李雅普诺夫稳定性分析(二)
- 格式:ppt
- 大小:369.00 KB
- 文档页数:31

李雅普诺夫第二方法判断负定嘿,咱今儿来聊聊李雅普诺夫第二方法判断负定这事儿啊!这可真是个有点奇妙的玩意儿呢。
你想啊,就好像咱在走一条路,得判断这条路是不是稳当,能不能走得通。
李雅普诺夫第二方法就像是个厉害的导航仪,帮咱看清这条路的情况。
说起来,这负定是个啥呢?它就好像是个标志,告诉我们系统是不是稳定地朝着某个方向走。
如果是负定的,那就好像有个小箭头一直指着稳定的方向,让我们心里有底。
咱可以想象一下,一个摇摇晃晃的不倒翁,它为啥不会倒呢?就是因为它内在有某种力量在维持着平衡呀,这就有点像负定的感觉。
当系统呈现出负定时,就好像不倒翁找到了自己的平衡之道。
那怎么用李雅普诺夫第二方法去判断这个负定呢?这可得有点技巧啦!就像我们要分辨一个东西是好是坏,得从各个方面去观察、去分析。
要看看那些个数学式子啦,函数啦,是不是符合负定的特征。
这可不是随随便便就能搞定的事儿哦!得仔细琢磨,认真思考。
就好像解一道很难的谜题,得一点点地去寻找线索,去拼凑出答案。
你说,要是咱能轻松地就用这个方法判断出负定,那该多厉害呀!就像有了一双火眼金睛,能看穿一切不稳定的因素。
而且哦,这李雅普诺夫第二方法可不只是在数学里有用,在好多实际问题中也大有用处呢!比如说在工程领域,要是能判断出系统是不是稳定负定,那就能保证工程的安全和可靠啦。
想象一下,如果一座大桥在建造的时候没有考虑到稳定性,那后果得多可怕呀!但有了李雅普诺夫第二方法,就好像给大桥加上了一道保险,让我们能放心地走在上面。
总之呢,李雅普诺夫第二方法判断负定这事儿,真的是很有意思也很重要的。
我们得好好去研究它,去掌握它,让它为我们的学习和工作带来帮助呀!难道不是吗?这可真的是值得我们花时间和精力去弄明白的呀!。
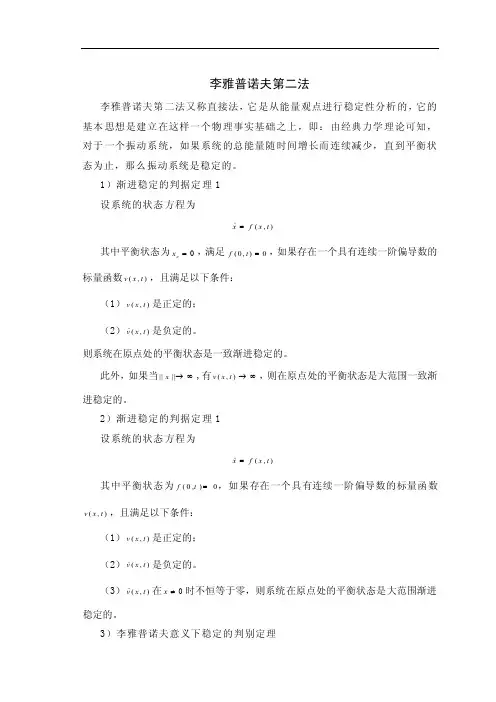
李雅普诺夫第二法李雅普诺夫第二法又称直接法,它是从能量观点进行稳定性分析的,它的基本思想是建立在这样一个物理事实基础之上,即:由经典力学理论可知,对于一个振动系统,如果系统的总能量随时间增长而连续减少,直到平衡状态为止,那么振动系统是稳定的。
1)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为0e x =,满足(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
则系统在原点处的平衡状态是一致渐进稳定的。
此外,如果当||||x →∞,有(,)v x t →∞,则在原点处的平衡状态是大范围一致渐进稳定的。
2)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
(3)(,)v x t 在0x ≠时不恒等于零,则系统在原点处的平衡状态是大范围渐进稳定的。
3)李雅普诺夫意义下稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是负定的。
v x t(3)则系统在原点处的平衡状态在李雅普诺夫意义下是一致稳定的。
4)不稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是正定的。
v x t则系统在原点处的平衡状态是不稳定。

5.6.3 二次型最优控制问题现在我们来研究最优控制问题。
已知系统方程为Bu Ax x+= (5.20) 确定最优控制向量)()(t Kx t u -=(5.21) 的矩阵K ,使得性能指标(5.22)达到极小。
式中Q 是正定(或正半定)Hermite 或实对称矩阵,R 是正定Hermite 或实或实对称矩阵。
注意,式(5.22)右边的第二项是考虑到控制信号的能量损耗而引进的。
矩阵Q 和R 确定了误差和能量损耗的相对重要性。
在此,假设控制向量)(t u 是不受约束的。
正如下面讲到的,由式(5.21)给出的线性控制律是最优控制律。
所以,若能确定矩阵K 中的未知元素,使得性能指标达极小,则)()(t Kx t u -=对任意初始状态x (0)而言均是最优的。
图5.6所示为该最优控制系统的结构方块图。
图5.6 最优控制系统现求解最优控制问题。
将式(5.21)代入式(5.20),可得()xAx BKx A BK x =-=- 在以下推导过程中,假设BK A -是稳定矩阵,BK A -的所有特征值均具有负实部。
将式(5.21)代入(5.22),可得⎰⎰∞∞+=+=0)()(xdtRK K Q x dtRKx K x Qx x J H H H H H依照解参数最优化问题时的讨论,取⎰∞+=0)(dtRu u Qx x J HH)()(Px x dtd x RK K Q x HH H -=+ 式中的P 是正定的Hermite 或实对称矩阵。
于是])()[()(x BK A P P BK A x x P x Px xx RK K Q x H H H H H H -+--=--=+ 比较上式两端,并注意到方程对任意x 均应成立,这就要求)()()(RK K Q BK A P P BK A H H +-=-+-(5.23)根据Lyapunov 第二法可知,如果BK A -是稳定矩阵,则必存在一个满足式(5.23)的正定矩阵P 。

基于MATLAB的李雅普诺夫第二法稳定性分析李雅普诺夫第二法是一种广泛应用于非线性动力系统稳定性分析的方法。
在MATLAB中,我们可以利用多种功能和工具来实现这种分析。
在本文中,将介绍如何使用MATLAB进行李雅普诺夫第二法稳定性分析。
首先,我们将介绍李雅普诺夫第二法的基本概念,然后是在MATLAB中实现该方法的步骤和示例。
李雅普诺夫第二法是一种通过具有特定属性的李雅普诺夫函数来判断非线性系统的稳定性的方法。
具体来说,李雅普诺夫第二法通过找到一个正定函数V(x)以及一个正数a和b,使下式成立:a,x,^2≤V(x)≤b,x,^2其中x是系统状态,x,^2表示欧几里德范数的平方,a和b是正定的。
如果满足这个不等式,那么系统就是稳定的。
现在,我们将介绍在MATLAB中实现李雅普诺夫第二法的步骤。
首先,我们需要编写系统的状态方程。
这可以通过定义一个MATLAB函数来实现。
例如,考虑以下非线性系统:dx/dt = f(x)其中x是系统状态,f(x)是非线性函数。
我们可以将此方程定义为一个名为f.m的函数,它将系统状态作为输入,并返回状态变量的导数。
下面是一个简单的f.m文件的示例:function dxdt = f(x)dxdt = x^2 - x^4;接下来,我们需要选择一个合适的李雅普诺夫函数V(x)。
我们可以通过考虑系统的能量来选择一个合适的函数。
在这种情况下,我们可以选择V(x) = x^2,因为它是系统能量的一种度量方式。
然后,我们需要计算李雅普诺夫函数的时间导数Vdot(x)。
这可以通过将李雅普诺夫函数应用于系统的状态方程来实现。
在MATLAB中,我们可以利用符号计算工具箱来实现这一点。
下面是一个计算Vdot(x)的示例代码:syms xf_sym = x^2 - x^4;V=x^2;Vdot = diff(V, x) * f_sym;最后,我们需要使用MATLAB的求解器来满足条件的李雅普诺夫函数。
c et c y前页返回2 2c aet c y()xV&22xμ−=返回前页求出系统的李雅普诺夫第二法的基本思想ce tcy 1x 返回前页定理3渐近稳定cae tcy ()00≠=但x V&返回前页定理3⎪⎩⎪⎨⎧−−==21221x m x m k x x xμ&&⎥⎦⎤⎢⎣⎡=00e x 渐近稳定et c y返回前页1 xca e tcy ⎪⎩⎪⎨⎧−==1221x m k x x x &&⎥⎦⎤⎢⎣⎡=00e x 返回前页定理4李雅普诺夫意义下稳定cet c y1x返回前页定理3不稳定ca e tcy ()00≡=但x V&返回前页定理3⎪⎩⎪⎨⎧+−==21221x m x m k x x x μ&&⎥⎦⎤⎢⎣⎡=00e x 不稳定状态平面图状态仿真曲线注意tcy 前页返回前图?李氏函数选择不当!cet c y返回前页定理3et c y返回前页e虚构atcae tcy ()=V x ()02221>+=x x V x ()0 ≡x V &()0222≤−=x V x &ec ayt c etcy 返回前页定理4cae tcy ⎥⎦⎤⎢⎣⎡=0n πe x ⎪⎩⎪⎨⎧−== x L gx x x1221sin &&状态仿真曲线李雅普诺夫意义下稳定返回前页tcy 0≡返回前页定理3cae tcy 状态平面图状态仿真曲线()00≡=但x V&⎪⎩⎪⎨⎧−== x L g x x x1221sin &&2Dx −()L ,,,nn πe 2100±±=⎥⎦⎤⎢⎣⎡=x 垂直向下渐近稳定前页返回cae tcy 相平面图θL。