平面极坐标
- 格式:ppt
- 大小:1.26 MB
- 文档页数:30

第四章平面问题的极坐标解答§4-1 极坐标中的平衡微分方程对于由径向线和圆弧线围成的圆形、圆环形、楔形、扇形等的弹性体,宜用极坐标求解。
因为用极坐标表示其边界线非常方便,从而使边界条件的表示和方程的求解得到很大的简化。
在极坐标中,平面内任一点P的位置,用径向坐标ρ及环向坐标ϕ来表示,图4-1。
极坐标和直角坐标都是正交坐标系,但两者有如下区别:在直角坐标系中,x和y坐标线都是直线,有固定的方向,x和y坐标的量纲都是L。
在极坐标系中,ρ坐标线(ϕ=常数)和ϕ坐标线(ρ=常数)在不同的点有不同的方向;ρ坐标线是直线,而ϕ坐标线为圆ϕ坐标为量纲一的量。
这些区别将引弦曲线;ρ坐标的量纲是L,而起弹性力学基本方程的差异。
为了表明极坐标中的应力分量,从所考察的薄板或长柱形体中取出任一厚度等于1的微分体PACB,在xy平面上,这个微分体是由两条径向线(夹角为d ϕ)和两条环向线(距离为ρd )所围成,如图所示,沿ρ方向的正应力称为径向正应力,用ρσ代表;沿ϕ方向的正 应力称为环向正应力或切向正应力,用ϕσ代表;切应力用ϕρρϕττ及代表(根据切应力的互等关系,ϕρρϕττ=)。
各应力分量的正负号规定和直角坐标中一样,只是ρ方向代替了x 方向,ϕ方向代替了y 方向。
即正面上的应力以沿正坐标方向为正,负面上的应力以沿负坐标方向为正,反之为负。
图中所示的应力分量都是正的。
径向及环向的体力分量分别用ϕρf f 及代表,以沿正坐标方向为正,反之为负。
与直角坐标中相似,由于应力随坐标ρ的变化,设PB 面上的径向正应力为ρσ,则AC 面上的将为ρρσσρρd ∂∂+;同样,这两个面上的切应力分别为ρϕρϕττ及+ρρσϕd ∂∂。
PA 及BC 两个面上的环向正应力分别为ϕσ及ϕσ+ϕρσϕd ∂∂;这两个面上的切应力分别为ϕϕτττϕρϕρϕρd ∂∂+及。
对于极坐标中所取的微分体,应注意它的两个ρ面PB 及AC 的面积不相同,分别等于()ϕϕρϕρd d d +及;两个ϕ面PA 及BC 的面积都等于d ρ,但此两面不平行。

极坐标系知识点关键信息项:1、极坐标系的定义2、极坐标的表示方法3、极坐标与直角坐标的转换公式4、极坐标系中的曲线方程5、极坐标系下的面积计算6、极坐标系在物理学和工程学中的应用11 极坐标系的定义极坐标系是一个二维坐标系,在平面内取一个定点 O,引一条射线Ox,叫做极轴,再选定一个长度单位和角度的正方向(通常取逆时针方向)。
对于平面内任何一点 M,用ρ 表示线段 OM 的长度,θ 表示从 Ox 到 OM 的角度,ρ 叫做点 M 的极径,θ 叫做点 M 的极角,有序数对(ρ,θ) 就叫点 M 的极坐标。
111 极坐标系的特点极坐标系中的点与极径和极角一一对应。
但极角的取值范围一般规定在0, 2π) 内。
112 极坐标系与直角坐标系的区别直角坐标系通过横坐标和纵坐标确定点的位置,而极坐标系通过极径和极角来确定点的位置。
12 极坐标的表示方法点 M 的极坐标可以表示为(ρ,θ),其中ρ 为正数时,表示点 M 在极轴的逆时针方向上与极点 O 的距离为ρ;ρ 为负数时,表示点 M 在极轴的顺时针方向上与极点 O 的距离为|ρ|。
121 极坐标的多值性由于极角的周期性,同一个点在极坐标系中的表示不唯一。
13 极坐标与直角坐标的转换公式设点 M 的直角坐标为(x, y),极坐标为(ρ,θ),则有:x =ρ cosθy =ρ sinθρ² = x²+ y²tanθ = y / x (x ≠ 0)131 转换公式的应用通过这些公式,可以在极坐标和直角坐标之间进行相互转换,便于解决不同类型的问题。
14 极坐标系中的曲线方程常见的极坐标曲线方程有:圆:ρ = a (以极点为圆心,a 为半径的圆)直线:θ =α (过极点且与极轴夹角为α 的直线)141 特殊曲线的极坐标方程推导例如,对于圆心在(a, 0) 且半径为 a 的圆,其极坐标方程为ρ =2a cosθ。
15 极坐标系下的面积计算对于由极坐标曲线围成的区域,其面积可以通过积分来计算。
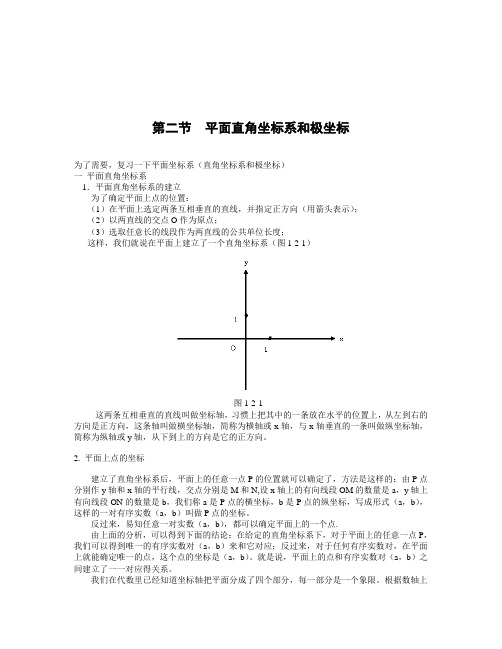
第二节平面直角坐标系和极坐标为了需要,复习一下平面坐标系(直角坐标系和极坐标)一平面直角坐标系1.平面直角坐标系的建立为了确定平面上点的位置:(1)在平面上选定两条互相垂直的直线,并指定正方向(用箭头表示);(2)以两直线的交点O作为原点;(3)选取任意长的线段作为两直线的公共单位长度;这样,我们就说在平面上建立了一个直角坐标系(图1-2-1)图1-2-1这两条互相垂直的直线叫做坐标轴,习惯上把其中的一条放在水平的位置上,从左到右的方向是正方向,这条轴叫做横坐标轴,简称为横轴或x轴,与x轴垂直的一条叫做纵坐标轴,简称为纵轴或y轴,从下到上的方向是它的正方向。
2. 平面上点的坐标建立了直角坐标系后,平面上的任意一点P的位置就可以确定了,方法是这样的:由P点分别作y轴和x轴的平行线,交点分别是M和N,设x轴上的有向线段OM的数量是a,y轴上有向线段ON的数量是b,我们称a是P点的横坐标,b是P点的纵坐标,写成形式(a,b),这样的一对有序实数(a,b)叫做P点的坐标。
反过来,易知任意一对实数(a,b),都可以确定平面上的一个点.由上面的分析,可以得到下面的结论:在给定的直角坐标系下,对于平面上的任意一点P,我们可以得到唯一的有序实数对(a,b)来和它对应;反过来,对于任何有序实数对,在平面上就能确定唯一的点,这个点的坐标是(a,b)。
就是说,平面上的点和有序实数对(a,b)之间建立了一一对应得关系。
我们在代数里已经知道坐标轴把平面分成了四个部分,每一部分是一个象限。
根据数轴上有向线段的数量,可以理解第I 象限内的点的坐标的符号是(+,+),第II 象限内的是(—,+),第III 象限内的是(—,—),第IV 象限内的是(+,—)。
坐标轴上的点不属于任何象限,在x 轴的正方向上的点,坐标的符号是(+,0);负方向上的点的坐标符号是(—,0)。
同理, 在y 轴的正方向上的点,坐标的符号是(0,+);负方向上的点的坐标符号是(0,—)。


极坐标与直角坐标概述在数学中,极坐标和直角坐标是两种用于描述平面上点的坐标系统。
它们在不同的数学问题中具有不同的适用性。
本文将介绍极坐标和直角坐标的概念、转换关系以及它们在不同领域的应用。
极坐标极坐标系统是一种通过点的极径(距离原点的长度)和极角(与一个固定轴的夹角)来确定点在平面上位置的坐标系统。
一个点的极坐标用(r, θ)表示,其中r代表极径,θ代表极角。
极径r通常是一个非负数,而极角θ通常以弧度表示。
在极坐标系统中,原点的极坐标为(0, 0)。
正极轴为角度为0的射线,极角逆时针增加,极角为0到2π之间的点位于同一射线上。
极径为r的点位于以原点为中心,半径为r的圆上。
直角坐标直角坐标系统,也称为笛卡尔坐标系统,是通过点在两个互相垂直的轴上的投影来确定其在平面上的位置。
一个点的直角坐标用(x, y)表示,其中x代表点在x 轴上的投影,y代表点在y轴上的投影。
在直角坐标系统中,原点的坐标为(0, 0)。
x轴是垂直于y轴的水平线,y轴是垂直于x轴的竖直线。
直角坐标系将平面分为四个象限,第一象限的点的x坐标和y坐标都是正数,第二象限的x坐标为负数而y坐标为正数,以此类推。
极坐标与直角坐标的转换极坐标和直角坐标之间存在一种转换关系。
给定一个点的极坐标(r, θ),可以通过以下公式将其转换为直角坐标(x, y):x = r * cos(θ)y = r * sin(θ)而给定一个点的直角坐标(x, y),可以通过以下公式将其转换为极坐标(r, θ):r = sqrt(x^2 + y^2)θ = atan2(y, x)这些转换公式使得我们可以在极坐标和直角坐标之间自由切换,方便进行各种数学计算。
应用领域极坐标和直角坐标在不同的领域中具有广泛的应用。
在几何学中,极坐标系统常用于描述和分析曲线的形状,特别是极坐标方程可以简化特定类型的曲线方程。
在工程学和物理学中,极坐标系统常用于描述旋转和圆周运动。
例如,在机械工程领域,极坐标可以方便地描述旋转物体的位置和运动。
极坐标原理极坐标是一种描述平面上点位置的数学工具,它以点到原点的距离和点与某一固定线(通常是x轴)的夹角来确定点的位置。
极坐标系统在数学、物理学、工程学等领域都有广泛的应用,它为描述和分析复杂的曲线、图形和运动提供了便利的工具。
在本文中,我们将介绍极坐标的基本原理及其在实际应用中的重要性。
首先,让我们来了解一下极坐标的基本概念。
在极坐标系统中,每个点的坐标用一个有序对(r,θ)来表示,其中r表示点到原点的距离,θ表示点与固定线的夹角。
这种表示方法与直角坐标系(x,y)不同,它更适合描述圆形、弧线和旋转运动。
通过极坐标,我们可以更直观地理解和描述这些曲线和运动。
极坐标的转换公式是r = √(x^2 + y^2),θ = arctan(y/x),其中x和y分别表示点在直角坐标系中的坐标。
这些公式可以帮助我们将一个点的坐标从直角坐标系转换到极坐标系,或者反过来。
通过这些转换公式,我们可以在不同的坐标系中进行方便的计算和分析。
在物理学和工程学中,极坐标系统有着重要的应用。
例如,在描述物体的旋转运动时,极坐标可以更清晰地表达物体的角速度、角加速度和角位移。
此外,在分析电磁场、流体力学、声学等问题时,极坐标也可以简化问题的描述和求解过程,为工程设计和科学研究提供便利。
除此之外,极坐标还在数学分析和几何学中发挥着重要作用。
通过极坐标,我们可以更直观地理解和分析曲线的形状、对称性和变化规律。
极坐标系下的积分、微分等运算也有其独特的形式和应用。
因此,掌握极坐标的原理和运用方法对于理解数学和几何学的深层结构是非常重要的。
总之,极坐标原理是一种重要的数学工具,它在描述和分析曲线、图形和运动时有着独特的优势。
通过极坐标,我们可以更直观、更方便地理解和处理各种复杂的问题。
因此,对极坐标原理的深入理解和应用将对我们的学习和工作带来很大的帮助。
希望本文能够帮助读者更好地理解极坐标原理,并在实际应用中发挥其重要作用。
极坐标的基本公式极坐标是一种描述平面上点位置的坐标系统,它使用极径和极角来表示点的位置。
极径表示点到原点的距离,而极角表示点与正半轴的夹角。
在极坐标系统中,点的坐标可以用一个有序对(r, θ)来表示,其中r是极径,θ是极角。
极坐标的基本公式是通过将直角坐标系中的点的坐标转换为极坐标系中的坐标来得到的。
这个公式可以用来计算点在极坐标系中的坐标,也可以用来将极坐标系中的坐标转换为直角坐标系中的坐标。
要将直角坐标系中的点的坐标(x, y)转换为极坐标系中的坐标(r, θ),可以使用以下公式:r = √(x^2 + y^2)θ = arctan(y/x)其中,√表示平方根,arctan表示反正切函数。
这个公式可以通过计算点到原点的距离和点与正半轴的夹角来得到点在极坐标系中的坐标。
同样地,要将极坐标系中的坐标(r, θ)转换为直角坐标系中的坐标(x, y),可以使用以下公式:x = r * cos(θ)y = r * sin(θ)其中,cos表示余弦函数,sin表示正弦函数。
这个公式可以通过计算极径和极角对应的直角坐标来得到点在直角坐标系中的坐标。
极坐标的基本公式是极坐标系和直角坐标系之间的桥梁,它使我们能够在不同的坐标系中描述点的位置。
通过这个公式,我们可以方便地进行坐标的转换和计算。
总结一下,极坐标的基本公式包括将直角坐标系中的点的坐标转换为极坐标系中的坐标的公式,以及将极坐标系中的坐标转换为直角坐标系中的坐标的公式。
这些公式为我们在不同的坐标系中描述点的位置提供了便利,使我们能够更加灵活地进行计算和分析。
希望通过本文的介绍,读者能够对极坐标的基本公式有一个更加清晰的理解,并能够灵活运用这些公式进行问题的求解和分析。
极坐标的基本公式是数学中的重要工具,它在物理、工程、计算机图形学等领域都有广泛的应用。
通过深入学习和理解这些公式,我们可以更好地掌握相关领域的知识和技能,为实际问题的解决提供有力的支持。