112三相异步电动机的转矩特性和机械特性(精)
- 格式:ppt
- 大小:471.50 KB
- 文档页数:22
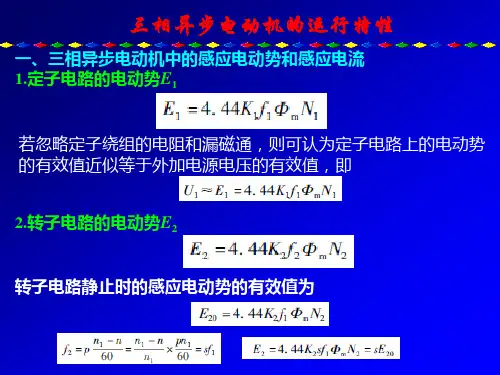
三相异步电动机的机械特性三相异步电动机的机械特性三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性(返回顶部)三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下: 5.1.1机械特性的物理表达式(返回顶部)由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量因数,转子相电流,以及为转子功率与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(电磁转矩与转子相电流),变化不大,,成正比关系,表现为AB 段近似为直线,) ,如,减少近一称为直线部分;当较大时 (半,很小,尽管转子相电流增大,有功电流段,段为曲线不大,使电磁转矩反而减小了,此时表现为段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。
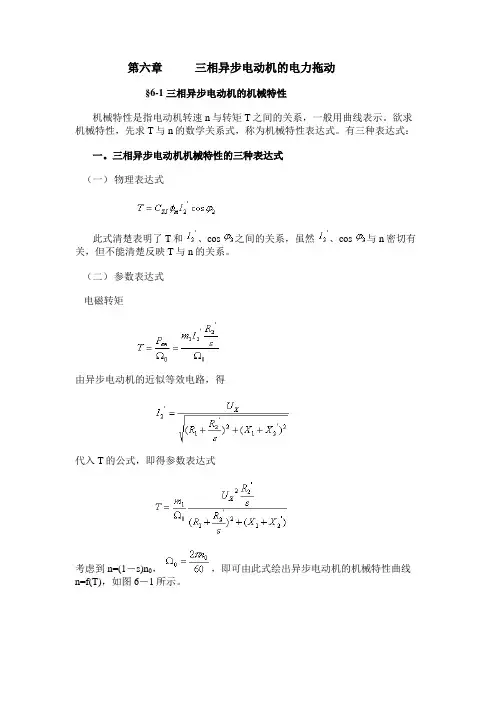
第六章三相异步电动机的电力拖动§6-1 三相异步电动机的机械特性机械特性是指电动机转速n与转矩T之间的关系,一般用曲线表示。
欲求机械特性,先求T与n的数学关系式,称为机械特性表达式。
有三种表达式:一。
三相异步电动机机械特性的三种表达式(一)物理表达式此式清楚表明了T和、cos之间的关系,虽然、cos与n密切有关,但不能清楚反映T与n的关系。
(二)参数表达式电磁转矩由异步电动机的近似等效电路,得代入T的公式,即得参数表达式考虑到n=(1-s)n0,,即可由此式绘出异步电动机的机械特性曲线n=f(T),如图6-1所示。
机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m。
将表达式对s求导,并令,可求出产生最大转矩T m时的转差率S m图6-1机械特性曲线S m称为临界转差率。
代入T的公式则可得T m的公式式中正号对应于电动机状态,负号适用于发电机状态。
一般,故可得近似公式可见:(1)当电动机参数和电源频率不变时,T m ,而S m与U X无关;(2)当电源电压和频率不变时,S m和T m近似与(X1+)成反比;(3)增大转子回路电阻,只能使S m相应增大,而T m保持不变。
最大转矩T m与额定转矩T N之比称为过载倍数,也称过载能力,用K T表示:一般异步电动机K T=1.8~3.0。
对于起重冶金机械用的电动机,可达3.5。
异步电动机起动时,n=0,s=1,代入参数表达式,可得起动转矩的公式由此式可知,对绕线式异步电动机,转子回路串接适当大小的附加电阻,能加大起动转矩T st,从而改善起动性能。
对于鼠笼式电动机,不能用转子串电阻的方法改善起动转矩,在设计电动机时就要根据不同负载的起动要求来考虑起动转矩的大小。
起动转矩T st与额定转矩T N之比,称为起动转矩倍数K st:K st=一般电动机K st=1.0~2.0,对于起重冶金机械用的电动机为2.8~4.0。
(三)实用表达式参数表达式在理论分析时很有用,但定、转子参数在产品目录中找不到,使用起来不方便。
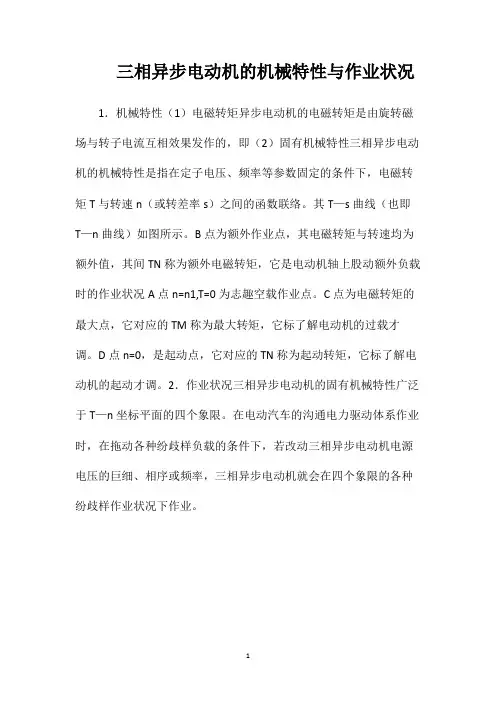
三相异步电动机的机械特性与作业状况1.机械特性(1)电磁转矩异步电动机的电磁转矩是由旋转磁场与转子电流互相效果发作的,即(2)固有机械特性三相异步电动机的机械特性是指在定子电压、频率等参数固定的条件下,电磁转矩T与转速n(或转差率s)之间的函数联络。
其T—s曲线(也即T—n曲线)如图所示。
B点为额外作业点,其电磁转矩与转速均为额外值,其间TN称为额外电磁转矩,它是电动机轴上股动额外负载时的作业状况A点n=n1,T=0为志趣空载作业点。
C点为电磁转矩的最大点,它对应的TM称为最大转矩,它标了解电动机的过载才调。
D点n=0,是起动点,它对应的TN称为起动转矩,它标了解电动机的起动才调。
2.作业状况三相异步电动机的固有机械特性广泛于T—n坐标平面的四个象限。
在电动汽车的沟通电力驱动体系作业时,在拖动各种纷歧样负载的条件下,若改动三相异步电动机电源电压的巨细、相序或频率,三相异步电动机就会在四个象限的各种纷歧样作业状况下作业。
1。
三相异步电动机的机械特性
三相异步电动机的机械特性曲线
三相异步电动机的转速n与转矩T之间的关系n=f(T)称为电动机的机械特性,其曲线如下图所示。
在电动机等速转动时,它的输出转矩必须与阻转矩相平衡,阻转矩主要是机械负载转矩T2。
此外,还包括空载损耗转矩(主要是机械损耗转矩)T0。
由于T0很小,常可忽略,所以:T=T2+T0≈T2
由此可见电动机的电磁转短T近似等于电动机轴上的输出机械转矩T2。
即:
式中P2是电动机轴上输出的机械功率,单位是瓦(W);转矩的单位是牛·米(N.m);转速的单位是转每分(r/rnin)。
功率如用工程上常用的千瓦为单位,则:
若上式中电动机轴上输出的机械功率P2是额定功率P2N,则电动机的输出机械转矩T2即为额定转矩TN。
由转距公式得:
可见,最大转距Tmax与U1的平方成正比,与转子电阻R2无关;sm与R2有关,R2愈大,sm也愈大。
分别见图。