(整理)透平压缩机机组的横向振动和扭转振动分析CAE
- 格式:doc
- 大小:664.50 KB
- 文档页数:27

透平压缩机常见振动故障及解决对策作者:刘瑶韩为韬甘兴泉来源:《大东方》2019年第02期摘要:透平压缩机作为一种叶片式旋转机械,在工业生产中已经得到了广泛运用。
但是,作为旋转式机械,振动故障非常常见,透平压缩机也是如此。
震动故障的出现会对透平压缩机的正产运作造成影响,因此,本文对透平压缩机常见的故障进行了分析,并提出了一些解决对策,仅供参考。
关键词;压缩机;振动故障;解决对策1 透平压缩机故障概述透平压缩机的振动会产生噪声、加快磨损、缩短机器的使用寿命和降低工作效率,严重的振动会使机器部件断裂、转子失稳,造成重大事故。
为此,对透平压缩机振动原因的分析十分必要,找出并消除振动故障,延长机组使用寿命,降低企业财产损失,同时可以为透平压缩机转子系统的设计、制造和运行管理提供参考。
2 诊断方法2.1不平衡故障转子不平衡是压缩机最常见的振动故障,转子或多或少总是存在不平衡的,只是不平衡只能控制在标准范围内,超过标准就是故障,它在各类转子故障中占很高的比例。
不平衡有多种情况,有力不平衡、偶不平衡和动不平衡等。
磨损和结垢是产生转子不平衡的两大主要原因。
转子不平衡时,转子的质心与转子几何轴心不重合,存在着一个偏心矩,转子转动时偏心矩将会产生离心力、离心力矩或两者兼而有之。
不平衡振动的频率与转速相一致,振动值的大小与转速相关。
2.1.1 不平衡故障的振动诊断振动大小与转速平方成正比;振动波形接近正弦波;轴心轨迹近似圆形;振动以径向为主,一般水平方向幅值大于垂直方向的幅值;力不平衡的振动相位稳定,两个轴承处相位接近。
同一轴承垂直水平方向的相位相差接近900度,两个轴承处相位相差180°。
悬臂转子的不平衡在轴向和径向均出现较大振动;启动过程振动大,且具有再现性;初定速振动大,且振值基本稳定。
一般来说,如果单纯的水平方向振值较大,可以初步判断是转子不平衡故障;转子轴弯曲时,径向振动大,轴向同时也有较大的工频振动。
收稿时间:2000-11-08作者简介:于慧(1962-),女,辽宁本溪人,本溪冶金高等专科学校机械系讲师.文章编号:1008-3723(2001)02-0023-03D480透平压缩机振动原因分析于 慧(本溪冶金高等专科学校机械系,辽宁本溪117022)摘 要:针对D480透平压缩机振动原因进行分析并提出解决该问题的方案。
关键词:转子;振动;平衡中图分类号:TH 45 文献标识码:A D480透平压缩机运行状况总体良好,但由于机组振动不断加剧,以致于造成前轴承轴瓦巴氏合金振脱,堵塞油路,轴承烧坏报废。
由于振动,造成主机与增速箱联轴器处轴头断裂,使生产不能连续稳定运行。
为使机组能长周期稳定运行,我们在本溪市化肥厂对机组进行了测试,分析,查找振源,并进行了修整与改进,取得了良好的效果。
1 造成D480透平压缩机严重振动的主要原因1.1 转子不平衡 我们在分析测定压缩机振动时发现,造成振动的主要原因是转子不平衡。
虽然转子在出厂时已校验了动、静平衡,但随着转子的使用,转子不可避免地会出现被冲刷、腐蚀、磨损、零件松动等现象,转子原来的平衡就被破坏了,从而产生静不平衡,以致于造成零件损坏,机组无法运行。
1.2 联轴器对中不良 机组各转子之间的联轴器对中超差或齿式联轴器内外齿面的接触情况发生了变化也会产生振动。
打开齿式联轴器检查找正时,发现主机和增速箱对中的同心度径向0.10mm ,轴向0.08mm ,而允许值为径向0.04mm ,轴向0.02mm 。
开机运行一段时间后振动加剧,停机打开主机前后轴承发现,轴瓦巴氏合金已破碎且几乎全部脱落。
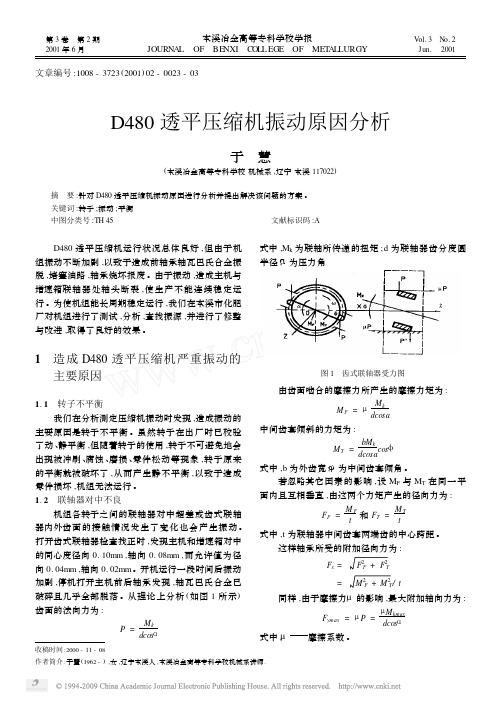
从理论上分析(如图1所示)齿面的法向力为:P =M k dcosα式中,M k 为联轴所传递的扭矩;d 为联轴器齿分度圆半径;α为压力角图1 齿式联轴器受力图由齿面啮合的摩擦力所产生的摩擦力矩为:M F =μM kdcosa中间齿套倾斜的力矩为:M T =bM kdcosacosφ式中,b 为外齿宽;φ为中间齿套倾角。


透平空气压缩机机体振动故障的处理毛新玲(新疆八一钢铁集团公司能源中心)摘 要 关键词 对 G BD 52/6Q 型透平空气压缩机机体振动故障原因进行分析, 介绍整个检修过程及存在的问题。
透平空气压缩机 振动 处理概述振动加剧, 声音异常, 于 1999 年 12 月 13 日解体 3# 空压机, 提前进行中修。
经过连续 6 天 14 小时的检 修, 于 1999 年 12 月 19 日试机投入运行。
1 八钢能源中心制氧分厂 1500m 3/h 制氧机主要 配套的透平压缩机共 3 台, 由日本神户生产。
该机的 流量为 10 000m 3 /h , 电机功率 1 250k W , 电机转速 为 1 480 r /m i n 。
3#透平空气压缩机机体于 1999 年 4 月开始出现振动大的现象, 但因生产需要无法停机检修, 暂时 维持运行, 决定于 2000 年再进行大中修。
后因机体解体检查及测定2 1999 年 12 月 13 日进行了透平空压气解体检查, 并进行了原始数据的测量。
3#透平空压机主机设备简图如图 1 所示。
1. 低速轴前滑动轴承;2. 低速轴后滑动轴承;3. 高速轴前滑动轴承;4. 高速轴后滑动轴承;5. 转子前滑动轴承;6. 转子后滑动轴承;7. 增速器;8. 主油泵;9. 低速轴; 10. 叶轮; 11. 转子; 12. 转子推力盘; 13. 高速轴图 1 3# 透平空压机主机设备简图压缩机解体检查测出的原始数据见表 1。
通过全面检查, 发现电机侧转子轴瓦和吸入侧 上轴瓦巴氏合金已破损掉落。
电机侧高速轴瓦下轴 瓦磨损严重, 轴瓦间隙超标, 转子轴颈严重磨损, 其 上划出许多凹槽, 椭圆度已超出技术要求范围以外, 均已不能再继续使用。
从转子 2 付轴瓦的上瓦巴氏合金破损、挤压现象, 可推断出转子的水平度发生了变化。
即转子吸入 侧高于排出侧, 后经高度尺测量, 吸入侧比排出侧高 出 0. 10mm , 转子发生了翘头。

透平压缩机轴振动值高的原因分析与处理汪达军【摘要】重点介绍了造成透平压缩机轴振动值高的5种原因,通过对原因的分析和研究,提出相应的措施在实践中予以应用,达到减小透平压缩机轴振动和对轴振动快速诊断和处理的目的,为透平压缩机安装及维修管理提供了指导性意见和依据.【期刊名称】《机械研究与应用》【年(卷),期】2012(000)003【总页数】5页(P151-154,156)【关键词】透平压缩机;轴振动;处理;措施【作者】汪达军【作者单位】山东石横特钢集团有限公司装备部,山东肥城271612【正文语种】中文【中图分类】TH121 引言透平压缩机结构复杂零部件较多,其运行过程中轴振动值高的故障很常见,振动形式和原因也多种多样。
在设备运转过程中无法直观判断振源所在,是多年来存在的一个较难解决的问题。
下面根据轴振动表现形式的不同从受迫振动、共振、制造装配、脉动、应力五个方面进行分类分析与总结。
2 受迫振动造成轴振动的原因分析(1)电机振动过大主电机振动过大时,振动会传递给压缩机从而影响转子运行轨迹,引起压缩机轴振动。
造成主电机振动过大的原因主要有以下几点:转子弯曲、平衡块脱落或产生位移、转子上零件松动;滑动轴承的间隙及紧力不合适;下瓦的接触位置、接触面积、接触点异常;转子与定子间气隙超差;前后轴承中心线错位等。
(2)轴器不合格目前,透平压缩机所采用的联轴器多为膜片式联轴器,此种结构的联轴器对中心距的偏差及对中度偏差可起到一定的补偿,降低了安装找正的复杂程度。
但对联轴器的加工精度要求较为严格,联轴器的几何尺寸精度、动平衡不合格都会造成压缩机轴振动。
(3)转子不平衡转子不平衡是因转子部件质量偏心或转子部件出现缺损造成的故障。
造成转子不平衡的具体原因很多,按发生不平衡的过程可分为原始不平衡、渐发性不平衡和突发性不平衡等几种情况。
原始不平衡是因转子制造误差、装配误差以及材质不均匀等原因造成的,如出厂时动平衡没有达到平衡精度要求,初始开机时便会产生较大的振动。

透平压缩机的振动分析一、振动的原因1、开车运行后的振动1.1原先在安装时电动机和大齿轮的同轴度完全根据设计要求来校正。
由于机组启动电流大,瞬间扭力也很大,造成电动机有移位感。
根据气温,设计要求安装时径向轴向误差允许在±0.02mm,我们严格照办。
机组运行一段时间后再测,明显测得轴向无变动,而径向的水平方向走动了0.18~0.20mm左右。
这说明机器在对中后走调的情况下运行,振动就会很大。
1.2空气中带有腐蚀性气体的冷凝水造成转子(尤其是3~4级)、气封、扩压器、碳钢空气管道等腐蚀十分严重,产生空气涡流的振动。
管道氧化物的被冲刷造成子平衡百战不殆,振动激烈,因此而被迫停车,此类事故已发生两次。
1.3频繁开停车对机组振动也有影响。
由于客观条件不允许或机械故障被迫一年中开停多次,使转子平衡被破坏。
停车时会把积在转子上的尘土或其他氧化物不均衡地脱落,破坏了转子的平衡。
2、检修后的振动2.1齿轮偏载造成工频振动。
透平机的转速很高,1~2级转速为15200rpm,3~4级为19200rpm,因而齿轮的精度要求也很高。
保持较高的齿轮接触面很重要,在静态下检查齿轮接触面无法得到动态的实际接触情况,我们的做法是在静态下使接触面不低于85%。
其中一台机组在检修时发现齿轮接触面差,一只新齿轮只运行两个多月就严重点蚀和大齿面剥落(一只大齿现价30万元左右)。
机组振动很大,齿轮的损坏就呈恶性循环,难以挽救。
2.2油膜涡动引起的低频振动。
轴承中的油膜在转轴和轴承间运行起着盗运和润滑作用,如轴承稳定性不好,会导致油膜半速涡动。
我三透平机转速为19200,约在10000左右产生低频振动。
低频振动产生与转子工作转速不合拍的激振力,对转子和轴寿命的影响程度超过工频振动的影响,它使转子振动总量增大,这历来被人们所禁忌。
如低频值是工频值的105时,就应引起重视。
我们原有的机器低频值大于工频值的5%,已造成严重后果。
轴瓦的锡基合金多次剥落(其实是撞落),被迫停机。
影响空气透平压缩机振动高的原因分析【摘要】空气透平压缩机原料空气压缩机是空分设备必须配备的,它是空分设备工艺流程中的第一个动设备。
我厂使用的DH45-7型离心空气透平压缩机配套安装了测振装置,以便对设备振动情况进行监测并采取针对性控制措施。
本文对振动发声的原因进行分析,并提出针对性解决措施。
【关键词】空气透平压缩机DH45-7 振动对策轴瓦磨损DH45-7型离心空气透平压缩机是我厂空分装置的关键设备之一,且没有备机,是空分装置的源头设备,它的运行情况的好坏直接影响着整个空分装置的安全稳定生产。
该空压机安装了测振装置,操作人员能够在中控室在线监测其振动变化。
1 空分装置及空透系统概况我厂空分装置是杭州制氧机厂提供的20世纪90年代先进技术,采用全低压、分子筛、增压膨胀制氧技术。
压缩机的工作轮在主轴和电机的带动下进行高速旋转,由于气体在叶轮里通过离心力增压,再在叶轮中的渐扩通道内增压。
气体在工作轮叶片的作用下,跟着工作轮高速旋转,气体由于受旋转离心力的作用以及在工作轮里的扩压流动,使气体通过工作轮后的压力得到提高。
气体流出工作轮后进入扩压器,把速度能转换为压力能,以提高气体压力。
最后通过弯道与回流器将气体引入下一级工作轮的入口。
在末级由蜗壳把气体汇集起来,排到压缩机外面。
2 装置存在的问题2008年11月3日空透检修后在机组启动后开导叶过程中,出现剧烈的振动声音,四级振动值达到96μm后逐步下降并稳定在46μm(正常振动为60μm以下)。
进入2009年2月,四级振动逐渐上升到61.8μm,空透三级轴承温度由58℃升高到70.33℃。
17日仪表人员对温度进行了校正,经校正温度显示正常。
18日三级轴温达70.3度,四级振动继续升高到96μm.。
从2009年6月份开始,四级轴瓦振动、三级轴瓦温度都呈上升趋势,四级轴瓦振动从20μm上升到54μm,三级轴瓦温度从50℃上升到62℃。
3 对空透振动高原因的分析和判断3.1 仪表指示不准确造成振动高振动高的现象发生后,仪表维修人员对测振装置进行了检查,并结合手持测振仪进行比较,未发现问题,因此可以排除仪表指示不准确的原因。
DH-80-20空气透平压缩机轴振动高原因分析及处理
张洪浩;陈英
【期刊名称】《中氮肥》
【年(卷),期】2006(000)004
【摘要】@@ DH-80-20型空气透平压缩机是沈阳鼓风机厂生产的离心式双轴四级叶轮压缩三级冷却空压机.2004年该机组连续3次因轴振动严重造成停车,给后序系统高负荷生产带来严重影响.大型空气透平压缩机组出现轴振动高是一普遍问题,但是引起每台机组轴振动高的原因却不尽相同.下面将我厂在分析、检修空透机组过程中的经验和体会作一简要总结,供同行们参考.
【总页数】3页(P52-54)
【作者】张洪浩;陈英
【作者单位】兖矿鲁南化肥厂,山东,滕州,277527;兖矿鲁南化肥厂,山东,滕
州,277527
【正文语种】中文
【中图分类】TK268+.1
【相关文献】
1.PIK80-4型空气透平压缩机润滑油温高原因及对策 [J], 赵媛;王伟
2.透平压缩机轴振动值高的原因分析与处理 [J], 汪达军
3.透平压缩机SSS盘车器故障分析及处理措施 [J], 杜文强
4.KKK离心式氯气透平压缩机联锁跳停故障分析及处理 [J], 赵鹏; 程艳彬
5.空气离心压缩机轴振动高原因分析及对策 [J], 田华
因版权原因,仅展示原文概要,查看原文内容请购买。
透平压缩机机组的横向振动和扭转振动分析CAECAE, 压缩机, 机组, 振动分析采用转子动力学分析软件MADYN 2000,对一台离心压缩机进行了横向振动分析,对一套轴流压缩机机组进行了扭转振动分析,讨论了转子动力学分析的重要性。
0 引言透平压缩机转子在启停机的升速或降速过程中,转速达到某一数值时,转子发生强烈振动,转速高于这一数值后,振幅又减小;振幅出现峰值的转速称为临界转速。
如果转子的转速停滞在临界转速附近,轴的变形将迅速增大,以至轴或轴上零件乃至整个机器遭到破坏。
因此,透平压缩机转子的转速应避开临界转速。
随着流程工艺复杂化,介质类型多样化,机械设备朝着大型化、精密化、高效化和高可靠性方向发展。
跨度较大、刚性较小、外伸端较长的轴被大量采用,压缩机转子临界转速都有不同程度的降低,更加容易引起共振。
对于“转子-齿轮-轴承”系统,整个轴系的扭转临界转速相对降低了很多,压缩机机组扭转振动问题也引起了极大的重视。
对于这些,需要采用功能相对完备的转子动力学软件。
能够进行横向振动、扭转振动等方面的分析。
可以考虑多种数据:包括轴的几何尺寸,叶轮、叶片、盘套等的位置以及相关属性,轴承的位置以及相关属性,联轴器相关属性,齿轮的相关属性,支撑的位置以及相关属性,材料属性,转子速度,不平衡量的大小、相位角和位置,附加的外部载荷的位置以及与时间相关的属性,外部激励的位置以及谐波等。
转子动力学分析软件“MADYN 2000”软件包,具有较强的功能和快捷的性能。
该软件包界面友好,易学易用、具有丰富的前处理、后处理功能。
可以对“转子-齿轮-轴承”系统进行横向振动、扭转振动、轴向振动等方面的仿真分析。
包括有临界转速分析、不平衡响应分析、阻尼特征值分析及转子稳定性分析、瞬态分析及非线性分析等。
可以考虑陀螺效应的影响、轴承的影响、基础的影响及密封的影响及齿轮的影响等。
“MADYN 2000”软件包主要采用梁结构,采用的梁理论是铁木辛柯梁(Timoshenko Beam);采用的计算分析方法是有限元法;采用的多项式是埃尔米特多项式。
这里,对一台离心压缩机进行了横向振动分析,对一套轴流压缩机机组进行了扭转振动分析。
图1 计算模型 1 横向振动分析 1.1 计算模型的建立这里计算分析一台离心压缩机。
计算模型考虑了各轴段及叶轮的转动惯量,考虑了滑动轴承8个动态特性系数。
计算模型如图1所示。
计算模型建立之后,可立即计算出转子的总质量、总转动惯量、重心位置等,便于进行数据核对。
1.2 计算及分析在分析计算时,进行了刚性支承下的特征值计算、滑动轴承支承下的特征值计算、不平衡响应分析等。
一阶不平衡响应分析结果如图2所示,二阶不平衡响应分析结果如图3所示。
图2 一阶不平衡响应分析结果图3 二阶不平衡响应分析结果在不平衡响应分析结果里,可直接显示出横向临界转速等数据,使用非常方便。
采用转子动力学分析软件MADYN 2000,对一台离心压缩机进行了横向振动分析,对一套轴流压缩机机组进行了扭转振动分析,讨论了转子动力学分析的重要性。
该离心压缩机的工作转速为11700r/min,经过计算,可得到一阶临界转速为4099r/min,二阶临界转速为21590 r/min,该转子在设计转速下运行时不会发生横向振动。
2 扭转振动分析 2.1 计算模型的建立计算和分析了一套轴流压缩机机组,该压缩机机组由电机、齿轮箱、轴流压缩机和膜片联轴器组成。
高速轴转速:4545 r/min,低速轴转速:1500 r/min,速比为3.030。
计算程序采用MADYN 2000软件,模型共分2个连续轴系,模型分布图如图4所示。
图4 机组的模型分布图图5 扭转振动CAMPBELL图 2.2 计算及分析在分析计算时,进行了特征值分析、阻尼特征值分析等,扭转振动CAMPBELL图如图5所示,扭转振动一阶振型图如图6所示,扭转振动二阶振型图如图7所示,扭转振动三阶振型图如图8所示。
图6 扭转振动一阶振型图图7 扭转振动二阶振型图图8 扭转振动三阶振型图计算的一阶扭转临界转速为1173 r/min(19.55 Hz),二阶扭转临界转速为3810 r/min(63.50 Hz),三阶扭转临界转速为18217r/min(303.62 Hz)。
根据有关标准,要求机组各阶扭转临界转速应避开1倍,2倍工作转速±10%这一范围,从机组的扭振CAMPBELL 图和各阶扭转临界转速振型图可以看出,该机组扭转振动计算结果满足了相关要求。
3 结论目前,各个方面对转子动力学分析的要求都在不断提高,进行横向振动、扭转振动等方面的分析也越来越多,振动特性测试、振动监测保护等方面的工作也增加了很多。
这样,转子动力学分析、试车测试、监测保护等工作可以有机地结合起来,以便机组更平稳地运行。
一、转子系统临界转速的概念图2-20 单盘转子示意图图2-21 圆盘的瞬时位置及受力转子系统是一类特殊的工程机械,下面通过最简单的转子模型来进行讨论,说明转子系统临界转速的概念。
设有一转子如图2-20所示,其中是固定坐标系,无质量的弹性轴的弯曲刚度为,在跨中安装有质量为的刚性薄盘。
由于材料、工艺等因素使圆盘的质心偏离轴线,偏心距为。
当转子以等角速度自转时,偏心引起的离心惯性力将使轴弯曲,产生动挠度,并随之带动圆盘公转。
设圆盘在瞬时的状态如图2-21所示,这时弹性轴因有动挠度而对圆盘的作用力为,它在坐标轴上的投影分别为(2-100)式中,为弹性轴在跨中的刚度系数,由材料力学可知,对于图2-20所示的模型(2-101)设圆盘在运动中受到粘性阻尼力的作用,它的两个分量为(2-102)式中,为粘性阻尼系数。
根据质心运动定理,可得:(2-103)由图2-21的几何关系知(2-104)对上式求两次导数,可得(2-105)把(2-105)代入(2-103),得到转子模型的运动微分方程(2-106)可改写为(2-107)式中,,把(2-107)式与有阻尼单自由度系统的强迫振动运动方程作一比较,显然两者在数学形式上是完全相同的。
因此引用其求稳态解的方法,设(2-108)把(2-108)代入(2-107)中,得到(2-109)由此可见,点绕固定坐标系的轴在作圆周运动。
对照几何关系可见圆周运动的半径就是轴的动挠度,角速度等于轴的自转角速度,因为有阻尼,动挠度与偏心之间存在相位差。
即有(2-110)根据(2-110)式可绘出在不同值时,和随值变化的曲线,分别如图2-22与图2-23所示。
由于的存在,在一般情况下,、和三点并不在一条直线上,而总是成一个三角形,而且的形状在转子以等角速度旋转过程中保持不变。
只有当时,,这三点才近似在一直线上,点位于和之间,即所谓圆盘的重边飞出。
当时,,这三点又近似在一直线上,但点位于和之间,即所谓圆盘的轻边飞出,这种现象称为自动定心,也叫偏心转向。
图2-22 转子动挠度的幅值-转速曲线图2-23 转子动挠度的相位-转速曲线根据国际标准,临界转速定义为:系统共振时发生主响应的特征转速,在这里就是使动挠度取得极值的转速,于是可利用条件(2-111)来确定临界转速,并以表示。
由(2-111)式得由此解得(2-112)可见外阻尼总使得转子的临界转速稍大于其横向自然频率,这在图2-22中也可以看出,各曲线的峰值都偏在线的右边,这一点应特别注意。
对于小阻尼情况(2-113)对于无阻尼的理想情况,即,在临界转速时,动挠度将达到无限大。
而相位角在临界转速之前为零,之后为,即在临界转速前后有相位突变,、和三点始终在一条直线上。
实际转子系统总存在一定阻尼,动挠度不会无限大,但比一般转速下的动挠度大得多,足以造成转子破坏,因此,工程上要严格避免转子在临界转速附近工作。
可见,正确的临界转速分析计算,在转子设计和处理实际问题中都很重要。
为了形象地表示自动定心(偏心转向)及在临界转速时的相位差,把、及三点在不同转速时的相对位置表示在图2-24上。
图2-24 在不同转速时的偏心位置二、振动传感器的基本原理一个完整的振动传感器,可以分为两部分,即机械接收部分和机电变换部分。
机械接收部分的作用是将被测的机械量(如振动位移、速度、加速度等)接收为另一个适合于机电变换的中间量。
机电变换部分再将中间量变换为电量输出。
振动传感器常用的机械接收原理有相对式和惯性式两种。
下面以惯性式传感器的接收为例来讨论振动传感器的基本原理。
惯性接收传感器的接收部分可以简化为由质量、弹簧和阻尼构成的单自由度系统,如图2-25所示。
设传感器的底座完全刚性地固定在测量对象上,与被测体具有完全相同的运动规律。
设测量对象的振动为,质量相对于底座的相对振动为,则表示接收关系的相对振动微分方程为图2-25 惯性传感器的接收部分简化模型(2-114)可改写为(2-115)其中,,为传感器底座完全刚性固定不动时接收部分的自然频率,也称为“固定安装共振频率”,为接收部分的阻尼比。
后面将会看到,固定安装共振频率及阻尼比是决定传感器使用频率范围的两个最主要的参数。
下面分两种情况讨论。
1. 位移计型惯性接收(,)设输入的被测振动的复数形式为(2-116)经接收后输出的相对振动的稳态响应为(2-117)代入(2-115)式,可得:(2-1 18)式中,为输入对输出的幅值比,它相当于机械接收部分的灵敏度,为无量纲动力放大系数,为输出对输入的相位(2-119)b (2 -120)其中,称为频率比。
在图2-26(a)、(b)中分别给出了、随的变化规律,从图中可以看出:(1)使用频率范围。
当以后,曲线逐渐进入平坦区,并随着的增加而趋向于1。
这一平坦区就是位移计型传感器的使用频率范围。
因此,对于位移计型惯性接收的传感器来说,测量频率要大于传感器的自然频图2-26 位移计型惯性式接收特性曲线(a)辐频特性曲线;(b)相频特性曲线率。
为了压低使用频率下限,一般引进的阻尼比,这样,曲线在过了之后,很快进入平坦区。
在的范围内,接收灵敏度急剧下降,因此,位移计型惯性接收不适用于比传感器自然频率更低的振动测量。
理论上讲,测量频率上限无限制。
(2)阻尼与相移。
引进阻尼虽然改善了附近接收灵敏度曲线的平坦度,但是,阻尼使相移大大增加,从图中相移曲线上可以看到,在的区域内,值的取值越大,相移角偏离无相移线的差角也越大。
这在传感器使用中应当注意。
(3)幅值上限。
位移计型惯性接收的传感器在其使用频率范围内,其内部惯性质量的相对振动位移的幅值接近于被测振动位移幅值。
因此,它不允许测量超过其内部可动部分行程的振动位移。
需要说明的是,位移计型惯性接收的传感器不等于是位移传感器,这还取决于传感器所采用的机电变换原理。
2. 加速度计型惯性接收()令被测的振动加速度的复数形式为(2-121)式中,为加速度的复振幅,它与位移复振幅的关系为(2-122)由(2-115)可求得输出的相对振动位移与输入的振动加速度的复振幅比(表示为无量纲形式)为(2-123)上式中,仍为传感器固定安装时的自然频率,仍代表接收灵敏度。