整车电子电气架构演进
- 格式:docx
- 大小:9.37 MB
- 文档页数:24
ECU逐步消亡,“域”向何方?在软件定义汽车的热潮之下与电子电气架构演进的过程中,域控制器是实现整车智能化网联化的核心载体。
各功能性ECU如何逐步被域控取代,真的会被消亡吗?域控制器的出现,整车产业链条中的各个供应商关系与利益将得到重新构建,传统供应商面临的挑战与机遇路在何方,本文结合国内新能源汽车的发展现状及趋势来一一解读。
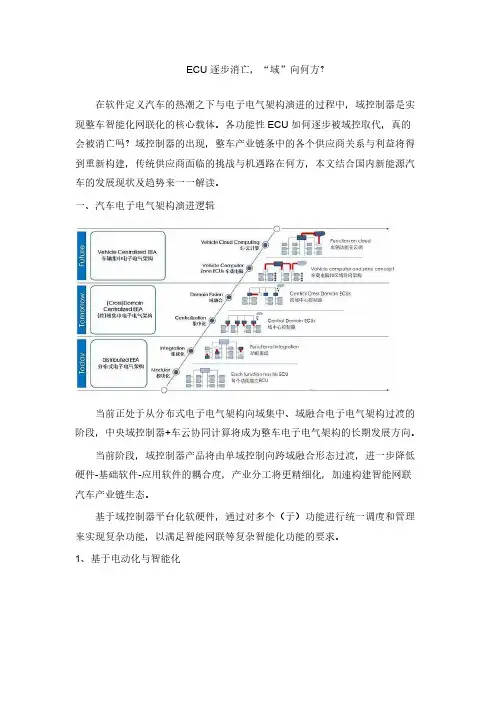
一、汽车电子电气架构演进逻辑当前正处于从分布式电子电气架构向域集中、域融合电子电气架构过渡的阶段,中央域控制器+车云协同计算将成为整车电子电气架构的长期发展方向。
当前阶段,域控制器产品将由单域控制向跨域融合形态过渡,进一步降低硬件-基础软件-应用软件的耦合度,产业分工将更精细化,加速构建智能网联汽车产业链生态。
基于域控制器平台化软硬件,通过对多个(子)功能进行统一调度和管理来实现复杂功能,以满足智能网联等复杂智能化功能的要求。
1、基于电动化与智能化继工业革命以来,每次技术上的发明及革命性创新,换一个角度来看,其实是人类发展赖以生存、智慧结晶的一种考验和体现,也是由量变到质量、整个系统生态链互相促进,甚至倒逼的一个过程。
新能源汽车电动化及智能化也一样,就像当年PC机的发展、手机从功能机到智能机时代,再到自动驾驶智能汽车。
从最基础的操作系统-全栈解耦的基础软件及中间件-越来越标准化的API-丰富的应用层软件-5G技术-物联网-云平台-云计算-高精地图-车路协同等等组合因素,真正的智能汽车,它就是一个万物互相的载体、一个有脑有手有脚的智能移动空间、一个更强大的母生态系统。
这个是为什么这么多资本大力布局各大域控的真正原因,它里面的商业价值想像空间太大。
2、基于集成电路的发展当年手机的功能机向智能机时代的发展,很大成度也是基于“摩尔定律”观点和规律,就像当年刚出PC机时代一样,当时没人想到过做成一个电子书概念吗?我想肯定会有,只是按当时的硬件集成条件做出来实用吗?答案肯定是不实用的,所以说智能硬件的快速发展空间都得益于三次工业革命之后的电子计算机以及集成电路的飞速发展,包括汽车智能化方面也受益于目前集成电路的设计能力和制程工艺,也就出现不同功能特性的MCU、CPU、NPU、DPU、GPU、SoC等芯片,来满足智能汽车所需功能安全和算力特性方面的不同要求。


汽车电子电气架构设计及优化措施随着科技的飞速发展,汽车电子电气系统在汽车中扮演着越来越重要的角色。
汽车电子电气系统不仅涉及到车辆动力、操控和舒适性,更关乎着汽车的智能化、网络化和安全性。
汽车电子电气架构的设计及优化成为了汽车制造商和电子系统供应商需要重点关注的问题。
一、汽车电子电气架构设计1. 传统的汽车电子电气架构传统的汽车电子电气架构主要由独立的控制单元(ECU)组成,各个功能模块独立运行,通信方式多采用CAN总线或LIN总线进行信息交互。
这种结构存在着电缆过多、通信速度慢、维护复杂等问题,难以适应汽车电子系统日益增长的需求。
2. 现代汽车电子电气架构现代汽车电子电气架构逐渐向集成化和分布化方向发展。
通过统一的总线结构和更高效的网络通信方式,将原本独立运行的ECU整合成少量的大型控制单元或者分布式电子系统,以实现信息共享和相互协作。
在整车级别上,通过CAN-FD、FlexRay、Ethernet等高速总线技术,提高车载电子系统的通信速率和数据带宽,满足更复杂的数据传输需求。
3. 汽车电子电气架构的设计原则在进行汽车电子电气架构设计时,需要考虑以下几个原则:- 简化结构:将原本分散的功能模块进行整合,减少电缆数量和系统成本;- 数据共享:通过统一的信息交换总线,实现各个控制单元之间的数据共享和协作,提高整车系统的集成度和性能;- 灵活性:架构要具备一定的扩展性和适应性,能够满足不同车型和功能需求的变化;- 可靠性:确保电子电气系统具备高度的稳定性和可靠性,以满足汽车行驶安全的要求。
1. 单片集成技术单片集成技术是通过将多个功能模块或传感器整合到一个芯片上,以减少成本、空间和功耗。
采用单片集成技术可以有效减少汽车电子系统的体积和数量,简化电缆连接,降低整车电子电气系统的复杂度。
2. AUTOSAR标准应用AUTOSAR(Automotive Open System Architecture)是一种用于汽车电子电气系统开发的标准体系架构。
整车电子电器架构—简述汽车智能化、电子化程度的不断提高,这是大背景,这个大家肯定没异议。
毕竟客户爸爸们现在很喜欢,未来会更喜欢。
这时候来了三批工程师要搞定这个事,他们首先要解决的就是怎么把车上这么多电子设备连接起来,这个设计过程就是电子电器架构所谓「电子电气架构」,简单地说就是把汽车里的传感器、中央处理器、电子电气分配系统、软件硬件通过技术手段整合在一起。
通过这种架构,可以将动力总成、驱动信息以及娱乐信息等,转化为实际的电源分配的物理布局、信号网络、数据网络、诊断、容错、能量管理等电子电气解决方案。
通俗来说,汽车是一个软硬件结合的产物,如果把它比作是一个人,「四个轮子+一个沙发」是身体,电子电气架构就相当于神经系统,负责完成各个部位的连接,统领整个身体的运作,实现特定功能。
首先是一群抱着“机械定义汽车”思维的传统车企工程师开始动作了。
增加电子控制单元(ECU)、增加传感器、增加仪表。
要连接了咋么办。
哪两个东西之间有需求,就加根线呗。
传统的车上电气系统,大多采用点对点的单一通信方式,相互之间很少有联系但随着系统变复杂情况不对了,布线系统变得异常庞大, 一辆传统连接的汽车中,导线总长度可以达到2000多米,电气节点可以达到1500多个。
导致线束材料成本剧增,可靠性骤减。
系统不可持续了。
又来了一群抱着“硬件定义汽车”思维的车企工程师开始寻思了,计算机硬件里不是有总线嘛,能不能借鉴下,大家都先连在几根粗线上。
总线技术可以简单理解为高速公路,路上所有的车(信息)都走一段高速,降低道路(线束)成本。
为简化线路连接,提高可靠性、利于各装置之间的数据共享,以汽车分布式控制系统为基础的车载网络总线技术发展起来了。
汽车总线技术的优点是在统一应用层协议和数据定义的基础上,可以使之成为一个“开放式系统”,具有很强的灵活性。
对于任何遵循上述协议的供应商所生产的控制单元都可轻易添加入该网络系统中或者从网络系统中拆除,几乎不需要做任何硬件和软件的修改,这完全符合现代汽车平台式设计的理念。

高惠民(本刊编委会委员)曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
文/江苏 高惠民汽车电子电气架构的“前世、今生和未来”(一)随着汽车“新四化”—电动化、智能化、网联化、共享化的发展,汽车电子化程度大幅提高,甚至不断向车外延伸,给汽车电子电气架构 (Electrical and Electronic Architecture,EEA)的发展带来了前所未有的挑战。
汽车正逐渐从传统的代步工具演变为集人、车、环境于一体的移动终端、储能单元和数字空间,为用户提供持续快速的功能升级和定制化服务,这也将逐渐成为汽车品牌间差异的重要体现。
因此,面向自动驾驶和网联化应用的下一代汽车,对由计算处理、数据存储、通信交互等组成的系统的架构性能提出了更高的要求。
传统分布式EEA采用单一功能控制器的设计思路,来自不同供应商的电子控制单元 (Electronic Control Unit,ECU)的算力不能协同,从而产生冗余,软硬件高度耦合,难以统一进行维护和实现空中下载 (Over The Air,OTA)。
同时,ECU数量的爆发式增长使通信复杂度大幅提升,也导致线束成本和整车质量增加。
因此,这种架构逐渐难以适应汽车“新四化”的需求。
未来,汽车EEA 的变革性发展势在必行。
基于软件集中化和域控制器的集中式电子电气架构将成为未来汽车电子电气架构(EEA)的发展方向。
一、汽车EEA定义架构的概念最早源于建筑行业,建筑师设计一栋建筑需根据业主的需求和边界条件从不同的角度考虑设计出所需的设计图。
设计图抽象地描述了建筑的某一个特定的方面(如几何关系和电气连接)。
根据这些所需的设计图便可以建造一栋建筑。
后来电气与电子工程协会制定的IEEE 1471-2000 《软件密集型系统体系结构描述推荐规程》 标准中第3.5条款义释了“架构”一词分析:“架构”是用来描述物理功能和信息功能之间的关联以及形式元素之间的分配。

电子电气架构演进汽车电子电气架构(EEA,Electrical/Electronic Architecture)把汽车中的各类传感器、ECU(电子控制单元)、线束拓扑和电子电气分配系统整合在一起完成运算、动力和能量的分配,进而实现整车的各项功能。
如果将汽车比作人体,汽车的机械结构相当于人的骨骼,动力、转向相当于人的四肢,电子电气架构则相当于人的神经系统和大脑,是汽车实现信息交互和复杂操作的关键。
电子电气架构涵盖了车上计算和控制系统的软硬件、传感器、通信网络、电气分配系统等;它通过特定的逻辑和规范将各个子系统有序结合起来,构成实现复杂功能的有机整体。
功能车时代,汽车一旦出厂,用户体验就基本固化;智能车时代,汽车常用常新,千人千面,电子电气架构向集中化演进是这一转变的前提。
从分布式到域控制再到集中式,随着芯片和通信技术的发展,电子电气架构正在发生巨大的变化。
1.1 分布式电子电气架构不堪重负汽车诞生之初是个纯机械产品,车上没有蓄电池,车上的设备亦不需要电力,1927 年博世开发出铅蓄电池,从此车上的电子设备才有了可靠的电力来源。
大规模集成电路的发展让汽车电子得以快速发展,发动机定时点火控制系统、电控燃油喷射系统、自动变速箱控制系统、牵引力控制系统、电控悬架系统、电控座椅、电控车窗、仪表、电控空调、汽车电子稳定控制系统等,逐步成为了汽车不可或缺的组成部分。
汽车电子控制技术逐步发展壮大,为消费者提供了更高性能、更舒适、更安全的出行工具。
早期分布式的电子电气架构下,每个 ECU 通常只负责控制一个单一的功能单元,彼此独立,分别控制着发动机、刹车、车门等部件,常见的有发动机控制器(ECM)、传动系统控制器(TCM)、制动控制器(BCM)、电池管理系统(BMS)等。
各个ECU之间通过CAN (Controller Area Network,控制器域网络)总线或者LIN(Local Interconnect Network,局部互联网络)总线连接在一起,通过厂商预先定义好的通信协议交换信息。
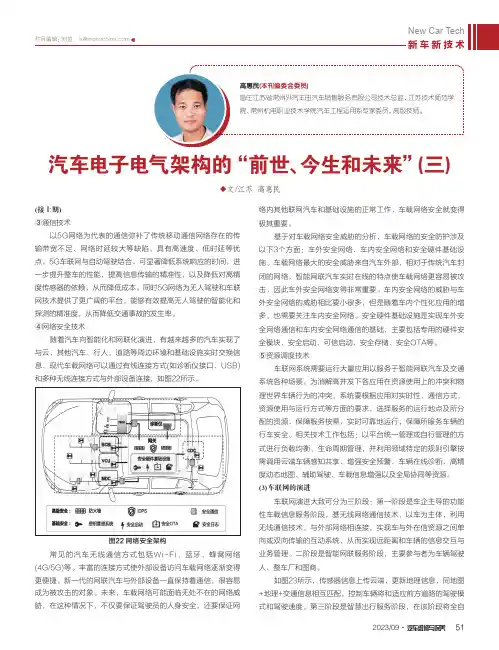
512023/09·汽车维修与保养文/江苏 高惠民汽车电子电气架构的“前世、今生和未来”(三)(接上期)③通信技术以5G网络为代表的通信弥补了传统移动通信网络存在的传输带宽不足、网络时延较大等缺陷,具有高速度、低时延等优点。
5G车联网与自动驾驶结合,可显著降低系统响应的时间,进一步提升整车的性能,提高信息传输的精准性,以及降低对高精度传感器的依赖,从而降低成本。
同时5G网络为无人驾驶和车联网技术提供了更广阔的平台,能够有效提高无人驾驶的智能化和探测的精准度,从而降低交通事故的发生率。
④网络安全技术随着汽车向智能化和网联化演进,有越来越多的汽车实现了与云、其他汽车、行人、道路等周边环境和基础设施实时交换信息。
现代车载网络可以通过有线连接方式(如诊断仪接口、USB)和多种无线连接方式与外部设备连接,如图22所示。
图22 网络安全架构常见的汽车无线通信方式包括Wi-Fi、蓝牙、蜂窝网络(4G/5G)等。
丰富的连接方式使外部设备访问车载网络逐渐变得更便捷。
新一代的网联汽车与外部设备一直保持着通信,很容易成为被攻击的对象。
未来,车载网络可能面临无处不在的网络威胁,在这种情况下,不仅要保证驾驶员的人身安全,还要保证网络内其他联网汽车和基础设施的正常工作,车载网络安全就变得极其重要。
基于对车载网络安全威胁的分析,车载网络的安全防护涉及以下3个方面:车外安全网络、车内安全网络和安全硬件基础设施。
车载网络最大的安全威胁来自汽车外部,相对于传统汽车封闭的网络,智能网联汽车实时在线的特点使车载网络更容易被攻击,因此车外安全网络变得非常重要。
车内安全网络的威胁与车外安全网络的威胁相比要小很多,但是随着车内个性化应用的增多,也需要关注车内安全网络。
安全硬件基础设施是实现车外安全网络通信和车内安全网络通信的基础,主要包括专用的硬件安全模块、安全启动、可信启动、安全存储、安全OTA等。
⑤资源调度技术车联网系统需要运行大量应用以服务于智能网联汽车及交通系统各种场景。

如何看待小鹏的EEA3.0架构的进展在写完之前的电子电气架构的专题以后,我们花时间来谈一下新势力里面电子电气架构的变化,从小鹏开始吧。
一个有趣的事情是,我现在公司同事对G9比较感兴趣,想了解从智能化方面,这套EEA3.0和现有的P7有什么区别。
从整体来看,这一代架构已经进入到中央集中式电子电气架构,采用了中央超算(C-DCU)+区域控制(Z-DCU)硬件架构。
▲图1.小鹏的电子电气架构Part 1Zonal和中央超算在Vector的网站中,有一份报告《软件定义汽车的发展之路小鹏汽车》详细叙述了在2021年EE2.0的一些信息,当初预期的是2023-2025年导入EE3.0超级计算架构:特点是多域融合和车载电脑的创新点;主要的目标是实现自适应场景、交互生态和边沿计算,导入信息安全拓展的功能。
▲图2.小鹏的电子电气架构根据现有的信息来看,小鹏的中央计算平台,主要包含座舱和通信两大部分,这块也是和特斯拉相似,围绕智能化、科技化的大脑去做强性能的超算平台并做了大集成。
核心的部件包括:◎高通最新一代8155P处理器,该芯片采用7纳米制程、8核心配置◎瑞萨第三代旗舰MCU,我查了下可能是第三代RXv3 CPU内核的MCU里面高配置的核心从功能配置来看,这个中央超算包含原有的仪表显示、中控和副驾信息娱乐功能,然后进行跨域融合包括中央网关、车外声音控制、外部灯语控制、氛围灯控制和泊车辅助灯功能。
在这个中央超算的通信功能中,把原有EE2.0的架构加进去了,如下图3所示:2路千兆以太网1000Base-T1,用来连接XPU4.x和5G智能天线;6路百兆以太网,其中2路连接左右的LDCU和RDCU,有一路以太网诊断和4路CAN FD和CAN通信;底盘CAN和LDCU和RDCU的私有通信用了CANFD、bodyCAN和PT CAN因为要兼容所以才用了高速CAN (500kbps)。
备注:PT CAN主要迁就之前的BMS还有兼容性的控制器,我估计到2023年不断优化以后也会升级。
汽车电气架构发展趋势摘要:汽车电子作为衡量汽车性能的重要指标,汽车电气架构正日益成为汽车制造商改进的重要领域之一。
并且随着高科技技术的快速发展,特别是人工智能学习技术的大规模应用,车辆娱乐、驾驶辅助等系统将越来越复杂,所需控制器的数量和容量将呈几何倍数增长,这对车辆电气架构提出了新的要求。
关键词:汽车电器;电气架构;发展趋势1汽车电子电气架构系统基本需求分析1.1汽车电子电气架构系统基本要求概述就现代汽车而言,科学的电子电气架构设计不仅可以有效提高汽车的综合性能和舒适性,还可以达到控制和降低汽车生产成本和总重量的目的。
因此,加强汽车电子电气架构设计具有重要的现实意义。
为了进一步提高汽车电子电气架构的科学合理设计,在正式设计工作之前,相关人员必须做好汽车电子电气系统的需求分析,搭建相应的电子电气架构整体平台,并在此基础上实现对汽车电子电气系统的分析和研究。
一般来说,汽车电子电气架构系统的要求体现在以下两个方面:一方面,分析与电子电气架构系统相关的操作需求。
本部分分析的基本目的是充分满足用户对系统的所有外部要求,以确保在汽车电子电气架构的开发和设计过程中充分满足相关外部要求。
具体而言,汽车电子电气架构可操作性要求主要包括以下内容。
首先,相关人员需要分析电子电气架构系统在各种操作环境中的实际需求;其次,分析系统性能需求,并做好量化工作。
同时,这部分工作的根本目的是分析和验证能够满足用户功能需求的实际标准水平。
再次,工作人员应通过虚拟实例分析的方法,科学地分析某些特殊使用情况下的潜在需求和功能。
最后,综合制定了电子电气系统的功能需求,以确定每个功能需求的实际运行状态,并强调了硬件故障状态下运行状态的确定。
另一方面,分析了电子电气架构的功能需求。
与电子电气架构的操作需求分析相比,功能需求分析更侧重于系统的内部需求分析,以更好地满足用户的用车需求。
因此,加强电子电气体系结构的功能分析也具有重要的现实意义。
鉴于电子电气架构功能分析的特殊要求,当无法确定需求的正确性和完整性时,相关人员应建立功能需求模型进行分析,以确定外部的正确性与完整性。
汽车电子电气架构发展演进1. 概述电子技术在汽车系统上的应用是保证车辆新功能的硬件基础。
电子电气设备的应用为今天的汽车提供了更高的性能,更舒适的驾驶体验,更高的安全水平及更低的尾气排放。
随着计算机和网络技术的飞速发展,汽车工业开始了智能网联化发展,这要求汽车电子电气由提供非重要功能演变到辅助驾驶,从感知和驱动等系统执行器件演变为高性能、高负荷的处理模块。
这表明电子电气在汽车系统中扮演着越来越重要的角色,开始处理越来越复杂的功能性问题。
将各类传感器、线束、控制器、各个系统和软硬件有机的结合起来,构成集成化、功能化、智能化的电子电气系统已经成为必然趋势。
随着汽车智能化的发展,汽车上车载电子元器件和电子控制单元的数量增加,汽车功能的越来越多、车载设备间通讯网络越来越复杂,对车载设备的性能要求越来越高。
为了适应智能网联汽车的发展,对电子电气架构的发展也提出了新的要求。
2. 电子电气架构发展汽车电子电气系统架构的发展,由20世纪80年代最初的分布式架构逐渐发展为当前的高度智能和融合化(如图1所示)。
图1 汽车电子电气架构演变示意发展初期,不同的电子控制单元(ECU)通过等效网络接口通过通信链路连接,实现有效通信。
而随着技术的发展,不同电子控制单元(ECU)合并以及硬件系统的集成化设计,使得汽车电子电气架构逐渐过渡到模块化和集成化,促进了不同电子控制单元(ECU)之间的相互通信和融合,这种变化趋势随着车辆智能网联化的需要会得到进一步的发展。
而且,大数据和互联网技术的愈发成熟,使得人-车-环境多维度融合交互通信称为可能,使用大数据云处理器控制车辆也逐渐成为可能。
车辆智能网联化发展,带来车辆自身个体复杂程度的增加、车辆各系统之间的交互通信增加、车辆之间的互联通信增加。
这对于电子电气的通信能力及架构的延展性提出更高的要求。
车载电子电气架构的设计和搭建需要考虑的因素就更多。
例如实时性需求、诊断服务请求等以整车功能导向为目标的要求。
智能网联汽车电子电气架构及域控制器技术智能网联车是当前汽车行业的热门领域之一,它结合了智能化和网联化技术,为汽车带来了更多的功能和便利,提升了安全性和乘坐体验。
在智能网联汽车中,电子电气架构和域控制器技术是实现车辆智能化、网联化的关键。
电子电气架构是指车辆中电子系统和电气系统的整体设计和布局。
在传统汽车中,电子系统和电气系统都是相对独立的,各个系统之间通信较少。
而在智能网联汽车中,电子系统和电气系统的整合和互联变得更加重要。
智能网联汽车的电子电气架构需要满足以下几个关键要求:1.强大的计算和处理能力:智能网联汽车需要实时处理大量的数据,包括传感器数据、通信数据等。
因此,电子电气架构需要具备强大的计算和处理能力,以满足车辆对数据的快速处理和分析需求。
2.高度集成的硬件平台:智能网联汽车的电子电气系统需要集成多个硬件模块,包括处理器、传感器、通信模块等。
这些硬件模块需要具备高度集成的能力,以减小系统的体积和功耗,并提高系统的稳定性和可靠性。
3.灵活的网络通信能力:智能网联汽车中的各个电子模块需要进行实时的数据通信,以实现各种功能和应用。
因此,电子电气架构需要具备灵活的网络通信能力,以满足车辆内部各个模块之间的通信需求,并与外部网络进行连接。
为了满足智能网联汽车的电子电气架构需求,域控制器技术应运而生。
域控制器是指将不同的电子功能模块集成到一个控制器中,以实现模块之间的实时通信和协同工作。
域控制器技术可以帮助车辆实现以下几个方面的功能:1.数据集中处理和分配:域控制器可以将各个电子模块的数据进行集中处理和分配,避免了数据冗余和重复计算,提高了系统的运行效率。
2.实时通信和协同工作:域控制器可以对车辆中的各个电子模块进行实时通信和协同工作,以实现各种功能和应用,如驾驶辅助、智能语音控制等。
3.弹性的系统扩展和升级:域控制器可以支持系统的弹性扩展和升级,通过增加或替换控制器中的模块,实现对系统功能和性能的灵活调整。
电动汽车整车电子电气架构开发流程英文回答:Electric Vehicle (EV) Whole Vehicle Electronic and Electrical Architecture Development Process.The development of an electric vehicle's (EV) whole vehicle electronic and electrical (E/E) architecture is a complex and challenging process that requires a deep understanding of both the electrical and mechanical systems of the vehicle. The following is a general overview of the EV E/E architecture development process:1. Define the Vehicle Requirements: The first step in the E/E architecture development process is to define the requirements of the vehicle. This includes identifying the vehicle's performance, safety, and reliability goals, as well as the specific features and functions that the vehicle will need to have.2. Develop the Functional Architecture: Once the vehicle requirements have been defined, the next step is to develop the functional architecture of the E/E system. This involves identifying the major functions that the E/E system will need to perform, as well as the interactions between these functions.3. Select the Electrical Components: The next step is to select the electrical components that will be used in the E/E system. This includes selecting the batteries, motors, inverters, and other electrical components thatwill be needed to power and control the vehicle.4. Design the Electrical Wiring: Once the electrical components have been selected, the next step is to design the electrical wiring that will connect the components together. This includes routing the wires, selecting the appropriate connectors, and ensuring that the wiring is protected from damage.5. Test and Validate the System: Once the E/E system has been designed, the next step is to test and validatethe system. This involves testing the system to ensure that it meets the vehicle's requirements and that it is safe and reliable.6. Integrate the System with the Vehicle: The final step in the E/E architecture development process is to integrate the system with the vehicle. This involves installing the E/E system in the vehicle and connecting it to the other systems of the vehicle.中文回答:电动汽车整车电子电气架构开发流程。
汽车电子电气架构开发随着汽车科技的高速发展,汽车的智能化已成为不可逆转的趋势。
而汽车电子电气架构(E/E Architecture)则是实现汽车智能化的重要基础。
本文将探讨汽车电子电气架构开发的过程、方法以及目标。
汽车电子电气架构开发的过程汽车电子电气架构开发,需要经过以下几个步骤:第一步,确定需求。
开发前需要首先确定汽车所需电气电子系统,以及这些系统各自的要求。
同时考虑到不同车型的差异、可升级性、安全性等方面。
第二步,设计系统。
在确定汽车的需求后,需要根据需求设计系统的整体框架。
该框架要包括各个功能模块、硬件连接方式、数据传输协议、接口标准等信息。
第三步,确定硬件方案。
在电子电气架构开发中,硬件信息的确定极为重要。
确定硬件信息的流程包括评估设计的可行性、性能指标、强健性、抗干扰性等。
第四步,编写软件程序。
在确定硬件方案后,需要编写相应的软件程序。
程序低级别应与硬件方案中的芯片驱动器完全兼容,高级别则要根据电气电子架构相应的嵌入式系统极具特色的设计要素进行设计。
第五步,测试和验证。
完成以上工作后,就需要进行系统的测试和验证。
测试过程中的重点是确保汽车电子电气架构的稳定性、可靠性和安全性。
测试可以在仿真环境、试验场等环境中进行。
汽车电子电气架构开发的方法汽车电子电气架构的开发方法有很多种,以下是几种较为常见的方法:首先是正向设计方法。
正向设计是指由需求出发,首先确定汽车的功能要求,然后确定哪些电气电子系统可以满足这些要求,接着设计每个系统的架构,最后进行连带和交互的设计。
第二是反向设计方法。
反向设计法是指由硬件出发,依次将硬件连通,直到最后形成了完整的电子电气架构体系。
这种方法常常用于对已有汽车进行升级和改造。
第三是模块化设计方法。
模块化设计法是指将整个电子电气系统按照模块拆分,然后独立开发不同模块,最后将模块集成在一起形成完整汽车电子电气架构。
这种方法好处在于可以更加快速,有效地进行分配和管理系统的任务。
汽车EE架构不断升级,华为CCA架构指引未来演变趋势⼀、ADAS 功能升级导致算⼒需求提升驾驶辅助功能快速提升,分布式架构向“功能域”集中式架构演进成为趋势。
传统分布式 ECU 在汽车电⽓化、智能化时代因为驾驶辅助功能快速的提升,⾯临着巨⼤的挑战。
1)各个 ECU 之间算⼒⽆法协同,相互冗余,产⽣极⼤浪费;2)⼤量的嵌⼊式OS 及应⽤代码由不同的 Tier 1 提供,语⾔和编程风格迥异,导致难以统⼀维护和 OTA升级;3)分布式架构需要⼤量内部通信,导致线束成本增加并加⼤装配难度。
因此,分布式架构向“功能域”集中式架构演进成为趋势。
汽车&不同⾏业软件代码量/⾏未来汽车软件代码量变化趋势/⾏⼆、 “软件定义汽车”背景下,整车 OTA 需要 SOA 架构升级相较于传统汽车,整车 OTA 为汽车注⼊新的活⼒。
在“软件定义汽车”时代,OTA(Over The Air)空中下载能够满⾜智能汽车软件快速迭代的需求,避免传统汽车每次更新都需要去 4S 店,从⽽导致效率低下的问题。
通过它可以不断给客户开启新的功能,不断优化产品体验,吸引客户。
传统分布式 ECU 软硬件架构,整车 OTA 效率低下。
在传统的分布式 ECU 架构下,有以下⼏个问题:1)ECU 众多,且由不同的供应商进⾏开发,软件框架不同,外部开发者难以对 ECU 进⾏编程更新。
2)通过 CAN/LIN 总线进⾏通信,信号收发关系和路由信息静态固定,各 ECU 周期性发出各种信号,通过⽹关进⾏转发,若更新信号配置,需要同步修改⽹关配置。
3)控制器之间信号嵌套,单个控制器升级需要将所有信号相关控制器全部升级,⼯作量指数上升。
分布式 E/E 架构⾯临 OTA 困难为实现“软件定义汽车”,SOA 架构成为新的趋势。
SOA(Service-Oriented Architecture)⾯向服务架构,是⼀种架构设计思想,将应⽤程序的不同功能单元(称为服务)通过这些服务之间定义良好的接⼝和契约联系起来。
汽车电子电气架构技术分析报告2020年7月1. 汽车电子电气架构:汽车的中枢神经1.1. 汽车电子电气架构EEA:电子电气设计的整体解决方案汽车电子电气架构 E/E 架构(EEA, Electrical/Electronic Architecture)由德尔福公司提出。
汽车电子电气架构将传感器、ECU、线束、电子电气分配系统整合,实现了汽车整体的配置和功能的实现。
E/E 架构通过物理层面的布置,对车身信息进行转化和处理,为汽车电子电气设计提供了整体的解决方案。
车上每一个功能都有一个最基础的电气架构作为支撑,包括供电、控制、执行、反馈等回路,而整车的电子电气架构就是这些基础电气架构的有机组合。
表1:E/E架构为汽车电子电气设计提供了整体的解决方案物理层面车身信息涉及部件电源分配、信号网络、数据网络、诊断、容错、能量管理动力总成、驱动信息、娱乐信息等等软件层、控制单元层、传感器、电力电子等数据来源:市场研究部电子电气架构市场规模较大,ECU/DCU 占比最高。
电子电气架构设计组件包括软件、ECU/DCU、集成验证、动力系统、传感器以及其他包括线束在内的电气器件。
2020 年软件与电子电气架构市场规模 2380 亿美元,ECU/DCU 市场规模 920 亿美元,占比 38.7%。
表2:ECU/DCU 在各组件中市场规模占比最高(单位:亿美元)组件软件2020年组件市场规模200920130200630300ECU/DCU集成、验证动力系统其它电子器件传感器数据来源:麦肯锡《汽车软件与电子 2030》,市场研究部1.2. 大部分车企仍处于分布式架构阶段目前大部分车企仍处于分布式架构阶段,小部分车企出现分域的概念。
目前整车的控制体系以电控单元ECU 为核心,每个功能对应一个或多个 ECU,比如加热装置 ECU、多媒体系统 ECU 等等。
电子控制单元ECU( Electronic Control Unit)是汽车专用微机控制器。
整车电子电气架构演进什么是汽车电子电气架构?电子电气架构:EEA,Electrical/Electronic Architecture根据百度百科的解释:“汽车电子电气架构是集合了汽车的电子电气系统原理设计、中央电器盒设计、连接器设计、电子电气分配系统等设计为一体的整车电子电气解决方案”的概念,由德尔福(DELPHI)首先提出。
具体就是在功能需求、法规和设计要求等特定约束下,通过对功能、性能、成本和装配等各方面进行分析,将动力总成、传动系统、信息娱乐系统等信息转化为实际的电源分配的物理布局、信号网络、数据网络、诊断、电源管理等电子电气解决方案(如图1所示)。
图1 整车电子电气架构与功能域EEA不仅在汽车中经常使用,也在航电系统、工业自动化以及国防系统等其他控制系统中有广泛应用。
EEA的开发包括需求定义、逻辑功能架构设计、软件/服务架构设计、硬件架构设计、线束设计等不同层面的开发活动,如图2和图3。
图2 基于PREEvision的EEA开发模式图3 基于PREEvision的EEA设计电子电气架构演进随着移动互联网在消费者生活领域的广泛渗透,人们的生活习惯和价值取向开始转移。
伴随互联网尤其是移动互联网的飞速发展,人类的生产生活重心逐步转移至虚拟的赛博空间(Cyberspace)中。
尤其是2007年苹果创造出智能手机这种便携化的智能终端后,不论是网上购物、网上娱乐、网络社交、移动支付、网络咨询,还是在线政务、线上办公、在线教育等生产生活活动,都在逐步地向赛博空间转移。
未来还将有更多的老百姓被转化为网民,并更多地“生活”在赛博空间中。
人类生产生活逐步向赛博空间转移的过程中,也会对PC、平板电脑、手机或其他智能终端等消费电子产品的使用习惯和喜好向其他人类生产生活工具上转移。
一旦其他工具具备了PC、平板或手机相应特征,就会形成市场需求,因为人类又多了一种智能终端能够与赛博空间进行连接,熟悉的、便利的互联网应用又可以在新工具和设备上运行,方便了生活,提高了生产效率。
汽车的驾驶自动化(Drving Automatization)趋势在很久很久以前就已经产生了。
了解下Global OEM的Demo项目,甚至上知网搜索下相关论文,就会发现ADAS是多么古老的一种技术了,远远早于近几年的人工智能热潮。
但是,随着特斯拉Model S、Model X等一系列车型的推出,使人们对汽车智能化(Intelligence)有了新的期待。
仔细品一下Automatization和Intelligence这两个单词的含义,个人认为还是Intelligence含义更丰富。
因此,汽车智能化,不仅包括了驾驶自动化,也包括智能网联、智能交互(以及后续的智能座舱)等数字化和信息化趋势。
也因为特斯拉等新玩家的创新性车型的推出,人们开始对汽车有了以下这种强烈的预期(图4),即智能汽车。
所谓的智能汽车,基本是要对标着手机、PC这种数字化/信息化的半导体设备去了。
图4 智能汽车:拥有四个轮子的大型智能手机既然老百姓的需求是“智能汽车”,那么具备“智能汽车”特征的车型就会有更多市场需求,客户也更加愿意买单。
那么表征智能汽车的核心智能化功能都有哪些呢?按照汽车智能化的趋势(即CASE,Connected互联、Autonomous自动、Sharing共享、Electric电动),智能驾驶、智能座舱、智能网联应该就是终端用户期待的功能。
以上的这些功能,相对于曾经汽车电子的功能,复杂度有很大提升。
为了实现以上复杂功能,我们需要软件的SOA架构,我们需要基于服务的通信,我们需要满足车规的RTOS(实时操作系统),我们需要FOTA (固件空中升级),总之,我们需要一台软硬件解耦的、能够用软件来定义功能的汽车。
这就需要一个大大的前提——集中化的EEA。
这又是为什么呢?先进行粗略分析。
首先,看看当前的整车EEA现状:a) 电子单元:众多分散的运算&控制单元;b) 电气单元:发动机、伺服电机、电磁阀等; c) 执行机构:机械、液压、气门机构... 也就是说,当前的汽车只是一台相对精密的机电一体化设备(Mechatronics,隶属于控制工程范畴,还需进一步电气化),而非数字化/信息化的半导体设备(ICT范畴),距离智能手机有些遥远。
但是消费者目前想要的是一台像手机一样的车(智能终端、电子设备)。
究竟如何才能使汽车朝向一台大型的“电子”设备转型呢?答案是继续提高电气化程度,即电子电气架构从分布式向集中式发展,直到形成真正的车载中央计算机。
接下来,分为两个具体维度进行分析:2.2.1 整车设计/制造维度从整车的设计/制造维度讲,若汽车继续按照当前的分布式架构发展,且不说算力是否满足,单就车辆物理安装空间上讲就有问题。
可能会导致难以布置更多ECU和更多线束;更多的ECU和更多的线束,势必导致组装困难,只能继续依靠人工。
伊隆马斯克也曾为过度依赖自动化产线而焦头烂额,之后也曾发誓要对汽车进行“线束革命”,说明过多复杂线束和过多ECU的安装会严重影响产线的高度自动化。
而集中式电子电气架构,能够逐步平抑ECU和线束的增长趋势,甚至到达某个时间节点之后,能够促进大幅减少ECU和线束用量,降低EEA 网络拓的扑复杂度。
倘若确实能够减少ECU数量和线束用量,也就能够降低电子电气系统的重量,对整车的轻量化设计目标也有帮助。
电子电气架构的集中化,就意味着单个ECU的“扩容”,以及多个ECU的“合并”。
换句话说,ECU要越来越大型化,算力要高,功耗/成本还都需要进行控制。
结论是什么?需要大型的、高算力的、制程小的(意味着低功耗)车载SOC芯片。
为什么要用SOC芯片?因为通过堆大量算力低的芯片做控制器不可行;芯片多,集成度低,PCB板以及域控制器太大不好布置(想象一下Demo车的后备箱塞满工控机的场景),功耗和成本也高。
总之,集成化程度高是刚需,SOC芯片又能够较好的解决这个问题。
各个芯片玩家疯狂扩大SOC规模(从英伟达Xavier和ORIN,到特斯拉FSD芯片,甚至Mobileye提供EyeQ5的开放方案),也是为了解决这个痛点。
所谓“规模”,实质是指算力,DMIPS/TFLOPS/TOPS都要足够高。
有了强大而“趁手”的芯片,就能“攒”出来满足集中化要求的ECU了。
不管是叫DCU(域控制器),还是HPC(高性能计算机),甚至是VCC(车载中央计算机),也不过是表征一下ECU有多大规模。
综上论述,从整车维度讲,大型SOC芯片(以及基于大型SOC芯片构建的大型域控制器/高性能计算机)和先进线束都是集中化EEA的关键基础技术。
2.2.2 价格/成本维度不管是什么产品,到了只拼价格/成本的竞赛,基本意味着没有太大创新了。
因为创新是有代价的,创新是很“贵”的一件事,因此我相信集中化EEA也会遵循发展的常识。
最开始是功能导向,为了实现某些关键功能的落地而不惜代价,价格/因素会较少考虑;然后是性价比导向,关键功能实现了,为了体现性价比,就会把手伸到“别人的地盘”,即几个大型ECU通过吸收其他专用小型ECU的功能(把小型ECU从车上干掉,平抑整个系统的成本),通过集成更多功能来保持“虽然贵,但是功能也强大”的性价比优势;最后是成本导向,大型ECU 的功能scope确定了、“扩张边界”也确定了,就得比价格/成本了。
然后不停的往复循环以上逻辑。
当前的智能驾驶域,在L0-L2已经相对成熟,因为该级别的各个ADAS功能相对确定,因此边界已经清晰了,那么开始打“性价比”牌和赤裸裸的“价格”牌也就不奇怪了。
而L2+到L3还在比拼功能落地,那么价格因素就可以适当妥协(当然不能无限妥协,毕竟做产品归根结底是做生意,钱永远是最重要的)。
总之,若把智能驾驶、智能座舱的复杂功能作为必定要实现的“既定事实”看的话,集中化EEA还是“省钱”的。
因为,即便假设分布式EEA从技术角度能够实现复杂功能,成本也会非常高。
以上,也可以回答作者作为一个做量产ADAS/AD的技术人员,为什么要关注整车电子电气架构演进的原因。
因为关注EEA的进化,实质是关注前装量产高级别自动驾驶功能的落地节奏,以及汽车数字化、软件化的推进节奏!集中化EEA根据下图的描述,一般EEA从分布式到中央集中式需要经历三个阶段,即分布式-域集中-中央集中。
图5 电子电气架构演进的三个阶段集中式EEA类型4.1 三域EEA(域集中式EEA)三域,顾名思义,是指车辆控制域、智能驾驶域和智能座舱域。
其中,车辆控制域基本将原动力域、底盘域和车身域等传统车辆域进行了整合(整合更多是系统层面的概念,并不一定是硬件层面合并,因此并不是说这个域中其他ECU就不存在,或者就减少了);智能驾驶域和智能座舱域则专注实现汽车的智能化和网联化。
涉及的零部件主要有4类,车控域控制器(VDC,Vehicle Domain Controller)、智能驾驶域控制器(ADC,ADAS\AD Domain Controller)、智能座舱域控制器(CDC,Cockpit Domain Controller)以及若干高性能网关,其中:•VDC作为Private DCU,负责整车控制,实时性安全性要求高.•ADC作为Public DCU,负责自动驾驶相关感知、规划、决策相关功能的实现;•CDC作为Public DCU,负责HMI交互和智能座舱相关(甚至整合T-Box)功能的实现.三域EEA算是非常彻底的域集中式EEA。
三域EEA常见的实践包括:4.1.1 大众MEB平台的E3架构大众的MEB平台(首款车ID3)的E3架构,即由3个车辆应用服务器(ICAS,即In-Car Application Server)组成的域集中式EEA,具体包括:车辆控制服务器ICAS1、智能驾驶服务器ICAS2和信息娱乐服务器ICAS3(如图6所示)。
通过ICAS这种大型域控制器,逐步得将本域的其他ECU的软件功能(如智能传感器Smart Sensor的一些功能Applications,以及基础软件Basic Services)逐步向ICAS中转移,直到其他ECU(本域的传感器和执行系统)慢慢被合并。
图6 大众MEB平台的E3架构示意图E3的骨干网采用车载以太网实现,如下图所示。
由图可知,车控域控制器需要更多DMIPS 算力,因此除了提供MCU(Micro Controller Unit)外,还有一个多核ARM作为MPU (Micro Processor Unit)。
ICAS1作为Conti提供的方案,不知道这颗MPU会采用谁家的芯片。
图7 E3架构中车控域控制器(ICAS1)与智能座舱域控制器(ICAS3)的连接示意图4.1.2 宝马iNEXT车型的三域架构宝马iNEXT车型的EEA也包括3个域控制器,分别是BDC(body Domain Controller,对应VDC),SAS(即ADC)以及MGU(Media Graphics Unit,对应CDC)。