workbench刚柔耦合动力学分析
- 格式:doc
- 大小:612.00 KB
- 文档页数:8
机器人刚柔耦合动力学
机器人的刚柔耦合动力学是指在机器人的设计中考虑机体的柔性结构对动力学的影响,同时将刚性结构与柔性结构进行耦合,使机器人更加灵活、优化及能适应更多的任务。
机器人刚柔耦合动力学有两个重要的方面,一个是刚柔耦合建模,另一个是刚柔耦合
控制。
在建模方面,需要将机器人的刚性结构、柔性结构和任务环境建立相应的数学模型,以便用于控制设计和仿真验证。
在控制方面,需要将控制算法应用于机器人控制中,以更
好地实现机器人在复杂环境下的操作,同时考虑柔性结构的影响,提高控制性能。
刚柔耦合建模是指在机体的柔性结构和刚性结构之间建立相应的数学模型。
这个建模
过程需要考虑到机器人的各种复杂的运动方程,还需要考虑机器人在任务环境中的受力情
况以及相应的控制策略。
在建模过程中,需要采用一些数学工具,如变分法、多体动力学
以及有限元法等,以确保精准的建模和仿真。
在控制方面,针对机器人的刚柔耦合动力学建模,需要采用一些高级控制算法,如模
型预测控制、鲁棒控制以及优化控制等。
这些计算技术通常需要使用高性能计算技术来实
现快速计算和实时响应。
此外,在设计“柔软”机器人百年来,还采用了多种控制策略,
如逆动力学控制、反馈控制等,以实现更好的动作学习和运动控制。
总之,机器人的刚柔耦合动力学是机器人研究领域中非常重要的一部分。
通过应用现
代数学、物理及计算科学技术,可以实现机器人在复杂环境中的操作,具有更高的灵活性
和优化性能。
同时,还可以为机器人未来的发展和应用提供更多的潜在机会和支持。

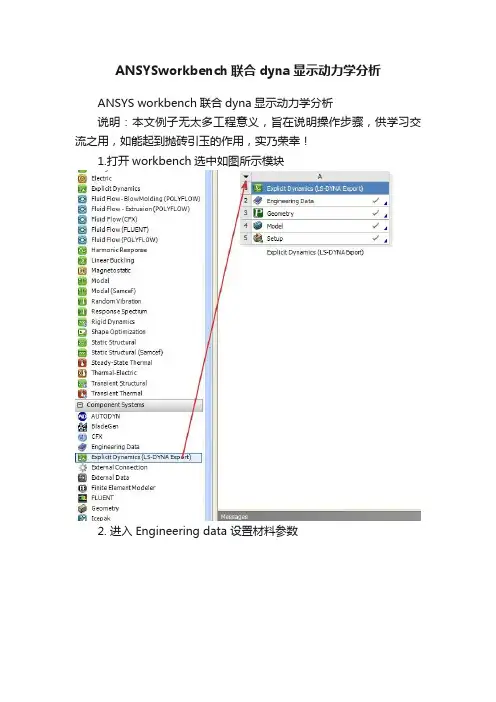
本文主要介绍使用SolidWorks、HyperMesh、ANSYS和ADAMS软件进行刚柔耦合动力学分析的主要步骤。
一、几何建模在SolidWorks中建立几何模型,将模型调整到合适的姿态,保存。
此模型的姿态不要改动,否则以后的MNF文件导入到ADAMS中装配起来麻烦。
二、ADAMS动力学仿真分析将模型导入到ADAMS中进行动力学仿真分析。
为了方便三维模型的建立,SolidWorks中是将每个零件单独进行建模然后在装配模块中进行装配。
这一特点导致三维模型导入到ADAMS软件后,每一个零件都是一个独立的part,由于工作装置三维模型比较复杂,因此part数目也就相应的比较多,这样就对仿真分析的进行产生不利影响。
下面总结一下从三维建模软件SolidWorks导入到ADAMS中进行机构动力学仿真的要点。
(1)首先在SolidWorks中得到装配体。
(2)分析该装配体中,至U底有几个构件。
(3)分别隐藏其他构件而只保留一个构件,并把该构件导出为*.x_t格式文件。
(4)在ADAMS中依次导入各个*.x_t文件,并注意是用part的形式导入的。
(5)对各个构件重命名,并给定颜色,设置其质量属性。
(6)对于产生相对运动的地方,建议先在此处创建一个marker,以方便后面的操作。
否则,三维模型进入ADAMS后,线条繁多,在创建运动副的时候很难找到对应的点。
部件的导入如下图1所示:图1文件输入File Type 选择Parasolid;File To Read找到相应的模型;将Model Name 切换到Part Name,然后在输入框中右击,一次单击part宀create然后在弹出的新窗口中设置相应的Part Name,然后单击OK宀0K。
将一个部件导入,重复以上步骤将部件依次导入。
这里输入的技巧是将部件名称按顺序排列,如zpt_1、zpt_2、zpt_3.,然后在图1中只需将zpt_1改为zpt_2、将PART_1改为PART_2即可。

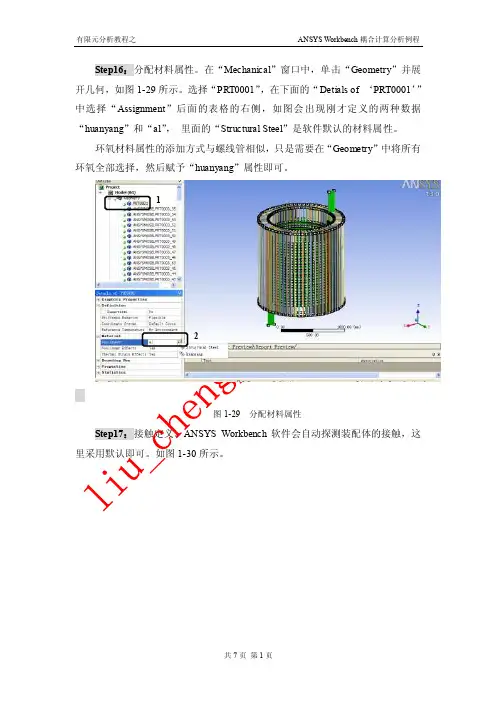
Step16:分配材料属性。
在“Mechanical”窗口中,单击“Geometry”并展开几何,如图1-29所示。
选择“PRT0001”,在下面的“Detials of ‘PRT0001’”中选择“Assignment”后面的表格的右侧,如图会出现刚才定义的两种数据“huanyang”和“al”,里面的“Structural Steel”是软件默认的材料属性。
环氧材料属性的添加方式与螺线管相似,只是需要在“Geometry”中将所有环氧全部选择,然后赋予“huanyang”属性即可。
12里采用默认即可。
如图图1-30 接触设置Step18:网格剖分。
选择螺线管实体,单击右键选择“Method”命令,在右下角出现的“Detials of ‘Automatic Method’”中的“Method”下拉列表框中选择“Automatic”,同样的操作在环氧板上面。
如图1-30所示。
图1-30 螺线管网格剖分设置螺线管和环氧板网格设置完成后,开始设置网格大小,单击左侧的“Outline”中的“Mesh”,在下面出现的“Detials of ‘Mesh’”中,选择“Relevance Center”下拉列表框中的“Fine”,表示划分的网格比较密。
如图1-31所示。
图1-31 网格大小设置Step19:设置边界条件。
首先,将选择器有体改成面,然后单击“Outline”中的“Static Structural”,在右侧图像窗口中选择一个面(选中后面呈现出绿色)单击右键选择“Insert”,再选择“Fixed Support”,一次将64个外表面全部定义为固定边界条件,如图1-32所示。
12图1-32 设置边界条件Step20:设置激励载荷。
ANSYS Workbench 13.0与以前版本最大的不同,在做电磁结构耦合分析时,可以直接导入Ansoft Maxwell计算得到的体积(或面)力密度值,作为其外载荷施加到实体(或面)上,具体操作如图1-33所示。
基于刚柔耦合模型对动力学的分析【摘要】本文基于国内某高速列车,分别建立其多刚体和刚柔耦合动力学模型,通过计算两种模型的动力学指标,分析车体弹性振动对车辆系统动力学的影响。
【关键词】高速列车;刚柔耦合模型;车辆系统动力学1 前言当今高速列车发展主要围绕高速化和轻量化这两大主题展开。
由此引发的问题也伴随而来:一方面,当列车行驶速度升高时,轨道的激扰频率会随之升高,而另一方面车体逐步轻量化也导致车辆结构本身刚度的下降,因此减低了车辆结构本身的自振频率,更容易在高频激扰下发生共振,从而恶化高速列车的动力学性能。
但传统的车辆动力学分析中,将车辆系统考虑成多刚体,无法考察高速列车部件结构振动对动力学性能的影响。
本文基于国内某高速列车分别建立多刚体和刚柔耦合动力学模型,计算分析车体弹性振动对车辆系统动力学的影响。
2 模型建立轨道车辆实际是一个复杂的弹性多自由度振动系统,通过仿真的方法完整描述出动力学特性是不可能的,因此在对其进行动力学分析时,需要建立一个相对简化的多体动力学模型。
本文以某高速列车为研究对象,分别建立其多刚体和车体为弹性体的刚柔耦合系统模型。
3 动力学指标对比分析本文中利用国家针对车辆系统动力学性能评定的相关标准及规定,在SIMPACK中对所建的两种车辆系统模型的各项动力学性能指标进行计算分析,总结两者之间的差异。
3.1 运行稳定性指标对比分析图1 580km/h、581km/h时多刚体模型各轮对横向位移通过图1可以发现,多刚体模型中当车辆运行速度为580km/h时,当车辆系统通过一段有激扰的轨道谱后,各轮对的横向位移量很快衰减,而当车辆以581km/h的速度运行时,通过有激扰路段后,各位轮对的横向位移量出现等幅振荡现象,则多刚体车辆系统模型在580km/h达到临界速度。
图2 534km/h、535km/h时刚柔耦合各轮对横向位移通过图2发现刚柔耦合车辆系统模型在534km/h时达到临界速度。
通过以上计算得到,刚柔耦合模型的稳定临界速度为534km/h低于多刚体模型的580km/h,与实际稳定临界速度更为接近。
基于ANSYSWorkbench对凸轮结构动力学分析龙源期刊网 /doc/723408356.html,基于ANSYSWorkbench对凸轮结构动力学分析作者:王飞黄志鹏刘兴来源:《科技视界》2018年第21期【摘要】本文以凸轮上的应力变化和杆的末端输出力为研究对象,进行了刚柔耦合的凸轮传动过程应力分布分析,最后观察计算结果发现,在整个过程中最大应力出现在小圆与杆接触的时候,但小于凸轮材料的屈服强度,所以结构在传动过程中,并不会因为应力过大而导致凸轮的损坏。
通过研究杆末端输出力的过程曲线,发现在凸轮与杆刚接触进行传动的时候,力有出现上下震荡的情况。
最后对于该结构传动结果,本文还提出了改善的方案。
【关键字】凸轮结构;应力分布;有限元分析中图分类号:G642 文献标识码:A 文章编号:2095-2457(2018)21-0037-002DOI:10.19694//doc/723408356.html,ki.issn2095-2457.2018.21.017【Abstract】In this paper, the stress on the cam and lever at the end of the output force as the research object, has carried on the coupled stress distribution analysis of cam transmission process,the last observation results found that the maximum stress appears in the whole process in a small circle in contact with the rod, but less than the yield strength of cam material,so the structure in the process of transmission, will not cause the damage of the cam because of the stress. By studying the process curve of the output force at the end of the rod, it is found that when the cam is in contact with the rod fortransmission, the force will oscillate up and down. Finally, an improved scheme is proposed for the transmission results of the structure.【Key words】Cam structure;Stress distribution;Finite element analysis0 引言凸轮结构在机械设计中常被用于储能结构出现在锻压或者模具机器之中。
刚柔耦合动力学模型
刚柔耦合动力学模型是一种描述刚性物体和柔性物体相互作用
的数学模型。
在此模型中,刚体被视为不可变形的物体,柔体则被视为可以发生形变的物体。
这种模型常用于机械装备、航空航天、生物力学等领域的研究中。
刚柔耦合动力学模型的特点是能够考虑刚体和柔体之间的相互
作用力,从而得到更加准确的物体运动轨迹和形变情况。
这种模型通常包括多个子模型,如刚体动力学模型、柔性体动力学模型、相互作用力学模型等。
刚柔耦合动力学模型的应用范围非常广泛,例如在机器人学中,该模型可以用于描述机器人手臂的运动和柔性传感器的反馈。
在航空航天领域,该模型可以用于研究飞行器的结构设计和控制算法。
在生物力学领域,该模型可以用于研究人体肌肉和骨骼系统的运动学和动力学性质。
总之,刚柔耦合动力学模型是一种重要的数学模型,具有广泛的应用前景和研究价值。
- 1 -。
目录1.曲柄-滑块机构 (1)1.1配置ANSYS工作环境 (3)1.2准备连杆柔性体模型 (4)1.2.1在ANSYS里的工作 (4)1.2.2柔性子系统向导 (6)1.3刚柔耦合系统动力学建模 (12)1.3.1创建几何图形 (13)1.3.2创建刚体 (15)1.3.3创建柔性子系统 (16)1.3.4创建铰 (17)1.4刚柔耦合系统动力学仿真 (20)2.柔性平台-电机模型 (26)2.1准备柔性平台 (27)2.1.1在ANSYS环境里工作 (28)2.1.2在ANSYS Workbench环境里工作 (29)2.1.3柔性子系统向导 (36)2.2刚柔耦合系统动力学建模与仿真 (37)2.2.1导入柔性平台 (37)2.2.2连接柔性平台与大地 (38)2.2.3创建几何图形 (38)2.2.4创建力元 (42)2.2.5导入电机子系统 (45)2.2.6设置电机转子速度曲线 (47)2.2.7连接电机与柔性平台 (49)2.2.8计算系统平衡位置和固有频率 (51)2.2.9运动仿真 (53)1.曲柄-滑块机构本例模型为一个曲柄-滑块机构,如图 1.1所示。
在{UM Data}\SAMPLES\ Flex目录有一个名为slider_crank_all的模型。
这个模型里共有三个曲柄-滑块机构,其不同之处在于构件连杆的建模方式:⚫连杆为一个刚体;⚫连杆为一个子系统,由11个刚体通过铰和力元连接而成;⚫连杆为一个柔性体,从有限元软件导入。
图1.1 曲柄-滑块机构:1-机架,2-曲柄,3-连杆,4-滑块这里主要介绍第三个模型——刚柔耦合机构的建模流程:1.建立连杆的有限元模型;2.计算所需的模态,并转换保存为UM格式;3.创建几何图形;4.创建刚体(曲柄和滑块);5.导入连杆弹性体;6.创建铰和力元。
前两步在ANSYS里进行,后面四步在UM软件里进行。
备注:UM使用子系统技术处理外部导入的柔性体,每个柔性体都是一个独立的子系统,导入时选择Linear FEM Subsystem类型。
原创:一个急回机构的刚柔混合的瞬态动力学分析,正在研究这个新的功能。
给大伙介绍一下简单的操作过程和应该注意的事项。
大家一起进步,对于其中的不足大伙可以指出来,见笑了。
这是一个类似牛头刨床的急回机构,它的运行原理是这样的:
划分网格:
我选用的材料是钢铁,大家也可以试着选用其他材料。
第一个转动铰链,其实无所谓第几个,没有先后顺序。
只要最后全满足条件即可。
这里值得注意点是。
转动铰链对ROTZ没有约束,所以操作的时候一定要注意当前的坐标系Z轴的方向和实际情况相符,如果不一致要修改坐标系。
具体如下:
点这个后,再点:RX,就是绕着X轴旋转的意思。
类似经典界面的WPROTAT,命令
我们转动合理的角度后就完成了一个转动铰链。
其他的就不说了,下面说下平动铰链
平动铰链不约束X 方向的平动。
和上面类似,把X轴指向你要确定方向即可。
如图:另外那个槽铰链也是如此,最后别忘了让机架接地固结。
然后施加转速,我这里用的是一秒钟一转。
然后施加一个50N(不一定是这个数值)的力在滑块上,记住,滑块定义的是刚体,不能施加力载荷,这里用的是joint-load选项,这个我还没琢磨透。
DOF选择X方向type :详细栏里选择force
剩下就是载荷步设置了:
求解!!!!
结果变形等效弹性应变
滑块X轴的最大加速度等结果
大家可以仔细观察:在转动的某个时刻,这几个地方的变形还是符合我们的尝试的。
好了,
就这样。
不足请指出。
谢谢大伙儿。