在对刚柔耦合机器人进行力学特性分析的基础上,还可以通过优化设计来改善机器人的力学特性。
优化设计可以根据机器人的具体需求和工作条件,对机器人的结构参数进行调整和优化,从而提高机器人的力学性能和工作能力。
刚柔耦合车辆动力学动态响应分析∗张成功【摘要】为了分析弹性车体结构振动特性及对曲线通过能力的影响,用运多体动力学建模仿真软件SIMPACK分别建立某型动车组刚性动力学仿真模型和柔性车体与刚性走行部耦合动力学仿真模型,通过对两种模型的垂向和横向动力学动态响应进行比较和分析。
结果表明,刚柔耦合模型车体振动加速度均方值( RMS)和Sperling指标均较多刚体模型大,曲线通过能力减小。
%In order to analyze the vibration characteristics of the elastic body and the influence of the vibration response and curving performance of the frame and wheels, The dynamic simulation models of a certain type of EMU about the rigid and the coupling of a flexible body and the rigid running gear are established by the multi-body dynamics simulation software SIM-PACK. After comparing and analyzing the vertical and lateral dynamics performance of the two models, the result is showed that rigid-flexible coupling model vehicle acceleration mean square ( RMS) and Sperling indicators are relatively large rigid body model, and also curving performance has been reduced.【期刊名称】《机械研究与应用》【年(卷),期】2016(029)002【总页数】3页(P12-14)【关键词】耦合模型;垂向与横向;曲线性能【作者】张成功【作者单位】兰州交通大学机电工程学院,甘肃兰州 730070【正文语种】中文【中图分类】TH132.41高速车辆车体的轻量化能够有效的降低轮轨之间的作用力,减少制造费用,节约能源,为了实现车体轻量化目标,中空铝合金或轻质不锈钢等材料被广泛的应用到车体的制造中,但是车体的轻量化往往引起了车体振动的变化,旅客乘坐舒适性有所下降[1];再者,随运行速度的不断提高,车辆运行的平稳性、舒适性和安全性也受到了一定的影响[2-4];所以,轨道车辆随着高速化和轻量化的快速发展,将车体考虑成刚性模型已经不能满足研究和分析车体动力学的需求,而考虑车体弹性变形的柔性车体模型将对车体振动的仿真研究更加准确和符合实际。
基于约束刚柔耦合系统的叉车振动研究发表时间:2018-08-31T14:18:39.510Z 来源:《防护工程》2018年第8期作者:周宇明[导读] 在此基础上,利用椭圆轴转动转向轴,发动机的两个橡胶部件和框架连接在一起。
在相同的条件下,仿真将改进车辆系统,并通过实验验证。
实验结果表明,该研究具有重要意义周宇明浙江建正检测技术有限公司浙江杭州 311403摘要:某种类型的叉车驾驶座位强烈振动性能缺陷的研究,通过使用多体动力学的方法,充分考虑叉车的空间框架,灵活性和路面动态性能对叉车的影响。
叉车驾驶基于约束耦合动力学模型动态特性仿真和评估。
根据实验结果,验证了理论模型和仿真模型的正确性。
在此基础上,利用椭圆轴转动转向轴,发动机的两个橡胶部件和框架连接在一起。
在相同的条件下,仿真将改进车辆系统,并通过实验验证。
实验结果表明,该研究具有重要意义。
关键词:约束;刚柔耦合;叉车振动1前言叉车在企业物流系统中起着重要的作用。
是机械化装卸、堆垛和短途运输的有效设备。
我国叉车行业发展迅速,但与国外产品相比,仍存在严重的振动、噪声、可靠性和舒适性的问题。
由于振动机理的复杂性问题,不能简单地通过类比模仿就可以实现叉车的优异的机器振动性能和舒适,问题的根源不仅与组件的制造质量有关,更重要的是连接的耦合匹配。
本文中,驾驶员座椅和方向盘在工作状态下的振动可能是由发动机引起的共振或强迫振动引起的。
为了找出原因并找到解决方案,测试分析系统用于测试方向盘和座椅的振动加速度。
建立了车辆有限元模型,并进行了谐波分析。
通过有限元分析和试验结果,对有限元模型进行了修正,仿真模型符合实验结果,并用于叉车结构的重新设计和再分析。
避免振动和损坏,优化叉车结构。
2刚性和挠性耦我们需要横向加强连接,这也是板块结构,影响相对较弱。
由于转向桥可以来回旋转,所以在桥的中间,因为它是垂直连接到框架的,所以很难使用刚度。
在叉车框架结构中,由于其结构是形图结构,因此,在横向的两侧承重是非常重要的,因此,根据实际情况,他的厚度和质量越大,如果为柔性体的叉车框架。
基于 Adams刚柔耦合仿真分析及应用【摘要】:剪式稳定架系统常用于汽车车身输送线,可实现车身的升降与运输。
其上框架布置2台电机,通过皮带带动下框架和吊具,实现升降。
在实际运行过程中,由于存在升降皮带安装轮安装相位偏差、皮带缠绕驱动轮运行过程旋转半径波动、皮带不等长等因素,造成下框架倾斜。
在升降过程中,由于运动不平衡,4根剪式稳定架可能产生较大的作用力,存在安全隐患。
因为采用多刚体系统计算会产生卡死现象,所以对剪式稳定架进行柔性化处理,从而得到刚柔耦合的多体系统,然后进行动力学仿真分析,预测剪式稳定架的受力情况,为产品设计和优化提供参考。
【关键词】:剪式稳定架;Adams;刚柔耦合;仿真分析引言1996年,ADAMS推出ADAMS Flex模块,实现了同时包含刚体和柔体的机构动力学分析。
ADAMS中的柔性体分为离散式和模态式2种:离散式柔性体是把一个刚体构件离散为几个小刚性构件,小刚体构件之间通过柔性梁连接,离散式柔性体的变形是柔性梁的变形,并不是小刚体构件的变形,这种柔性体可以模拟物体的非线性变形,但只适用于简单结构;模态式柔性体是由ADAMS Flex模块或外部有限元软件生成,能根据构件的实际结构进行复杂建模,这种柔性体采用的是模态叠加法来模拟物体变形,故仅适用于线性结构的受力分析。
1刚柔耦合基本理论在外部载荷作用下,物体一定会发生弹性变形,所以,多体系统都可以等效认为是一个多柔性系统。
在这种情况下,如果所研究的部件刚度大并且不考虑部件的应力-应变响应,则可以将该部件视为刚体。
但是当所研究部件的弹性变形对系统的影响较大,或者在外部载荷作用下部件的变形较为明显时,则必须考虑部件的弹性系数。
此时,就需要把所研究部件进行柔性化处理,以使多体系统更接近实际情况。
本文进行刚柔耦合仿真时采用了RecurDyn中提供的有限元柔性体建模。
有限元柔性体实现了有限元技术与多体动力学的有机结合,克服了模态柔性体对接触问题建模不准确,柔性体变形后模态需要及时更新的缺点,采用节点之间的相对位移和旋转作为节点坐标来描述结构的变形,具有较高的计算精度。