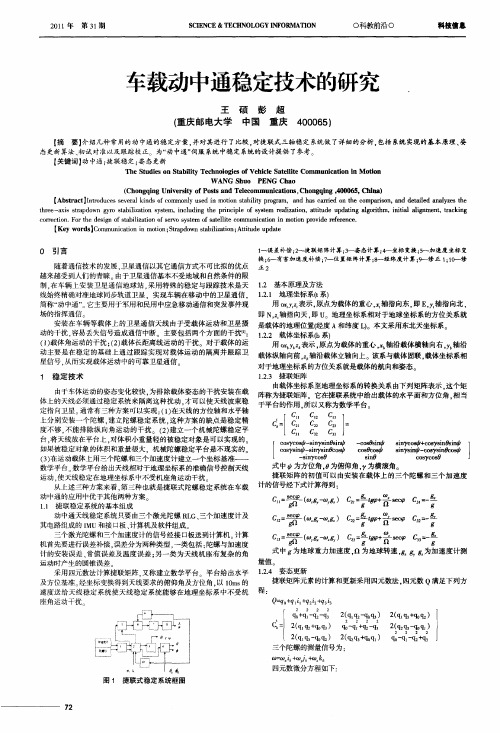
基于捷联稳定的三轴车载动中通伺服系统
- 格式:pdf
- 大小:275.98 KB
- 文档页数:4

基于三轴旋转的旋转光纤捷联惯性导航系统张玲;刘建业;赖际舟【期刊名称】《南京航空航天大学学报(英文版)》【年(卷),期】2008(025)004【摘要】The principle of the inertial navigation system(INS) with rotating inertial measurement unit (IMU) is analyzed. A new IMU is established to rotate round each axis in three directions. Then, the related error models for the designed system during rotating are deduced and the improved system is built. Finally, the performance simulation of the proposed system is provided. The simulation result indicates that the designed system can improve the accuracy of the roll and the pitch as well as heading by rotating three axes, thus guaranting the heading accuracy. Moreover, based on the principle of rotation at six different positions, such structure can carry out real-time calibration, and improve the system performance.%介绍了基于旋转惯性器件的惯性导航系统的工作原理.根据该方案的思想对捷联惯性导航系统加以改进,设计了可绕三轴旋转的IMU机构,建立了旋转机构误差模型.仿真结果表明,该机构符合最初对它的设计要求,即提高了导航系统关于横滚、俯仰姿态的精度,同时也达到了通过三轴旋转提高航向角跟踪精度的目的,故弥补了目前研究的旋转惯导系统无法调制航向角精度的缺陷.此外,这该绕三轴旋转的惯导系统还可以根据六位置旋转法原理实现实时标定功能,从而进一步改善系统性能.【总页数】6页(P289-294)【作者】张玲;刘建业;赖际舟【作者单位】南京航空航天大学自动化学院,南京,210016,中国;南京航空航天大学自动化学院,南京,210016,中国;南京航空航天大学自动化学院,南京,210016,中国【正文语种】中文【中图分类】V249.32因版权原因,仅展示原文概要,查看原文内容请购买。

动中通天线捷联姿态稳定平台建模与仿真
周建华;吴佟;高振兴
【期刊名称】《通信与广播电视》
【年(卷),期】2013(000)004
【摘要】动中通技术是保证卫星天线在载体运动过程中始终保持空间指向稳定的一种技术。
传统的动中通天线稳定是构建悬浮隔离的机械稳定平台,该方案必须通过连续跟踪卫星信标及其他修正来消除稳定平台的漂移。
本文研究了在天线上构建捷联式姿态稳定平台来实现天线姿态的实时解算,在GPS、水平仪等其他传感器提供校准基准的情况下,实现天线姿态的长时间精确指向稳定。
通过仿真表明,方案可行,能够实现天线控制的解耦,并保证天线的长时间指向稳定。
【总页数】6页(P15-20)
【作者】周建华;吴佟;高振兴
【作者单位】
【正文语种】中文
【中图分类】V241.5
【相关文献】
1.一种用于 S120船载动中通的天线姿态稳定跟踪装置 [J], 北京空间科技信息研究所知识产权中心提供
2.弹载捷联天线稳定平台控制与仿真研究 [J], 赵超
3.捷联雷达导引头天线平台角稳定技术研究 [J], 李军显;王晓宇;武亚平
4.基于捷联稳定的低成本动中通天线设计 [J], 黄元庆
5.捷联姿态测量系统误差的建模与GUI仿真 [J], 孟红秋;周雪梅;吴简彤
因版权原因,仅展示原文概要,查看原文内容请购买。

基于DSP的微型捷联惯导系统设计
刘瑞华
【期刊名称】《航天控制》
【年(卷),期】2005(23)4
【摘要】主要讨论微小型惯性导航系统的工程设计问题。
以微机电惯性测量元件(MEMS-IMU)为惯性传感器,以数字信号处理器(DSP)为核心作为导航计算机,设计构造了一种微小型捷联惯性导航系统。
给出了系统的硬件结构框图和程序设计流程图,并讨论了DSP软件设计和调试中的一些问题。
利用本方案,对于实现军事和工程领域中导航系统微小型化、降低系统成本和体积具有重要意义。
【总页数】4页(P24-26)
【关键词】数字信号处理器;微机电系统;捷联惯性导航系统
【作者】刘瑞华
【作者单位】中国民航学院智能信号与图像处理天津市重点实验室
【正文语种】中文
【中图分类】TJ765
【相关文献】
1.基于DSP的无陀螺捷联惯导系统设计 [J], 赵倩;马铁华;范锦彪
2.基于DSP测量的捷联惯导系统设计 [J], 郝鹏;马建仓
3.基于DSP的光纤捷联惯导系统设计与实现 [J], 王凯;赵忠;吴坤民
4.基于FPGA/DSP的捷联惯导系统设计 [J], 彭荆明;徐良波;舒旭光
5.基于DSP的捷联惯导系统设计 [J], 牛海燕;汪渤
因版权原因,仅展示原文概要,查看原文内容请购买。


电信工程技术与标准化2007.8国务院2006年1月8日发布《国家突发公共事件总体应急预案》,要求“建立健全应急通信、应急广播电视保障工作体系,完善公用通信网,建立有线和无线相结合、基础电信网络与机动通信系统相配套的应急通信系统,确保通信畅通”。
现有的G SM 通信业务依赖于大量的基站,在基站覆盖不足的区域,以及基站受到自然灾害、人为破坏等毁坏时,就难于应用G SM 进行应急通信,而且G SM 在高速移动中的通信速率也难于支持多媒体业务。
利用同步卫星K u 频段转发器的点波束和区域波束对我国大陆的覆盖,在移动平台上配置超小口径卫星通信终端,实现卫星移动通信业务,简称“动中通”,是实现应急通信的一种很好的选择。
1“动中通”通信系统“动中通”通信系统由3个分系统组成,天线分系统:反射面天线与馈源、天线罩、天线座与传动组合,安装在载车车厢顶上的天线罩内;伺服分系统:各类传感器、天线控制器和跟踪接收机,安装在载车车厢顶上的天线罩内;通信终端分系统:LN B 、BUC 、M o de m 、路由器、终端设备,其中LN B 与B U C 安装在载车车厢顶上,其余安装在载车内。
“动中通”通信系统的关键技术是当载车在高速运动、上下坡、颠簸、转弯条件下,天线伺服控制系统使天线波束始终精确对准卫星。
因此,伺服系统的主要目标是:第一,实现对卫星的跟踪;第二,实现天线相对于大地的稳定。
本系统采用了步进跟踪和圆锥扫描自动跟踪技术相结合的复合跟踪技术,天线控制器根据载车的地理位置和卫星的定点位置,计算出卫星相对于大地坐标的方位角和俯仰角,驱动电机,使天线波束指向卫星,一旦发现卫星信号电平大于设置的门限电平,则进入步进跟踪状态。
此时天线波束根据实时监测的卫星信号电平指示,逐步逼近最大信号电平,然后,天线控制器控制天线进行圆锥扫描。
为了隔离载车运动对天线指向的影响,本系统采用了方位、俯仰和横滚三轴角速率陀螺,分别感知三轴相对于惯性空间角位置变化的速度,通过坐标变换,驱动电机反向运动进行位置补偿,保持天线所需的姿态,实现方位、俯仰二轴数字稳定平台。
移动卫星通信捷联式天线稳定系统
李锴;方飞
【期刊名称】《化工设计通讯》
【年(卷),期】2016(042)003
【摘要】目前移动卫星通信系统已经在我国各行各业中都有较为广泛的应用,可以说卫星通信系统已经成为人们工作和生活中的重要组成部分,在移动卫星通信系统作用发挥的过程中离不开相关稳定系统的支持,只有最大程度的保证稳定系统的有效性,才能够使得移动卫星通信系统职能的拓展与完善奠定基础,相关部门以及公司必须加强对其的重视.
【总页数】1页(P221)
【作者】李锴;方飞
【作者单位】中国交通通信信息中心,北京 100011;中国交通通信信息中心,北京100011
【正文语种】中文
【中图分类】TN927.2
【相关文献】
1.移动卫星通信捷联式天线稳定系统 [J], 滕云鹤;毛献辉;章燕申;李俊峰;刘进江
2.捷联式光学稳定系统在光电桅杆上的应用 [J], 杨越;聂辉
3.捷联式双天线稳定平台设计及坐标系变换 [J], 胡松涛;王振收
4.卫星天线捷联式稳定平台构建分析 [J], 张毅; 赵春标; 潘良勇
5.光电着舰测量设备甲板捷联式视轴稳定系统设计 [J], 李雪雷;王志乾;苏宛新;乔彦峰
因版权原因,仅展示原文概要,查看原文内容请购买。
基于捷联稳定的低成本动中通天线设计黄元庆【摘要】针对MEMS惯导器件精度差、无法完成寻北以及漂移速度快的缺点,引进GPS/北斗速度信息,通过卡尔曼滤波算法进行误差估计,实现了惯导姿态的稳定输出.在捷联稳定的基础上,叠加主面圆锥扫描,利用同步卫星信标进一步进行误差修正.通过实验验证,该方法能够在大动态情况下完成天线的稳定跟踪.【期刊名称】《河北省科学院学报》【年(卷),期】2016(033)004【总页数】5页(P36-40)【关键词】MEMS;GPS/北斗;卡尔曼滤波;捷联稳定;主面圆锥扫描【作者】黄元庆【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TN965随着卫星通信技术的发展以及移动通信的应用,移动载体卫星通信系统的需求量逐年增加[1]。
动中通天线作为通信系统的前端,完成信号的发射和接收。
因此,如何保证天线在载体移动过程中始终指向卫星,成为动中通天线的研究重点。
传统的动中通天线普遍使用单脉冲、副面圆锥扫描等平台稳定方式,其优点是跟踪精度高、对惯导依赖性低,但是由于复杂的网络结构以及副面圆扫机构,使得天线的复杂度大幅提高,必然造成可靠性的降低。
捷联稳定方式是另一种常用的动中通天线跟踪方式,其优点是结构简单,可靠性高,但是对惯导的精度要求很高,常用的激光惯导或光纤惯导的价格就有几十甚至上百万,造成整个动中通天线价格异常昂贵。
为了降低成本,本文采用低精度的MEMS惯导,引入GPS/北斗信息进行姿态修正,结合动中通天线系统中自身特有的信息与惯导进行信息融合,实现动中通天线的稳定跟踪。
由于MEMS陀螺、加速度计的精度以及零偏问题,单纯的MEMS惯导存在不可避免的误差及漂移问题。
为解决该问题,引入GPS/北斗的东向、北向、天向速度作为观测量,通过卡尔曼滤波器对陀螺、加速度计等惯性器件进行误差补偿,结合捷联惯性导航解算算法得到高带宽的角速度、加速度、位置、速度、航向、姿态信息。