RETRAN-3D程序PWR DNB模型评价研究
- 格式:pdf
- 大小:544.96 KB
- 文档页数:8

三维模型质量检查系统的研究与实践陈彦林;林源;邓博文【摘要】With the application of MBD technology,the three-dimensional model becomes the only source of product information expression,the only carrier for designing and manufacturing information transmission and the only basis for production and manufacturing,and its quality is increasingly impor-tant.According to the enginedesign,technology,manufacturing specifications and the standards of CAD /CAM data quality inspection,the quality inspection system of 3D model are studied and developed in this paper to solve the problem existing in manual quality inspection of the 3D model.It was used in the process of developing the liquid propellant rocket engine.The efficient and rapid quality inspection of the three-dimensional model was achieved to reduce the repeated design caused by the quality problem of three-dimensional model,which has promoted the quality improvement of three-dimensional model of the model to ensure that the three-dimensional model meets the requirements of follow-up intelligent manufac-turing and shorten the development cycle of the products.%随着MBD技术的应用,三维模型成为产品信息表达的唯一源头、设计制造信息传递的唯一载体、生产制造的唯一依据,其质量日益重要.针对液体火箭发动机三维模型质量人工检查存在的问题,依据发动机设计、工艺、制造规范以及CAD/CAM数据质量检查方面的标准,研究并开发了三维模型质量检查系统,并在液体火箭发动机研制过程中进行了应用,实现了三维模型质量的高效、快速检查,减少由于三维模型质量问题引起的设计反复,促进了发动机三维模型设计质量的提升,确保三维模型满足后续智能制造要求,缩短产品的研制周期.【期刊名称】《火箭推进》【年(卷),期】2018(044)002【总页数】7页(P88-94)【关键词】液体火箭发动机;三维模型;质量检查【作者】陈彦林;林源;邓博文【作者单位】西安航天动力研究所,陕西西安710100;西安航天动力研究所,陕西西安710100;西安航天动力研究所,陕西西安710100【正文语种】中文【中图分类】V430-340 引言采用新的基于模型定义(MBD)技术和全三维下厂模式开展发动机数字化协同研制后,传统的二维纸质工程图被数字化的三维模型所取代,三维模型作为产品信息的唯一源头和设计制造信息传递的唯一载体,已成为工程分析、数字模装、工装设计、工艺规划、数控编程等后续工作的主要数据基础,也是最终生产制造的唯一依据,因此三维模型的质量在发动机研制过程中显得越来越重要。

基于Wiener退化模型的可靠性评价方法研究摘要:本文研究了有两个加速变量,带随机效应的Wiener退化模型的退化问题。
基于Wiener退化模型,本文讨论了模型参数和可靠度的区间估计问题。
研究了检验随机效应和两个应力是否存在交互作用的检验问题。
并给出了检验统计量和拒绝域。
蒙特卡罗模拟证明了本文提供的方法的可行性。
最后,发光二极管实例进一步证明了本文提供的方法的可行性。
关键词:加速退化试验;广义置信区间;随机效应;可靠度一、引言随着科学技术的发展, 高可靠产品越来越多。
由于高可靠产品即使在加速寿命试验情形也很难收集到失效数据, 因此很难用传统的基于失效数据的统计方法来评价这些产品的可靠性。
人们注意到产品的性能随着产品使用时间的增加而发生退化,因此可以利用产品的退化数据对高可靠产品的可靠性进行评估。
现在基于产品性能的退化数据进行可靠性分析的技术是当前可靠性领域的研究热点之一。
文[1]说明了产品的可靠性指标可以通过退化数据来估计。
其他关于退化的文献可以查看文[2-3]。
加速退化试验是研究退化的一种重要方法,恒加试验, 步加试验, 序加试验是三中常用的加速退化试验。
常用的随机过程模型有Wiener过程, Gamma过程和Inverse Gaussian过程。
在上述的三中随机过程模型中, Wiener过程是应用相对较广泛的一种。
本文基于带随机效应的Wiener过程, 研究有两个加速变量的加速退化问题。
上述方法主要考虑了参数的点估计问题, 本文侧重考虑模型参数和可靠性指标的区间估计问题。
区间估计比点估计有其优越性, 能在一定的概率下知道相关量的取值范围。
传统的区间估计方法, 例如Wald区间或者bootstrap区间, 依赖于大样本性, 在样本量较大时, 有比较好的结果, 但是, 当样本量比较小的时候, 比较难得到好的结果。
本文基于广义枢轴量, 研究了小样本下相关量的区间估计问题, 其操作容易, 在样本量比较小时, 也能有比较好的结果。

Cn3D 4.1中文使用手册Yang Xin(yx3240106@)翻译生物秀Welcome to the Cn3D 4.1 Tutorial! 目录•简介o Cn3D的基本功能o下载和安装Cn3Do文档约定o参考文献•寻找特定的结构(MMDB)o根据Entrez文献研究o根据Entrez 临近序列o通过BLAST搜索o通过已知的PDB标识•在Cn3D中察看特定的序列结构o Cn3D的基本控制操作结构窗体的主菜单样式面板o Cn3D的序列阅读器•结构比较(VAST)o在Cn3D中察看结构比较结果Cn3D的比对察看器Cn3D的比对模块•导入和保存o导入序列和空间结构o可见的序列保守性•注释结构o骨架和界标o自定义样式•保存空间结构和图像o将Cn3D用于交互式图形•高级设置o动画控制o显示无序晶体o类型搜寻o导入用户PDB文件•比对编辑o使用编辑器o校正队列错误o将序列合并到多重序列中简介这是 Cn3D 4.1的使用手册。
希望能够向初次使用或是曾经使用过Cn3D的用户提供一个关于本软件的基本特点的指导。
新用户可能希望通过阅读这篇文档来学习如何使用Cn3D,而有经验的用户则可以通过上面的目录和超连接直接跳转到自己感兴趣的章节。
本手册并不是对程序功能的详尽的介绍。
在Cn3D的安装程序里包含有关于Cn3D的用户界面和详细功能介绍的帮助文档。
—见Cn3D_Commands.chm。
Cn3D 的基本功能Cn3D 是一个生物分子的三维结构、序列以及序列比对结果的可视化工具。
Cn3D可以将结构与序列的信息紧密的联系起来,这是它与其它软件的一个重要的区别:例如,一名科学家可以很快的从晶体结构中找出与导致已知疾病的突变相关的残基,或是保留同源序列家族的活性位点的残基。
Cn3D可以通过基于结构的序列比较来显示生物分子结构之间的比较,从而了解相关蛋白的那一个结构域在结构与序列上表现得更为保守。
同时,可以自定义标签的特性,高品质的OpenGL 的画质,还有多样的文件输出格式,都使得Cn3D成为文献注释的强大工具。

结构非线性分析与性能评价软件PERFORM-3D苏志彬;林述涛【期刊名称】《建筑结构》【年(卷),期】2007(37)B03【摘要】PERFORM-3D(Nonlinear Analysis and Performance Assessment for 3D Structure)三维结构非线性分析与性能评估软件,其前身为Drain.2DX 和Drain.3DX,由美国加州大学伯克利分校的Powell教授开发,是一个用于抗震设计的非线性计算软件。
通过基于变形或强度的限制状态对复杂结构(其中包括剪力墙结构)进行非线性分析,。
PERFORM.3D为用户提供了一个强大的地震工程分析工具来进行静力Pushover分析和非线性动力时程分析。
可以同时在一个模型中实现静力或动力非线性分析,荷载可以任意顺序施加,如完成动力时程分析后进行静力Pushover分析。
【总页数】3页(P25-27)【关键词】结构非线性分析;性能评价;评估软件;Pushover分析;非线性动力时程分析;Powell;美国加州大学;剪力墙结构【作者】苏志彬;林述涛【作者单位】北京金土木软件技术有限公司,100044【正文语种】中文【中图分类】TU323.301【相关文献】1.SAPTIS:结构多场仿真与非线性分析软件开发及应用(之三) [J], 张磊;张国新2.SAPTIS:结构多场仿真与非线性分析软件开发及应用(之四) [J], 刘有志;张国新;杨萍3.沥青路面结构两款轴对称非线性有限元分析软件应用之比较 [J], 蒋鑫;姜金;姚康;吴朝阳;古含焱;邱延峻4.基于静力非线性分析的钢筋混凝土框架结构性能评价 [J], 刘斌强5.基于GPU并行计算的地下结构非线性动力分析软件平台开发 [J], 曹胜涛;路德春;杜修力;赵密;程星磊因版权原因,仅展示原文概要,查看原文内容请购买。
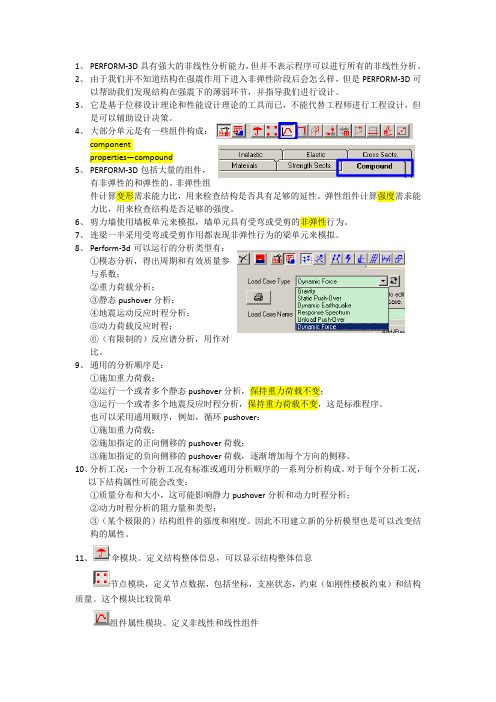
1、PERFORM-3D具有强大的非线性分析能力,但并不表示程序可以进行所有的非线性分析。
2、由于我们并不知道结构在强震作用下进入非弹性阶段后会怎么样,但是PERFORM-3D可以帮助我们发现结构在强震下的薄弱环节,并指导我们进行设计。
3、它是基于位移设计理论和性能设计理论的工具而已,不能代替工程师进行工程设计,但是可以辅助设计决策。
4、大部分单元是有一些组件构成:componentproperties—compound5、PERFORM-3D包括大量的组件,有非弹性的和弹性的。
非弹性组件计算变形需求能力比,用来检查结构是否具有足够的延性。
弹性组件计算强度需求能力比,用来检查结构是否足够的强度。
6、剪力墙使用墙板单元来模拟,墙单元具有受弯或受剪的非弹性行为。
7、连梁一半采用受弯或受剪作用都表现非弹性行为的梁单元来模拟。
8、Perform-3d可以运行的分析类型有:①模态分析,得出周期和有效质量参与系数;②重力荷载分析;③静态pushover分析;④地震运动反应时程分析;⑤动力荷载反应时程;⑥(有限制的)反应谱分析,用作对比。
9、通用的分析顺序是:①施加重力荷载;②运行一个或者多个静态pushover分析,保持重力荷载不变;③运行一个或者多个地震反应时程分析,保持重力荷载不变,这是标准程序。
也可以采用通用顺序,例如,循环pushover:①施加重力荷载;②施加指定的正向侧移的pushover荷载;③施加指定的负向侧移的pushover荷载,逐渐增加每个方向的侧移。
10、分析工况:一个分析工况有标准或通用分析顺序的一系列分析构成。
对于每个分析工况,以下结构属性可能会改变:①质量分布和大小,这可能影响静力pushover分析和动力时程分析;②动力时程分析的阻力量和类型;③(某个极限的)结构组件的强度和刚度。
因此不用建立新的分析模型也是可以改变结构的属性。
11、`伞模块。
定义结构整体信息,可以显示结构整体信息节点模块,定义节点数据,包括坐标,支座状态,约束(如刚性楼板约束)和结构质量。
第 54 卷第 11 期2023 年 11 月中南大学学报(自然科学版)Journal of Central South University (Science and Technology)V ol.54 No.11Nov. 2023融合RRT-Connect 和DWA 算法的室内移动机器人单目标点导航任务研究王冠强1, 2,张驰洲2, 3,陈明松2, 3,蔺永诚1, 2,邹奋扬1, 2,王秋2, 3,吴敏杰1, 2,曾维栋1, 2(1. 中南大学 机电工程学院,湖南 长沙,410083;2. 极端服役性能精准制造全国重点实验室,湖南 长沙,410083;3. 中南大学 轻合金研究院,湖南 长沙,410083)摘要:针对室内复杂环境下移动机器人单目标点导航问题,提出一种基于改进双向快速扩展随机树(RRT-Connect)算法与改进动态窗口法(dynamic window approach ,DWA)的单目标点导航算法。
首先,结合人工势场法与RRT-Connect 算法设计全局规划器,并引入范围限定函数及两棵双向RRT 随机树进行扩展,优化采样和路径扩展过程,同时对全局规划器生成的路径进行平滑处理;然后,改进DWA 中的评价函数,以目标点距离函数代替航向角函数以加快算法收敛并避免角度反复调整,同时实现机器人的高效动态避障;最后,以全局规划器的路径点为引导,对局部规划器进行融合以完成单目标点导航任务。
研究结果表明:本文所提出的规划器能够实现机器人在复杂环境下的自主路径规划和避障;相比于其他方法,本文所提出的方法效率高,规划路径短。
关键词:路径规划;动态避障;RRT-Connect ;DWA ;人工势场法中图分类号:TP24 文献标志码:A 文章编号:1672-7207(2023)11-4326-12Research on single-target point navigation task of indoor mobilerobot integrating RRT-Connect and DWA algorithmsWANG Guanqiang 1, 2, ZHANG Chizhou 2, 3, CHEN Mingsong 2, 3, LIN Yongcheng 1, 2,ZOU Fenyang 1, 2, WANG Qiu 2, 3, WU Minjie 1, 2, ZENG Weidong 1, 2(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;2. State Key Laboratory of Precision Manufacturing for Extreme Service Performance, Changsha 410083, China;3. Light Alloy Research Institute, Central South University, Changsha 410083, China)Abstract: Aiming at the single-target point navigation problem of mobile robots in complex indoor environments,收稿日期: 2022 −11 −11; 修回日期: 2022 −12 −13基金项目(Foundation item):国家重点研发计划项目(2022YFB3706902);湖南省研究生科研创新项目(CX20220264) (Project(2022YFB3706902) supported by the National Key Research and Development Program of China; Project(CX20220264) supported by the Postgraduate Scientific Research Innovation Program of Hunan Province)通信作者:陈明松,博士,教授,从事移动机器人与复杂机电系统研究;E-mail :****************.cnDOI: 10.11817/j.issn.1672-7207.2023.11.011引用格式: 王冠强, 张驰洲, 陈明松, 等. 融合RRT-Connect 和DWA 算法的室内移动机器人单目标点导航任务研究[J]. 中南大学学报(自然科学版), 2023, 54(11): 4326−4337.Citation: WANG Guanqiang, ZHANG Chizhou, CHEN Mingsong, et al. Research on single-target point navigation task of indoor mobile robot integrating RRT-Connect and DWA algorithms[J]. Journal of Central South University(Science and Technology), 2023, 54(11): 4326−4337.第 11 期王冠强,等:融合RRT-Connect和DWA算法的室内移动机器人单目标点导航任务研究a single-target point navigation algorithm was proposed based on the improved bidirectional rapidly expandingrandom tree(RRT-Connect) and the improved dynamic window approach(DWA) methods. Firstly, a global planner was designed by combining the artificial potential field method and the RRT-Connect algorithm, and a range limiting function and two bidirectional RRT random trees were introduced for expansion, optimizing the sampling and path expansion process. Furthermore, the paths generated by the global planner were also smoothed during the sampling and path expansion. Secondly, the heading angle function in DWA was replaced by the distance function of the target point to speed up the algorithm convergence and avoid repeated angle adjustment, and at the same time to realize the efficient dynamic obstacle avoidance of the robot. Finally, guided by the waypoints of the global planner, the local planners were fused to complete the single-target point navigation task. The results show that the planner proposed in this paper can realize autonomous path planning and obstacle avoidance of robots in complex environments. Compared with other methods, the proposed method has high efficiency and short planning paths.Key words: path planning; dynamic obstacle avoidance; RRT-Connect; DWA; artificial potential field路径规划技术是移动机器人领域的一项热门研究[1−2]。
doi:10.3969/j.issn.1003-3114.2024.02.002引用格式:张建华,张骥威,张宇翔,等.面向6G的RIS信道测量与建模研究进展[J].无线电通信技术,2024,50(2):227-237.[ZHANGJianhua,ZHANGJiwei,ZHANGYuxiang,etal.AdvancementsinRISChannelMeasurementandModelingfor6G[J].RadioCommunicationsTechnology,2024,50(2):227-237.]面向6G的RIS信道测量与建模研究进展张建华1,张骥威1,张宇翔2,巩汇文1,田 磊1(1.北京邮电大学信息与通信工程学院,北京100876;2.北京邮电大学集成电路学院,北京100876)摘 要:智能超表面(ReconfigurableIntelligentSurface,RIS)技术被认为是6G中很有应用前景的技术。
RIS信道研究对于RIS辅助通信系统的技术创新和性能评价至关重要。
综述了RIS信道的测量与建模研究进展,总结了基于矢量网络分析仪(VectorNetworkAnalyzer,VNA)的频域测量和基于滑动相关的时域测量两种信道测量方法。
介绍了基于时域的RIS信道测量平台,并对目前的测量活动进行了总结。
分析了RIS信道中的阵元反射系数、散射方向图和级联路径损耗三个特性。
总结了RIS信道统计性建模、确定性建模和混合型建模的方法,给出了一种基于现有5G标准的3D几何统计性信道模型(Geometric BasedStochasticModel,GBSM)扩展的RIS信道建模方法,以及基于此方法的RIS信道仿真平台。
展望了RIS信道测量和建模研究面临的挑战和未来的研究方向。
关键词:智能超表面;信道测量;信道建模;3D几何统计性信道建模中图分类号:TN929.5 文献标志码:A 开放科学(资源服务)标识码(OSID):文章编号:1003-3114(2024)02-0227-11AdvancementsinRISChannelMeasurementandModelingfor6GZHANGJianhua1,ZHANGJiwei1,ZHANGYuxiang2,GONGHuiwen1,TIANLei1(1.SchoolofInformationandCommunicationEngineering,BeijingUniversityofPostsandTelecommunications,Beijing100876,China;2.SchoolofIntegratedCircuits,BeijingUniversityofPostsandTelecommunications,Beijing100876,China)Abstract:ReconfigurableIntelligentSurface(RIS)technologyisconsideredapromisingapplicationin6G.TheresearchonRISchannelsiscrucialfortechnologicalinnovationandperformanceevaluationofRISassistedcommunicationsystems.ThisarticlereviewstheresearchprogressinmeasurementandmodelingofRISchannels.Wesummarizedtwochannelmeasurementmethods,frequencydo mainmeasurementbasedonVectorNetworkAnalyzer(VNA)andtime domainmeasurementbasedonslidingcorrelation.Weintro ducedatime domainRISchannelmeasurementplatformandsummarizedcurrentmeasurementactivities.Threecharacteristicsofelementreflectioncoefficient,scatteringpattern,andcascadedpathlossinRISchannelsareanalyzed.AsummaryofRISchannelmodel ingmethods,includingstatisticalmodeling,deterministicmodeling,andhybridmodeling,ispresented.AnextendedRISchannelmodelingmethodbasedonexisting5Gstandard s3DGeometric BasedStochasticModel(GBSM)isproposed,aswellasanRISchan nelsimulationplatformbasedonthismethod.Finally,challengesandfutureresearchdirectionsfacedbyRISchannelmeasurementandmodelingresearchwerediscussed.Keywords:RIS;channelmeasurement;channelmodeling;3DGBSM收稿日期:2023-11-27基金项目:国家重点研发计划(2023YFB2904805);国家自然科学基金青年科学基金(62101069,62201087);国家自然科学基金重点项目(92167202);国家杰出青年科学基金(61925102)FoundationItem:NationalKeyR&DProgramofChina(2023YFB2904805);YoungScientistsFundoftheNationalNaturalScienceFoundationofChina(62101069,62201087);KeyProgramofNationalNaturalScienceFoundationofChina(92167202);NationalScienceFundforDistinguishedYoungScholars(61925102)0 引言随着5G移动通信系统已在全球范围内部署,6G移动通信技术的研究正在广泛开展,预计在2030年实现商用[1]。
Nuclear Science and Technology 核科学与技术, 2015, 3, 60-69Published Online July 2015 in Hans. /journal/nst/10.12677/nst.2015.33010Comparative Study of the Wall HeatTransfer Model between the RETRAN-3Dand RELAP5 CodeJiange Liu, Jianmin Zhu, Jun Chen, Xiangang FuChina Nuclear Power Technology Research Institute, Shenzhen GuangdongEmail: kk12357890@Received: Jun. 20th, 2015; accepted: Jul. 6th, 2015; published: Jul. 9th, 2015Copyright © 2015 by authors and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY)./licenses/by/4.0/AbstractThe characteristics of the RETRAN-3D and the RELAP5 code are summarized. The selection origin of the wall heat transfer in the two codes is briefly analyzed. The heat transfer model and the crit-ical heat flux model are listed and compared. The differences of the water-steam table are also in-troduced. The results show that: there are clearly differences in the choosing wall heat transfer correlations, as the different number of field equations and the keystone of solving the nuclear thermal-hydraulic system behavior are different. Two codes use different method to calculate the critical heat flux: the RETRAN-3D code adopts many experiential correlations to obtain the critical heat flux and the RELAP5 code adopts the look up table method. It must firstly carry out the code capability assessment and use the code in its applicability scopes. It is necessary to study the un-certainty of wall heat transfer correlations, critical heat flux and water property.KeywordsRETRAN-3D Code, RELAP5 Code, Wall Heat Transfer Correlation, Critical Heat FluxRETRAN-3D和RELAP5程序壁面换热模型比较研究刘建阁,朱建敏,陈军,傅先刚中科华核电技术研究院,广东深圳Email: kk12357890@收稿日期:2015年6月20日;录用日期:2015年7月6日;发布日期:2015年7月9日摘要本文调研总结了RETRAN-3D和RELAP5程序的特点,分析了两个程序选择壁面换热模型的根本出发点,比较了两个程序所选用的壁面换热模型和临界热流密度计算方法,比较了水物性表的不同,简要分析了两者之间的差异。
基于DNN模型输出差异的测试输入优先级方法朱进;陶传奇;郭虹静【期刊名称】《计算机科学》【年(卷),期】2024(51)S01【摘要】深度神经网络测试需要大量的测试数据来保证DNN的质量,但大多数测试输入缺乏标注信息,而且对测试输入进行标注会带来高昂的人工代价。
为了解决标注成本的问题,研究人员提出了测试输入优先级方法,筛选高优先级的测试输入进行标注。
然而,大多数优先级方法都受到有限情景的影响,例如难以筛选出高置信度的误分类输入。
为了应对上述挑战,文中将差分测试技术应用于测试输入优先级,并提出了基于DNN模型输出差异的测试输入优先级方法(DeepDiff)。
DeepDiff首先构建一个与原始模型具有相同功能的差分模型,然后计算测试输入在原始模型与差分模型之间的输出差异,最后为输出差异较大的测试输入分配更高的优先级。
在实验验证中,我们对4个广泛使用的数据集和相应的8个DNN模型进行了研究。
实验结果表明,在原始测试集上,DeepDiff的有效性比基线方法平均高出13.06%,在混合测试集上高出39.69%。
【总页数】8页(P818-825)【作者】朱进;陶传奇;郭虹静【作者单位】南京航空航天大学计算机科学与技术学院;高安全系统的软件开发与验证技术工信部重点实验室;计算机软件新技术国家重点实验室;软件新技术与产业化协同创新中心【正文语种】中文【中图分类】TP311【相关文献】1.基于液压模型的功率MOSFET有效输出电容测试方法2.基于1D-Concatenate 的信道估计DNN模型优化方法3.基于水印神经网络的可溯源DNN模型保护方法4.基于集成Dropout-DNN模型的盾构掘进速度预测方法5.基于GD-DNN模型的岩爆烈度等级预测方法与应用因版权原因,仅展示原文概要,查看原文内容请购买。