高差法和仪高法的原理精讲
- 格式:doc
- 大小:430.50 KB
- 文档页数:15
第3章水准测量视频导学:测量地面各点高程的工作称为高程测量。
根据所使用的仪器和工程要求,高程测量的方法有水准测量(水准仪)、三角高程测量(经纬仪配标尺或全站仪配棱镜)、物理高程测量和GPS高程测量(GPS接收机)。
其中,物理高程测量又分为气压高程测量和液态静力水准测量。
气压高程测量采用气压计测定两点的气压差推算高差的方法,主要用于高差较大的丘陵地区和山区的勘测工作,其精度低于水准测量和三角高程测量。
液态静力水准测量是根据流通的原理来测量高差的方法,常用仪器有流体静力水准仪,主要用于工程建筑物及其沉陷观测、地震和大型机械安装测量等。
在上述方法中,水准测量是最基本、精度最高、最常用的一种方法,广泛应用于国家高程控制测量、土木工程和施工测量中。
所以,本章着重介绍水准测量。
本章主要介绍了水准测量的基本原理;水准仪的结构特点(DS3微倾式、自动安平、精密与数字水准仪等);如何使用水准仪测量两点间高差;水准测量的外业及内业数据处理方法;最后介绍了水准测量误差分析和减弱误差、提高精度提出解决的措施。
本章需要着重掌握的是水准测量的原理;水准仪的操作要领;水准测量的实施及成果数据处理。
其中,水准测量的实施及成果数据处理是本章的难点。
通过本章的学习希望同学们掌握哪些内容呢?1、水准测量的原理;2、水准仪的操作要领;3、水准测量的观测、记录、计算和检核以及测量数据处理方法;4、学会误差的防止、消除或减弱的方法。
学习方法建议:1、充分理解水准测量的实质是测量两点间高差,高程是间接求得的;2、充分理解水准测量的实施操作步骤、数据处理的理论知识;3、勤动手、多实践,做适当的实验是巩固理论知识的很好办法;4、在实践时,要有利用理论知识解决实际问题的能力,提高测量精度的能力。
测量学是一门实践性很强的课程。
实践又分为实验和实习,实验是课间安排的,即学习某些章节后安排的实践课;实习是在课程完成之后做的综合性实践。
所以,请同学们在充分理解理论知识的同时,多实践、勤动手,巩固和验证所学的知识。

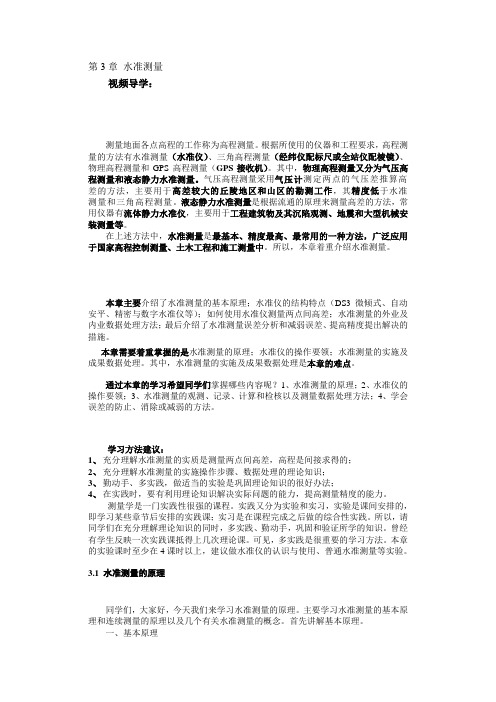
水准测量工作原理及水准仪示意图:水准测量的原理是利用水准仪提供的一条水平视线,测出两地面点之间的高差,然后根据已知点的高程和高差,推算出另一个点的高程。
2.1.1高差法如图2.1所示,已知地面上A点的高程为H A,欲测定B点的高程H B,需要先测出A、B两点间的高差h AB,为此在A、B之间安置一台水准仪,再在A、B两点上各竖立一根水准尺。
根据仪器的水平视线,分别读取A、B尺上的读数a和b,则B点对于A点的高差为:h AB=a-b (2.1)如果水准测量是由A到B进行的,如图2.1中的箭头所示,则A点尺上的读数称为后视读数,记为a;B点为待定高程点,B点尺上的读数称为前视读数,记为b;两点间的高差等于后视读数减去前视读数,即hAB=a-b。
若a大于b,则高差为图2.1正,B点高于A点;反之高差为负,则B点低于A点。
因为水准仪提供的水平视线可认为与大地水准面平行,由图2.1可知H B=H A+h AB=H A+(a-b)(2.2)由式(2.2)根据高差推算待定点高程的方法叫做高差法。
例1:图2.1中已知A点高程H A=452.623m,后视读数a=1.571m,前视读数b=0.685m,求B点高程。
解:B点对于A点高差:h AB=1.571-0.685=0.886mB点高程为:H B=452.623+0.886=453.509m例2:图2.2中,已知A点桩顶标高为±0.00,后视A点读数a=1.217m,前视B 点读数b=2.426m,求B点标高。
解:B点对于A点高差:h AB=a-b=1.217-2.426=-1.209mB点高程为:H B=H A+h AB=0+(-1.209)=-1.209m2.1.2、视线高法图2.2 如图2.1所示,B点高程也可以通过仪器视线高程Hi,求得。
视线高: H i=H A+a (2.3)待定点高程: H B=H i-b (2.4)由式(2.4)通过视线高推算待定点高程的方法称为视线高法。
AB = a - b(2-1)AB(2-2)AB = H + a - b(2-3)第一节 水准测量的原理确定地面点高程的测量工作,称为高程测量。
高程测量又是测量三项基本工作之一。
根据 使用仪器和施测方法的不同,高程测量可分为水准测量、三角高程测量和气压高程测量。
用水准仪测量高程,称为水准测量,它是高程测量中最常用、最精密的方法。
水准测量的原理:水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可由已知点的高程推算出未知点的高程。
测定待测点高程的方法有高差法和仪高法两种。
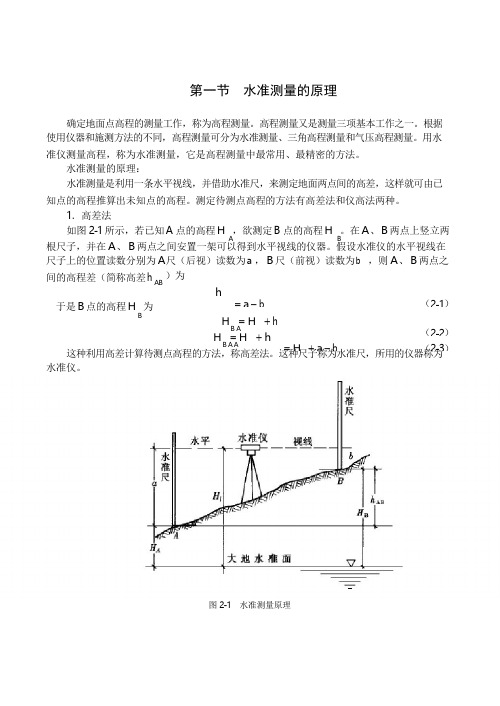
1.高差法如图 2-1 所示,若已知 A 点的高程 H ,欲测定 B 点的高程 H 。
在 A 、 B 两点上竖立两 AB根尺子,并在 A 、 B 两点之间安置一架可以得到水平视线的仪器。
假设水准仪的水平视线在 尺子上的位置读数分别为 A 尺(后视)读数为 a , B 尺(前视)读数为 b ,则 A 、 B 两点之间的高程差(简称高差 h于是 B 点的高程 H 为BAB)为hH = H + h B AH = H + h B A A这种利用高差计算待测点高程的方法,称高差法。
这种尺子称为水准尺,所用的仪器称为 水准仪。
图 2-1 水准测量原理AB 是有正负的,计算高程时,高差应连其符号一并运算。
在书写hAB时,注AB 是表示B点相对于A点的高差;hBA则表示是A点相对于B点的高差。
hBA 的绝对值相等,但符号相反。
2.仪高法由式2-3可以写为H=(H+a)-b(2-4)B A如图2-2所示,即H=H-bB i上式中H是仪器水平视线的高程,常称为仪器高程或视线高程。
仪高法是,计算一次仪高,i就可以测算出几个前视点的高程。
即放置一次仪器,可以测出数个前视点的高程。
综上所述,高差法和仪高法都是利用水准仪提供的水平视线测定地面点高程。
必须注意①前视与后视的概念一定要清楚,不能误解为往前看或往后看所得的水准尺读数。
②两点间高差h意h的下标,hAB 与h图2-2仪高法水准测量第二节水准仪使用水准测量所使用的仪器为,工具为水准尺和尺垫。

高程测量——水准测量水准测量是利用水准仪和水准标尺,根据水平视线原理测定两点间高差的测量方法。
测定待测点高程的方法有两种:高差法和仪高法。
一、高差法如图1-1所示,图1-1若A点的高程已知为H,欲测定B点的高程H。
施测时在A、B BA两点上分别竖立一根水准标尺(简称水准尺),并在A、B两点间安置水准仪,照准A点标尺(常称为后视尺),利用水准仪提供的水平视线读出标尺上的读数为a(后视读数),再照准B点的标尺(常称为前视尺),用水准仪的水平视线读出读数为b(前视读数),则B点相对对于A 点的高差为:h=a-b (1-1)AB B点的高程为:H=H+h=H+(a-b) (1-2) AABab在此施测过程中,A点为已知高程点,B点为待测定高程的点,测量是由A点向B点为前进方向,故称A点为后视点,B点为前视点;由上述可知:测定待定点与已知点之间的高差,就可以求算得待定点的高程。
用文字表述(1-1)式,则为:两点间高差等于后视读数减去前视读数。
相对来说,读数小表示地面点高,读数大表示地面点低。
为此,高差有正,负之分;当h为正值时,即表示前视点B比后视点A AB专业文档供参考,如有帮助请下载。
.高;h为负值时,表示B点比A点低,计算高程时,高差应连同其符AB号一并运算。
在书写h时.必须注意h的下标,h是表示R点相对ABAB于A点的高差。
若高差写作h,则表示A点相对于B点的高差。
h ABBA 与h的绝对值是相等的,但符号相反。
上述利用高差计算待测点高BA 程的方法,叫高差法。
二、仪高法由图1-2可以看出,H是仪器水平视线的高程,通常叫视线高程i或仪器高程,简称仪高。
前视点高程也可以通过仪高H求得。
i图1-2仪高法的观测方法与高差法完全相同。
计算时,先算出仪高H。
i如图1-2所示,仪高等于后视点高程加后视读数,即:H=H+a (1-3) Ai则N 点、M点、B点的高程分别为:H=H-n (1-4) iN H=H-m (1-5) iM H=H+a (1-6)Ai用文字表示(1-4)式,则为:前视点高程等于仪高减去前视读数。

一、工程测量的原理(一)水准测量原理——水准测量原理:是利用水准仪和水准标尺,根据水平视线原理测定两点高差的测量方法。
——利用水准仪和水准标尺测定待测点高程的方法:高差法和仪高法1.高差法——采用水准仪和水准尺测定待测点与已知点之间的高差,通过计算得到待定点的高程的方法;2.仪高法——采用水准仪和水准尺,只需计算一次水准仪的高程,就可以简便地测算几个前视点的高程。
请注意两种方法的应用选择:当安置一次仪器,同时需要测出数个前视点的高程时,使用仪高法。
(二)基准线测量方法——基准线测量原理:是利用经纬仪和检定钢尺,根据两点成一直线原理测定基准线。
——测定待定位点的方法有:水平角测量和竖直角测量,这是确定地面点位的基本方法。
每两个点位都可连成一条直线(或基准线)。
切记:1.保证量距精度的方法返测丈量,当全段距离量完之后,尺端要调头,读数员互换,按同法进行返测,往返丈量一次为一测回,一般应测量两测回以上。
——量距精度以两测回的差数与距离之比表示。
2.安装基准线的设置安装基准线一般都是直线,只要定出两个基准中心点,就构成一条基准线。
——平面安装基准线不少于纵横两条3.安装标高基准点的设置根据设备基础附近水准点,用水准仪测出的标志具体数值。
——相邻安装基准点高差应在 mm以内(一)工程测量的程序建筑安装或工业安装的测量,其基本程序是:(二)平面控制测量1.平面控制测量的要求(1)平面控制网建立的测量方法——三角测量法、导线测量法、三边测量法等。
(2)平面控制网的坐标系统,应满足测区内投影长度变形值不大于Km。
(3)三角测量的网(锁)布设,应符合下列要求:各等级的首级控制网,宜布设为近似等边三角形的网(锁)。
其三角形的内角不应小于30°;当受地形限制时,个别角可放宽,但不应小于25°。
2.平面控制网布设的方法——导线测量法和三边测量法2)三边测量法的技术要求各等级三边网的起始边至最远边之间的三角形个数不宜多于10个;其三角形的内角不应小于30°;当受地形限制时,个别角可放宽,但不应小于25°。
---------------------------------------------------------------最新资料推荐------------------------------------------------------1 / 14高程测量与水准仪原理及使用方法第一节 水准测量的原理 确定地面点高程的测量工作, 称为高程测量。
高程测量又是测量三项基本工作之一。
根据使用仪器和施测方法的不同, 高程测量可分为水准测量、三角高程测量和气压高程测量。
用水准仪测量高程, 称为水准测量, 它是高程测量中最常用、最精密的方法。
水准测量的原理:水准测量是利用一条水平视线, 并借助水准尺, 来测定地面两点间的高差, 这样就可由已知点的高程推算出未知点的高程。
测定待测点高程的方法有高差法和仪高法两种。
1. 高差法 如图 2-1 所示, 若已知 A 点的高程AH , 欲测定 B 点的高程根尺子, 并在 A 、 B 两点之间安置一架可以得到水平视线的仪器。
假设水准仪的水平视线在尺子上的位置读数分别为 A 尺(后视)读数为 a , B 尺(前视) 读数为 b , 则 A 、 B 两点之h ) 为。
在 A 、 B 两点上竖立两间的高程差(简称高差ABb (2-1) 于是 B 点的高程BH 为 (2-2)(2-3) 这种利用高差计算待测点高程的方法,称高差法。
这种尺子称为水准尺,所用的仪器称为水准仪。
图 2-1 水准测量原理 2.仪高法由式2-3 可以写为如图 2-2 所示,即 H 是仪器水平视线的高程,常称为仪器高程或视线高程。
仪高法是,计算一次仪高,就可以测算出几个前视点的高程。
即放置一次仪器,可以测出数个前视点的高程。
综上所述,高差法和仪高法都是利用水准仪提供的水平视线测定地面点高程。
必须注意①前视与后视的概念一定要清楚,不能误解为往前看或往后看所得的水准尺读数。
h是有正负的,计算高程时,高差应连其符号一并运算。
2H312010 机电工程测量技术2H312011 测量要求和方法一、工程测量的原理施工测量包括对建(构)筑物施工放样、建(构)筑物变形监测、工程竣工测量等。
施工测量的首要工作是做好控制点布测,保证将设计的建(构)筑物位置正确地测设到地面上,作为施工的依据。
(一)水准测量原理水准测量原理是利用水准仪和水准标尺,根据水平视线原理测定两点高差的测量方法。
测定待测点高程的方法有高差法和仪高法两种。
1.高差法采用水准仪和水准尺测定待测点与已知点之间的高差,通过计算得到待定点的高程的方法。
2.仪高法采用水准仪和水准尺,只需计算一次水准仪的高程,就可以简便地测算几个前视点的高程。
例如:当安置一次仪器,同时需要测出数个前视点的高程时,使用仪高法是比较方便的。
(二)基准线测量原理基准线测量原理是利用经纬仪和检定钢尺,根据两点成一直线原理测定基准线。
测定待定位点的方法有水平角测量和竖直角测量,这是确定地面点位的基本方法。
每两个点位都可连成一条直线(或基准线)。
平面安装基准线不少于纵横两条。
二、工程测量的程序和方法(一)工程测量的程序无论是建筑安装还是工业安装的测量,其基本程序都是:建立测量控制网→设置纵横中心线→设置标高基准点→设置沉降观测点→安装过程测量控制→实测记录等。
【例1】(2010真题)在工程测量的基本程序中,设置标高基准点后,下一步应进行的程序是()。
A.安装过程测量控制B.建立测量控制网C.设置沉降观测点D.设置从横中心线[答疑编号950937102101:针对该题提问]【答案】C(二)平面控制测量1.平面控制测量的要求平面控制网建立的测量方法有三角测量法、导线测量法、三边测量法等。
平面控制网的坐标系统,应满足测区内投影长度变形值不大于2.5cm/km。
(三)高程控制测量高程测量的方法有水准测量法、电磁波测距三角高程测量法,常用水准测量法。
一个测区及其周围至少应有3个水准点。
设备安装过程中,测量时应注意:最好使用一个水准点作为高程起算点。
双仪高法水准测量高差计算方法一、引言双仪高法水准测量是工程测量中常用的一种测量方法,用于测量不同地点的高差。
在进行双仪高法水准测量时,需要准确计算高差,以确保测量结果的准确性和可靠性。
本文将介绍双仪高法水准测量高差计算的方法。
二、基本原理双仪高法水准测量是利用水平线和垂直线的相交关系来测量高差的方法。
在进行测量时,首先需要设置两个基准点,分别为A点和B 点。
然后在A点和B点之间设置一条水平线,利用水平仪测量出该水平线的高度差。
接下来,使用双反射仪测量出A点和B点之间的垂直距离。
最后,利用勾股定理计算出A点和B点之间的高差。
三、具体步骤1. 设置基准点:选择两个稳定的基准点A和B,并在测量区域内合理设置观测点C、D等。
2. 测量水平线高差:在A点和B点之间的水平线上设置水平仪,利用水平仪测量出水平线上各观测点的高度差。
3. 测量垂直距离:使用双反射仪,在A点和B点之间分别测量出各观测点的垂直距离。
4. 计算高差:根据测量得到的水平线高差和垂直距离,利用勾股定理计算出每个观测点与基准点A的高差。
5. 检查和校正:对测量结果进行检查和校正,确保测量的准确性和可靠性。
四、注意事项1. 在进行双仪高法水准测量时,应选择稳定的天气条件,避免大风、雨雪等不利因素对测量结果的影响。
2. 在设置基准点时,要选择地势平坦、无明显变化的地点,以减小测量误差。
3. 在测量水平线高差时,应注意水平仪的准确校正和读数精度,避免人为误差的产生。
4. 在测量垂直距离时,要保持双反射仪与观测点之间的水平距离,并注意避免反射镜的污染和损坏。
5. 在计算高差时,要注意单位的统一和计算精度的控制,以确保计算结果的准确性。
6. 在检查和校正测量结果时,应比较各观测点的高差与实际地面高差的差异,及时发现和纠正可能存在的误差。
五、总结双仪高法水准测量是一种常用的测量方法,通过测量水平线高差和垂直距离,可以准确计算出不同地点的高差。
在进行测量时,需要注意测量条件的选择和设置基准点的准确性,以及测量仪器的校正和读数精度。
二级建造师机电实务讲义特训版内部资料,请勿外传一、工程测量的原理(一)水准测量原理——水准测量原理是利用水准仪和水准标尺,根据水平视线原理测定两点高差的测量方法.-—测定待测点高程的方法两种:高差法和仪高法1.高差法-—采用水准仪和水准尺测定待测点与已知点之间的高差,通过计算得到待定点的高程的方法;2.仪高法—-采用水准仪和水准尺,只需计算一次水准仪的高程,就可以简便地测算几个前视点的高程。
请注意两种方法的应用选择:当安置一次仪器,同时需要测出数个前视点的高程时,使用仪高法是比较方便的。
所以,在工程测量中仪高法被广泛地应用。
(二)基准线测量方法-—基准线测量原理是利用经纬仪和检定钢尺,根据两点成一直线原理测定基准线。
是基准线测量原理切记:1.保证量距精度的方法返测丈量,当全段距离量完之后,尺端要调头,读数员互换,按同法进行返测,往返丈量一次为一测回,一般应测量两测回以上。
—-量距精度以两测回的差数与距离之比表示.安装基准线一般都是直线,只要定出两个基准中心点,就构成一条基准线。
-—平面安装基准线不少于纵横两条3.安装标高基准点的设置根据设备基础附近水准点,用水准仪测出的标志具体数值。
——相邻安装基准点高差应在0。
3mm以内二、工程测量的程序和方法(一)工程测量的程序建筑安装或工业安装的测量,其基本程序是:建立测量控制网-→设置纵横中心线-→设置标高基准点—→设置沉降观测点-→安装过程测量控制—→实测记录等.(二)平面控制测量1.平面控制测量的要求(1)平面控制网建立的测量方法—-三角测量法、导线测量法、三边测量法等.(2)平面控制网的坐标系统,应满足测区内投影长度变形值不大于2。
5cm/Km.(3)三角测量的网(锁)布设,应符合下列要求:各等级的首级控制网,宜布设为近似等边三角形的网(锁).其三角形的内角不应小于30°;当受地形限制时,个别角可放宽,但不应小于25°。
2.平面控制网布设的方法—-导线测量法和三边测量法1)导线测量法的技术要求当导线平均边长较短时,应控制导线边数;当导线网用作首级控制时,应布设成环形网,网内不同环节上的点不宜相距过近。
第3章水准测量视频导学:测量地面各点高程的工作称为高程测量。
根据所使用的仪器和工程要求,高程测量的方法有水准测量(水准仪)、三角高程测量(经纬仪配标尺或全站仪配棱镜)、物理高程测量和GPS高程测量(GPS接收机)。
其中,物理高程测量又分为气压高程测量和液态静力水准测量。
气压高程测量采用气压计测定两点的气压差推算高差的方法,主要用于高差较大的丘陵地区和山区的勘测工作,其精度低于水准测量和三角高程测量。
液态静力水准测量是根据流通的原理来测量高差的方法,常用仪器有流体静力水准仪,主要用于工程建筑物及其沉陷观测、地震和大型机械安装测量等。
在上述方法中,水准测量是最基本、精度最高、最常用的一种方法,广泛应用于国家高程控制测量、土木工程和施工测量中。
所以,本章着重介绍水准测量。
本章主要介绍了水准测量的基本原理;水准仪的结构特点(DS3微倾式、自动安平、精密与数字水准仪等);如何使用水准仪测量两点间高差;水准测量的外业及内业数据处理方法;最后介绍了水准测量误差分析和减弱误差、提高精度提出解决的措施。
本章需要着重掌握的是水准测量的原理;水准仪的操作要领;水准测量的实施及成果数据处理。
其中,水准测量的实施及成果数据处理是本章的难点。
通过本章的学习希望同学们掌握哪些内容呢?1、水准测量的原理;2、水准仪的操作要领;3、水准测量的观测、记录、计算和检核以及测量数据处理方法;4、学会误差的防止、消除或减弱的方法。
学习方法建议:1、充分理解水准测量的实质是测量两点间高差,高程是间接求得的;2、充分理解水准测量的实施操作步骤、数据处理的理论知识;3、勤动手、多实践,做适当的实验是巩固理论知识的很好办法;4、在实践时,要有利用理论知识解决实际问题的能力,提高测量精度的能力。
测量学是一门实践性很强的课程。
实践又分为实验和实习,实验是课间安排的,即学习某些章节后安排的实践课;实习是在课程完成之后做的综合性实践。
所以,请同学们在充分理解理论知识的同时,多实践、勤动手,巩固和验证所学的知识。
曾经有学生反映一次实践课抵得上几次理论课。
可见,多实践是很重要的学习方法。
本章的实验课时至少在4课时以上,建议做水准仪的认识与使用、普通水准测量等实验。
3.1 水准测量的原理同学们,大家好,今天我们来学习水准测量的原理。
主要学习水准测量的基本原理和连续测量的原理以及几个有关水准测量的概念。
首先讲解基本原理。
一、基本原理水准测量的原理:利用水准仪建立一条水平视线,并借助水准尺来测定地面两点间的高差,从而由已知点的高程推算出未知点的高程。
下面根据示意图来详细讲解水准测量的原理。
A 、B 为地面两点,A 点高程已知,B 点高程未知,现在要求AB 两点间高差,那如何实现呢?水准测量一般由已知高程点A 开始向待测点B 方向行进。
已知点A (也称为后视点),根据高程的定义,其高程为HA (指图)到大地水准面的垂直距离;未知高程点B 称为前视点,其高程为HB (指图)。
在AB 两点大约中间处安置水准仪(指图),在A 、B 点上分别放置水准尺(分别称为后视尺和前视尺)(指图),利用水准仪提供的水平视线分别在水准尺A 上的读数a (称为后视读数)(指图),在水准尺B 上的读数b (称为前视读数)(指图),则A 、B 两点间的高差为: HA + a = HB+b ,HB-HA = hAB=a-b (指图)=后视读数-前视读数。
HB=HA + hAB = HA + (a-b)这种方法称为高差法。
HA + a (指图)为视线高或仪器高,以Hi 表示,则待求点高程等于视线高减去前视读数,即HB = Hi-b ,这种方法称为视线高法或仪高法若a >b ,则hAB >0,说明B 点高于A 点;若a <b ,则hAB <0,说明B 点低于A 点;若a=b ,则hAB=0,说明B 点与A 点等高;也就是说高差hAB 具有方向性,是有符号的。
例1:设已知点A 高程为45.123m ,B 为待求点。
后视读数a=1.732m ,前视读数b=1.243m ,请问A 、B 两点哪点高,并求B 点高程?解:1、hAB = H B -H A =a-b=1.732-1.243=0.489 >0由此可知,B 点高于A 点。
2、HB= HA+ hAB=45.123+0.489=45.612m例2:在例1,若a=1.243m , b=1.732m ,则hAB = -0.489 <0解:B 点低于A 点。
HB= 44.634m上面介绍的高差法:它是利用高差来计算高程的方法。
(适用于安置一次仪器测定一个前视点高程时采用,比如,水准路线的测量。
)后视点前视点H A +a视线高法:它是利用视线高来计算高程的方法。
(适用于安置一次仪器测定多个前视点高程时采用)这种方法常用于线路测量(譬如纵横断面测量)和施工放样测量(指图)。
BM1为已知水准点,要求线路中线各桩的高程,常常采用视线高法,在距BM1、0+000、0+050、0+100各点大约等距离处1安置水准仪,在BM1点立水准尺,测得视线高Hi=H1+a,然后分别在0+000、0+050、0+100各点立水准尺,测得前视读数并b1、b2、b3等,即可求得各点高程。
这种视线高法能提高工作效率,提高测量精度。
关于线路测量在第11章会详细讲解。
下面我们接着学习(连续水准测量)二、连续水准测量在实际水准测量中,A、B两点间相距较远或者两点高差较大(指图),安置一次水准仪不能测定两点之间的高差,需要连续多次安置仪器才能测出两点间的高差。
如图所示(指图),沿A、B的水准路线增设若干个必要的临时立尺点,如图中的TP1\TP2……,这些点我们称之为转点(用作传递高程的),这样A、B间高差分为若干段高差之和。
根据水准测量的原理依次连续测定相邻各点间高差,求和即可求得到A、B间的高差值。
首先在A点和转点TP1大致中间处安置水准仪(指图),分别在A点和TP1立水准尺,分别读取读数a1、b1(指图),即可求得h1;同法可以测出h2……一直到hn。
显然,每安置一次仪器,便可测得一个高差,即h 1 = a 1 -b 1h 2 = a 2 -b 2………hn=an-bn。
则h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b则B点的高程为结论:A 、B两点间的高差等于后视读数之和减去前视读数之和最后介绍几个相关概念,掌握这些概念有助于同学们更容易理解和掌握水准测量。
三、几个概念1、测站:测量仪器所安置的点。
(不管是水准仪还是以后要学的经纬仪或其他仪器)2、后视:水准路线的后视方向。
(与前进方向相对的方向)3、前视:水准路线的前视方向。
(与前进方向一致的方向)4、视距:水准仪至标尺的水平距离。
(用于计算水准路线的长度)5、转点:水准测量中起传递高程作用的中间点。
(转点处要放尺垫)6、水准点:水准测量的固定标志点。
7、水准点高程:指标志点顶面的高程。
(不管标志离地面多高,比如标志点是一根很长的木桩)8、水准路线:进行水准测量时所行走的路线。
小结1、水准测量原理即为利用水准仪观测立在地面两点上的水准标尺,分别读取尺上的读数来计算两点间的高差。
这样,由一个已知高程的地面点就可以推测地面上待求点的高程。
hAB = a-b,HB=HA+hAB2、连续水准测量:hAB=Σai-Σbi,3、几个概念,掌握理解前视、后视、视距等概念有助于同学们学好水准测量。
同学们,大家好,今天我们来学习水准仪的结构和水准仪的操作。
主要介绍DS3水准仪的构造与使用,以及对精密、自动安平、电子水准仪做个简单介绍。
3.2 DS3水准仪的介绍及操作水准测量所使用的仪器为水准仪,工具为水准尺和尺垫。
水准仪的作用是提供一条水平视线。
水准仪按其精度可分为DS05、DSl、DS3和DSl0等,字母和数字有何含义呢?字母DS代表“大地测量”和“水准仪”,取其第一个字母;数字表示精度,即每公里往返高差的中误差,05表示每公里往返高差的中误差0.5mm,10表示每公里往返高差的中误差10mm,那你们说数字越大越好或者说数字越大精度就越高呢?对,数字越小表示精度越高。
按自动化程度分:微倾式、自动安平、电子水准仪。
(指图介绍仪器),DS1以上精度的水准仪称为精密水准仪,主要用于一、二等高程控制测量中();DS3级水准仪或自动安平水准仪广泛用于三、四等高程控制测量、图根控制和工程测量中。
下面介绍DS3微倾式的结构。
3.2.1、DS3水准仪的结构水准仪主要有望远镜、水准器及基座三部分组成(指图)。
这是DS3水准仪每个部件的名称,在这里,希望同学们熟悉每个部件叫什么和干什么用的。
水准仪的结构在测绘仪器中是比较简单的,外部可操作的螺旋不多,有制动螺旋、微动螺旋、微倾螺旋、调焦螺旋、脚螺旋、目镜调焦螺旋等。
下面来看望远镜的结构1.望远镜DS3水准仪望远镜主要由物镜、物镜调焦螺旋、调焦透镜、十字丝分划板、目镜、目镜调焦螺旋等组成。
物镜和目镜多采用复合透镜组,调焦透镜为凹透镜。
(指图)这条水平线和竖直线是相互垂直的,分别称为横(或中丝)和竖丝,竖丝用来瞄准目标的,横丝用来读数的。
上下丝(称为视距丝),是用来测定距离的。
在这里,我们要掌握一个很重要的概念,•视准轴CC——物镜中心与十字丝分划板中心的连线。
这条线不是实际存在的线,而是一条虚线。
其重要性在于:水准测量是在视准轴水平时,用十字丝的中丝截取水准尺上的读数。
望远镜成像原理:当观测目标通过物镜组后,形成一个倒立的缩小实像,调节物镜调焦螺旋使缩小的实像清晰地反映在十字丝分划板上,目镜的作用是放大,人眼通过目镜可以看到同时放大了的十字丝和目标影像。
DS3的放大倍数(28)(从望远镜内所看到的目标影像的视角与人眼直接观察该目标的视角之比。
)2.水准器:水准器是用来指示视线是否水平或仪器竖轴是否竖直的装置。
有圆水准器和管水准器两种。
圆水准器用来指示竖轴是否竖直;管水准器用来指示视准轴是否水平。
(1)圆水准器(指图)这是圆水准器,这是平面图,这是剖面图。
圆水准器的内壁是球面,中间有小圆圈,圆圈的中心就是圆水准器的零点。
通过零点的球面法线为圆水准器轴线L′L′(指图)。
当气泡居中时,该轴线处于竖直位置。
当气泡中心偏移零点2mm,轴线所倾斜的角值,称为圆水准器的分划值。
其分划值为:8′-10′。
由于它的精度较低,故只用于仪器的概略整平。
(2)管水准器又称水准管。
里面固装了酒精和乙醚的混合液而成气泡。
由于气泡较轻,所以处于管内最高位置。
(指图)这是水准管的平面图,这是剖面图。
水准管上一般刻有间隔为2mm的分划线,分划线的中点称为水准管零点。
通过零点作水准管圆弧的切线,称为水准管轴LL。
当水准管的气泡居中时,说明水准管轴处于水平位置。