同步电动机转矩-转差率曲线仿真
- 格式:doc
- 大小:248.50 KB
- 文档页数:11
异步电动机的转矩-转速特性曲线1.异步电动机转矩—转速研究意义电动机作为重要的动力装置,已被广泛用于工业、农业、交通运输、国防军事设施以及日常生活中。
在轨道列车的牵引动力中电动机也是必不可少的,因此对电动机的控制也非常重要。
电机的控制包括电机的起动、调速和制动。
异步电动机由于具有结构简单、体积小、价格低廉、运行可靠、维修方便、运行效率较高、工作特性较好等优点,因而在电力拖动平台上得到了广泛应用。
据统计,其耗电量约占全国发电量的40%左右。
对于异步电动机的转矩—转速特性曲线则是我们实际控制效果的体现。
2.异步电动机的模型2.1异步电动机的稳态模型其中:Us—定子相电压;fs—定子频率;fsl—转差频率;Is、Ir、Im—分别为定子电流、折算到定子侧的转子电流和励磁电流;Eg—气隙磁通感应电动势;Er—折算到定子侧的转子感应电动势;s—转差率,s=fsl/fs.2.2. 异步电动机的转矩公式通过对运行状态的分析可以得到转矩的公式为:其中,m为相数,pn为极对数,sU为定子电压,Sf为同步频率,s为转差率, SR 为定子电阻,rR为转子电阻,lsX为定子漏感,lrX为转子漏抗。
3. MATLAB仿真数据及仿真结果截图3.1恒磁通时特性曲线在恒磁通时,Eg/fs=const,此时转矩T(N∙M)--转速n(r/s)的运行关系如下图所示。
其源程序如下:a=40;m=3;np=2;Rs=2.497;Rr=5.503;Ls=0.0217;Lr=0.0217;A=m*np/(2*pi);s=0.02:0.001:1;for n=(40:20:80);fs=n;n0=60*fs/np;n=n0-s.*n0;B=2*pi*Lr*fs;T=A*a^2*(Rr*fs*s./(Rr^2+B^2*s.^2));title('牵引异步电机的转矩-转速特性曲线')xlabel('电动机转速n/(r/s)')ylabel('电动机转矩T/(N*M)')plot(n,T,'r.')hold on;end3.2恒功率时的特性曲线恒功率时,Us=const,此时转矩T(N∙M)--转速n(r/s)的运行关系如下图所示。
基于交流电动机动态模型的直接转矩控制系统的仿真与设计学院:信息与电气工程学院专业:电气工程及其自动化班级:08电气三班学号:姓名:基于交流电动机动态模型的直接转矩控制系统的仿真与设计一、设计目的1、应用所学的交流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。
2、应用计算机仿真技术,通过在MATLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
3、在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。
二、设计任务基于交流电动机动态模型的直接转矩控制系统的仿真与设计。
三、交流电动机控制系统设计参数额定输出功率7.5KW;定子绕组额定线电压380V;定子绕组额定相电流12A;定子绕组每相电阻0.5欧姆;定子绕组接线形式Y;转子额定转速980rpm;转子形式:鼠笼式;转子每相折算电阻:3欧姆;转子折算后额定电流30A;额定功率因数:0.75;电机机电时间常数2S;电枢允许过载系数1.5;环境条件:电网额定电压:380/220V;电网电压波动10%;环境温度:-40~+40摄氏度;环境相对湿度:10~90%.控制系统性能指标:转差率:3%;调速范围:D=20;电流超调量小于等于5%;空载起动到额定转速时的转速超调量小于等于30%;稳速精度:0.03.四、设计步骤1、异步电动机的数学模型交流异步电机的数学模型相当复杂,它是一个高阶,非线性,强祸合的多变量系统,坐标变换的目的就是要简化数学模型。
在讨论交流异步电机的数学模型前假设电机有如下特性:(l)电动机三相定、转子绕组完全对称。
(2)电动机定、转子表面光滑,无齿槽效应。
(3)电动机气隙磁动势在空间正弦分布。
(4)铁心涡流、饱和及磁滞损耗忽略不计。
在满足上述理想电动机假设条件下,经推导可得异步电动机在静止坐标系下的数学模型。

运动控制课程设计班级:电气三班学号:姓名:基于交流电动机动态模型的直接转矩控制系统的仿真与设计设计目的应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。
应用计算机仿真技术,通过在MATLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。
1直接转矩控制的基本原理及规律直接转矩控制系统简称DTC(Direct Torque Control)系统,是继矢量控制系统之后发展起来的另外一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面利用转矩反馈直接控制电机的电磁转矩,因此而得名为直接转矩控制。
1.1直接转矩控制系统原理与特点如图1-1为直接转矩控制的原理框图,和VC系统一样,它也是分别控制异步电动机的转速和磁链,转速调节器ASR的输出作为电磁转矩的给定信号*T,T后面设置转矩控制内环,它可以抑制磁链变化对于转矩的影响,从而使得在*转速和磁链系统实现解耦。
因此,从整体控制结构上来看,直接转矩控制(DTC)系统和矢量控制系统(VC)系统是一致的都获得了较高质量的动态性能以及静态性能。
图1-1直接转矩控制系统图的幅值从图中中可以看出,直接转矩控制系统,就是通过使定转子磁链s保持恒定,然后选择合理的零矢量的作用次序和作用时宽,以调节定子磁链矢量的运动速度,从而改变磁通角的大小,以实现对电机转矩的控制。
在直接转矩控制技术中,其基本控制方法就是通过电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角的大小,以达到控制电动机转矩的目的。
从以上介绍我们可以了解到DTC系统在具体控制方法上的一些特点:⑴转矩和磁链的控制采用双位式控制器,并在PWM的逆变器中直接用这两个控制信号产生电压的SVPWM波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的姐结构。
电机大作业专业班级:电气XXXX姓名:XXX学号:XXX指导老师:张*一、研究课题(来源:教材习题4-18)有一台三相四极的笼形感应电动机,参数为kW 17=N P 、V 380=N U (△联结)、Ω=715.01R 、Ω=74.11σX 、Ω='0.4162R 、Ω=' 3.032σX 、Ω=2.6m R 、Ω=75m X 。
电动机的机械损耗W 139=Ωp ,额定负载时杂散损耗W 320=∆p ,试求额定负载时的转差率、定子电流、定子功率因数、电磁转矩、输出转矩和效率。
二、编程仿真根据T 形等效电路:运用MATLAB 进行绘图。
MATLAB 文本中,PN P N =,UN U N =,11R R =,11X X =σ,22R R =',22X X ='σ,Rm R m =,Xm X m =,ao pjixiesunh p =Ω,ao pzasansunh p =∆。
定子电流I11,定子功率因数Cosangle1,电磁转矩Te ,效率Xiaolv 。
1. 工作特性曲线绘制MATLAB 文本:R1=0.715;X1=1.74;Rm=6.2;Xm=75;R2=0.416;X2=3.03;pjixiesunhao=139; pzasansunhao=320;p=2;m1=3;ns=1500;PN=17000;UN=380;fN=50; Z1=R1+j*X1; Zm=Rm+j*Xm; for i=1:2500s=i/2500;n0=ns*(1-s);Z2=R2/s+j*X2;Z=Z1+Zm*Z2/(Zm+Z2);U1=UN;I1=U1/Z;I110=abs(I1);Angle1=angle(I1);Cosangle10=cos(Angle1);P1=3*U1*I110*Cosangle10;I2=I1*Zm/(Zm+Z2);Pjixie=m1*(abs(I2))^2*(1-s)/s*R2;V=(1-s)*pi*fN;Te0=Pjixie/V;P20=Pjixie-pjixiesunhao-pzasansunhao; Xiaolv0=P20/P1;P2(i)=P20;n(i)=n0;I11(i)=I110;Cosangle1(i)=Cosangle10;Te(i)=Te0;Xiaolv(i)=Xiaolv0;hold on;endfigure(1)plot(P2,n);xlabel('P2[W]');ylabel('n[rpm]');figure(2)plot(P2,I11);xlabel('P2[W]');ylabel('I1[A]');figure(3)plot(P2,Cosangle1);xlabel('P2[W]');ylabel('gonglvyinshu'); figure(4)plot(P2,Te);xlabel('P2[W]');ylabel('Te[Nm]');figure(5)plot(P2,Xiaolv);xlabel('P2[W]');ylabel('xiaolv');(1)转速特性)(2P f n =(2)定子电流特性)(21P f I =(3)定子功率因数特性)(cos 21P f =ϕ(4)电磁转矩特性)(2P f T e =(5)效率特性)(2P f =η2. 机械特性曲线绘制1.改变U1值,实现降压调速:U1=(380,330,260,200,150V ) MATLAB 文本:R1=0.715;X1=1.74;Rm=6.2;Xm=75;R2=0.416;X2=3.03;pjixiesunhao=139;pzasansun hao=320;m1=3;p=2;ns=1500;PN=17000;UN=380;fN=50; Z1=R1+j*X1; Zm=Rm+j*Xm;U11=380;U12=330;U13=260;U14=200;U15=150; for k=1:1:5 if k==1U1=U11; elseif k==2 U1=U12; elseif k==3 U1=U13; elseif k==4 U1=U14; else U1=U15 endfor i=1:1:2500 s=i/2500;n0=ns*(1-s);Z2=R2/s+j*X2;Z=Z1+Zm*Z2/(Zm+Z2);I1=U1/Z;I2=I1*Zm/(Zm+Z2);Pjixie=m1*(abs(I2))^2*(1-s)/s*R2;V=(1-s)*pi*fN;Te0=Pjixie/V;n(i)=n0;Te(i)=Te0;endplot(Te,n);hold on;endxlabel('Te[Nm]');ylabel('n[rpm]');降压调速时,临界转差率不变。
电机与拖动em MSP P T ==ΩΩ第三节感应电机的功率方程和转矩方程上节课22cos T m T c I φϕ=第四节感应电机的参数测试第五节感应电机的转矩-转差率曲线一、T-s 曲线•对电机来说,最重要的是T -n 特性;•一般用T -s 曲线来表示1、表达式-仍然用上节的表达式,结合等值电路推导-用T 型等值电路复杂,用近似Γ型等值电路emSp T =Ω''2212em rp m Is=第五节感应电机的转矩-转差率曲线一、T-s 曲线1、表达式'121d u I Z =1'2'22112()()u rr c x cx sσσ=+++2'112'2'21212(/)()S m u r T r cr s x cx s σσ=⋅⋅Ω+++2'112'2'21212/(/)()S m u r s r cr s x cx σσ=⋅Ω+++2'112'2'21212/(/)()S m u r sT r r s x x σσ=⋅Ω+++--常用的简化形式第五节感应电机的转矩-转差率曲线2、曲线-s =0时,T =0;物理意义:不切割磁力线-s ↑但很小,分子↓,分母↓↓,则T 近似正比于s ;物理意义:近似于弹簧-s ↑↑时,T =0,物理意义:定子磁场远远领先,一样不切割磁力线-曲线特点:存在最大值T m , 对应临界转差率s m2'112'2'21212/(/)()S m u r s T r r s x x σσ=⋅Ω+++第五节感应电机的转矩-转差率曲线T s 0 1 -1n电磁制动电动机发电机mT ms 0Sn stT -注意各区间对应的运行状态-注意n 轴和s 轴的对应点和方向关系第五节感应电机的转矩-转差率曲线二、机械特性-转速-转矩特性(n-T 特性)对应[0, n s ]的部分-根据稳定运行区域判据,一般的负载都是正向的特性,要求电机是负向特性-稳定运行区域只是在[0,s m ]-临界的意义TnmT Sn stT 负载特性工作点第五节感应电机的转矩-转差率曲线三、起动转矩特性-由图上可以得到起动转矩-结论:起动转矩不大!启动过程:“翻山越岭”2'112'2'21212()()st S m u r T r r x x σσ=⋅Ω+++1()|st s T T s ==s 01 mT ms 0Sn stT第五节感应电机的转矩-转差率曲线四、最大转矩特性1、数值'22'2112()m r S r x x σσ=±++2112'2111212(())m S m u T r r x x σσ=±Ω±+++'2m kr S x ≈±2112m S km uT x ≈±Ω第五节感应电机的转矩-转差率曲线四、最大转矩特性2、特点(1)显然U↓则Tm↓↓,感应电机的供电电压最敏感!(2)Tm 与r2无关但sm与r2有关,基本上是r2↑使sm↑, 则曲线顶点左移,Tst↑, 对起动有利(3)xk ↑,Tm↓,即漏抗越大,Tm越小(4)s正负不同时Tm大小稍有区别第五节感应电机的转矩-转差率曲线五、简化转矩公式•上面的公式太繁琐,用起来不方便•最有用的区域:对应机械特性那一段,对应(0,s m ]Ts 0mT m s 稳态运行区域第五节感应电机的转矩-转差率曲线五、简化转矩公式•方法:在最大转矩公式中引进s m ,•目的:在该区间用比较简化的形式代替原来的公式•引入:过载系数K T :•为了保证电机过载时的正常运行,K T 一般取1.5~2.5m T NT K T =第五节感应电机的转矩-转差率曲线五、简化转矩公式•在T m , s m 已知的情况下,可以求出来对应任意s 的转矩值•求启动转矩(s =1)•求对应s =0.03时的转矩•问题:如何求T m , s m ?''221''22'22122()21[()()2]m m m m m r r r s T s s r r T s r r s s s s s +=≈+++2mm m T T s s s s =+N n 第五节感应电机的转矩-转差率曲线五、简化转矩公式•已知:P N ,n N ,K T •求:T N ,T m ,T st ……•步骤:•典型题(1)利用P N ,n N ,K T 求出来T N ,s N ,T m 260N N n πΩ=N N N P T =ΩS N N S n n s n −=m T NT k T =,s n第五节感应电机的转矩-转差率曲线五、简化转矩公式•典型题(2)利用额定点求出来s m ,max 21N N m Tm NT s s T K s s ==+2N m T m Ns s K s s +=2(1)m N T T s s K K +−=--关于s m 的一元二次方程第五节感应电机的转矩-转差率曲线五、简化转矩公式•典型题(3)求其他转矩值m 2()m m T T f s s s s s ==+-代入s 数值,可以求出来对应任意s 的转矩值第一部分电机原理第五章感应电机思考问题:1、理解感应电机T-s曲线的特征。
·158·文章编号:2095-6835(2021)11-0158-03基于Ansoft Maxwell 软件的异步电动机仿真教学实践宁银行(上海电机学院电气学院,上海201306)摘要:有限元仿真技术的发展,有效地推动了高校实验教学改革。
以异步电机为例,介绍了基于Ansoft Maxwell 软件的仿真教学,包括磁场分析、绕组设计、感应电势、转矩特性等内容。
教学实践表明,引入仿真技术,能使抽象的概念和原理变得生动形象,有利于学生深入理解电机的运行机理和电磁特性,并培养了学生利用仿真软件解决工程实践问题的能力。
关键词:电机学;仿真技术;实验教学;异步电动机中图分类号:TM301文献标志码:A DOI :10.15913/ki.kjycx.2021.11.0681引言“电机学”是电气工程一级学科的一门重要专业基础课程,涉及变压器、直流电机、异步电机和同步电机等内容,包括电机的结构、原理、特性等内容,课程知识范围广,内容抽象,学生普遍反映不易理解。
电机学实验、实践等环节教学效果的好坏直接影响到学生对理论知识的理解和应用[1],加大实验教学改革是近年来高等教育界形成的共识[2-4]。
由于实验技术、实验场地、经费等原因,导致传统电机学实验的实验内容和实验条件受限,存在内容单一、缺乏创新性等问题[5-7]。
为此,不少教育工作者积极呼吁或建议在传统实验的基础上,引入仿真实验[8-10],并探讨了虚拟仿真技术在教学中的应用目前,关于电机本体结构、运行机理、电磁分析等实验教学的文献报道较少,而这些内容却是电机学中的重点和难点。
以Ansoft Maxwell 、Jmag 为代表的有限元仿真软件已经较为成熟,为电机学仿真实验教学提供了技术保障。
本文以异步电机为例,介绍了基于Ansoft Maxwell 的仿真实验。
2仿真软件介绍Ansoft Maxwell 软件是世界上著名的低频电磁场有限元分析软件,在工程电磁领域的分析中得到了广泛的应用。
同步电动机转矩-转差率曲线仿真
1.原理说明
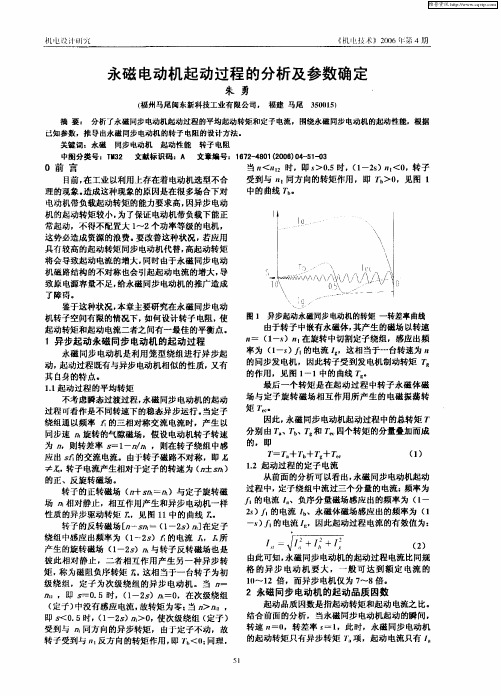
同步电动机的起动常常采用异步启动法,它可以分为两个过程,即未加励磁前的异步运行过程和增加励磁以后的同步牵入过程。
同步电机的异步起动过程中的异步运行并非稳定的异步运行,而是伴随着电磁和机械的瞬态变化,但是由于转子具有较大的转动惯量,就其电磁过程而言,其机械加速度可以忽略不计,这样可以近似的当作一系列不同转差率的稳态异步运行状态来处理,所得的曲线就是所谓的似稳态曲线。
同步电机起动时由于转子绕组不对称,在起动的过程中将会产生单轴转矩,造成转矩-转差率曲线在s=0.5附近下凹,严重的甚至小于负载转矩,使电机无法正常起动。
研究和绘制同步电机起动时的转矩-转差率曲线对于电机设计具有重要的意义。
同步电机在稳态异步运行时,假设它的端电压为三相对称变化且
频率为1f ,对应同步角速度为1ω,转子角速度为ω时,相应转差率为
11()/s ωωω=-,它将在转子中感应出1sf 频率的电流。
由于转子绕组不
对称,这个转子电流将产生分别以1()s ωω+和1()s ωω-速度相对定子旋转,它们分别在定子绕组中感应出1f 和1(12)s f -频率的对称电流。
另外,如果转子励磁绕组外加直流励磁电流时,它还要感应出1(1)s f -频率的对称电流。
这样,同步电机异步运行时,若存在直流励磁,则定子绕组中将产生1f ,1(1)s f -和1(12)s f -频率的谐波电流,转子励磁绕组中将有直流及1sf 频率的电流,阻尼绕组中有1sf 频率的电流。
这样定子绕组三相电流可以写成如下的表达式:
12312
312312312cos cos(12)cos(1)sin sin(12)sin(1)222
cos()cos[(12)]cos[(1)]333222sin()sin[(12)][sin(1)]3332cos()cos[(123a b c i A t A s t A s t A t A s t A s t i A t A s t A s t A t A s t A s t i A t A πππππππ=+-+-+
'''+-+-=-+--+--+
'''-+--+--=++-312
322
)]cos[(1)]33222
sin()sin[(12)][sin(1)]333
s t A s t A t A s t A s t πππππ++-++
'''++-++-+ 如令:
*111111
*222222*333333
11(),()2211(),()2211(),()22
I A jA I A jA I A jA I A jA I A jA I A jA ''=-=+''=-=+''=-=+ 为了计算上的方便,选用1、2、0坐标系统,将a 、b 、c 三相坐标转换为1、2、0坐标系统,可得,,a b c i i i 转换为1、2、0分量:
(12)(1)1123**(12)*(1)2
1
2
3
00
jt j s t j s t jt j s t j s t i I e I e I e i I
e I e I e i -------=++=++= 同理,假定三相对称的端电压为:
cos sin 22cos()sin()3322
cos()sin()
33
a b c u B t B t
u B t B t u B t B t ππππ'=+'=-+-'=+++
并令:
*1()2
1()2
U
B jB U
B jB '=-'=+
则
1*200
jt jt u Ue
u U e u -=== 采用电动机惯例时,同步电机的磁链,电压,转矩方程分别为:
112
2211()()()2
1
()()()2j j j j j f s D j j j j j f s D e G p u e x p e i e x p e i e G p u e x p e i e x p e i θθθθθθθθθθψψ-----⎫
=++⎪⎪⎬⎪
=++⎪⎭
111222s s u p r i u p r i ψψ=+⎫
⎬=+⎭
12212()em T j i i ψψ=-
其中()G p 为运算电导,1()[()()]2
s d q x p x p x p =+为平均运算电抗,
1
()[()()]2
D d q x p x p x p =
-为半差运算电抗。
()d x p 和()q x p 满足: 11
()111d f D ad
Dl fl x p x x x x p
p =+
++
+
+
11()11q Q aq
Ql x p x x x p =+
++
当转子速度为ω不变时,根据海氏位移定理改写上述磁链方程,并设t=0时00θ=,则在稳定异步运行条件下,以1s ω=-,(1)s t θ=-代入整理,可得:
******11112222333
3****2
3
3
2
3
1
1
3
****13313223**2**22
1
1
2
1
2
2
1
2()()()()()em jst jst j st j st T j I I I I I I I
I I I e I I I I e I
I e I I ψψψψψψψψψψψψψψψψψψ--=-+-+-+-+-+-+-+-+-
式中除第一项外,都与时间t 有关,是一种瞬态的脉动转矩。
因
此取第一项为单向电磁功率,以emav T 标识。
进步化简,可以得到:
2
2
232211|2||2|Im[]1122()()
s s m emav
d q r r U T I I s s x js x js =--++-- 上式中第一项为励磁电流所产生的旋转磁场与其在定子绕组中感应的电流相互作用产生的异步转矩,如果励磁绕组没有外加励磁电源,则该项为零;第二项为因转子不对称,转子1sf 频率电流产生的磁场反转分量与其在定子绕组中感应的1(12)s f -频率电流相互作用引起的异步转矩,也就是通常所谓的单轴转矩,当s=0.5时,该项为零;第三项是定子外加电压引起的1f 频率电流产生的旋转磁场与其在转子绕组中感应的1sf 频率电流相互作用的异步转矩。
当同步电机在异步起动过程中的异步运行时,其励磁绕组没有外加电源,故其转矩可以表示为:
22
2
211|2|Im[]122()()
s m emav
d q r U T I s x js x js =-++- 上式中的2I 的共轭值可以通过上述的数学方程求解,其结果如下:
*2
2
()()[()][()]
12D s s D s s jx js U
I x js x js x js j j s
=--++-
同样,1I 求解如下:
1
2
[()(12)]()(12)[()][()(12)]
s s s D s s s j x js s jr U
I r x js s x js x js s jr j
-+=--+-+
根据1I 的定义,任意一相的电流有效值为:
1(12)2||||t s t I I I I -=
===
据此可以绘制相电流的有效值。
2.
仿真结果
仿真采用的数据如下:
定子相电阻0.067a r =,定子总的漏抗0.1709e x =,直轴电枢反应电抗 1.2973ad x =,交轴电枢反应电抗0.7561aq x =,励磁绕组电阻0.001785f r =,
励磁绕组电抗0.2404f x =,直轴阻尼绕组电阻0.13376kd r =,直轴阻尼绕组漏抗0.26kd x =,交轴阻尼绕组电阻0.10128kq x =,交轴阻尼绕组漏抗0.22kq x =
仿真结果如下:
图1:励磁绕组未加入附加电阻,0.001785
r 时转矩-转差率曲线
f
图2:励磁绕组加入附加电阻,0.01785
r=时转矩-转差率曲线
f
图3:励磁绕组加入附加电阻,0.01785
r=时f1频率电流分量有效值
f
图4:励磁绕组加入附加电阻,0.01785
r 时,(1-2s)f1频率电流分量
f
有效值
从图1中可以看出,在起动过程中,进入同步牵入过程前起动转矩小于阻力矩,转子无法加速,达不到亚同步速度。
在图2中,当励磁绕组加入附加电阻后,限制了单轴转矩对起动的不利影响,进入同步牵入过程前起动转矩一直都大于阻力矩,可以顺利地完成起动过程。
图5:励磁绕组未加入附加电阻,0.001785
r 时单轴转矩-转差率曲
f
线
图6:励磁绕组加入附加电阻,0.01785
r 时单轴转矩-转差率曲线
f。