点的极坐标与直角坐标的互化
- 格式:ppt
- 大小:325.50 KB
- 文档页数:13
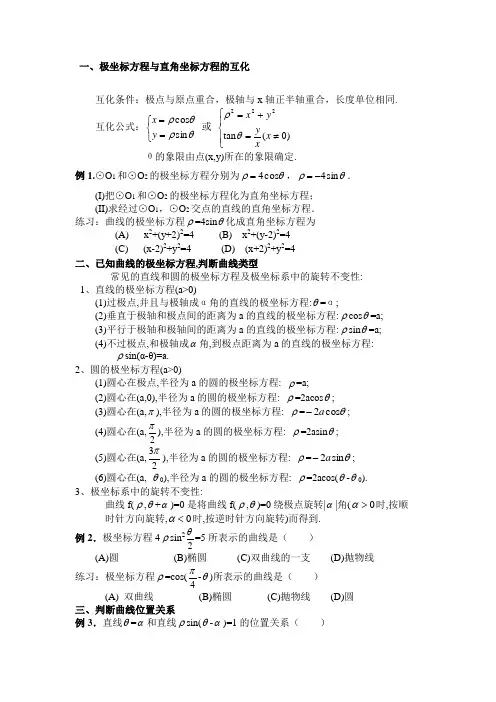
一、极坐标方程与直角坐标方程的互化互化条件:极点与原点重合,极轴与x 轴正半轴重合,长度单位相同.互化公式:⎩⎨⎧==θρθρsin cos y x 或 ⎪⎩⎪⎨⎧≠=+=)0(tan 222x x y y x θρ θ的象限由点(x,y)所在的象限确定.例1.⊙O 1和⊙O 2的极坐标方程分别为θρcos 4=,θρsin 4-=.(I)把⊙O 1和⊙O 2的极坐标方程化为直角坐标方程;(II)求经过⊙O 1,⊙O 2交点的直线的直角坐标方程.练习:曲线的极坐标方程ρ=4sin θ化成直角坐标方程为(A) x 2+(y+2)2=4 (B) x 2+(y-2)2=4(C) (x-2)2+y 2=4 (D) (x+2)2+y 2=4二、已知曲线的极坐标方程,判断曲线类型常见的直线和圆的极坐标方程及极坐标系中的旋转不变性:1、直线的极坐标方程(a>0)(1)过极点,并且与极轴成α角的直线的极坐标方程:θ=α;(2)垂直于极轴和极点间的距离为a 的直线的极坐标方程:ρcos θ=a;(3)平行于极轴和极轴间的距离为a 的直线的极坐标方程:ρsin θ=a;(4)不过极点,和极轴成α角,到极点距离为a 的直线的极坐标方程:ρsin(α-θ)=a.2、圆的极坐标方程(a>0)(1)圆心在极点,半径为a 的圆的极坐标方程: ρ=a;(2)圆心在(a,0),半径为a 的圆的极坐标方程: ρ=2acos θ;(3)圆心在(a,π),半径为a 的圆的极坐标方程: ρ=θcos 2a -;(4)圆心在(a,2π),半径为a 的圆的极坐标方程: ρ=2asin θ; (5)圆心在(a,23π),半径为a 的圆的极坐标方程: ρ=θsin 2a -; (6)圆心在(a, θ0),半径为a 的圆的极坐标方程: ρ=2acos(θ-θ0).3、极坐标系中的旋转不变性:曲线f(ρ,θ+α)=0是将曲线f(ρ,θ)=0绕极点旋转|α|角(0>α时,按顺时针方向旋转,0<α时,按逆时针方向旋转)而得到.例2.极坐标方程4ρsin 22θ=5所表示的曲线是( ) (A)圆 (B)椭圆 (C)双曲线的一支 (D)抛物线练习:极坐标方程ρ=cos(4π-θ)所表示的曲线是( ) (A) 双曲线 (B)椭圆 (C)抛物线 (D)圆三、判断曲线位置关系例3.直线θ=α和直线ρsin(θ-α)=1的位置关系( )(A) 垂直 (B) 平行 (C) 相交但不垂直 (D) 重合四、根据条件求直线和圆的极坐标方程例4.在极坐标系中,如果一个圆的方程是ρ=4cos θ+6sin θ,那么过圆心且与极轴平行的直线方程是( )(A) ρsin θ=3 (B) ρsin θ = –3 (C) ρcos θ =2 (D) ρcos θ = –2练习:在极坐标方程中,与圆ρ=4sin θ相切的一条直线的方程是(A) ρsin θ=2 (B)ρcos θ=2 (C)ρcos θ= 4 (D) ρcos θ=- 4(答案:B)五、求曲线中点的极坐标例5.在极坐标系中,定点A(1,2π),点B 在直线0sin cos =+θρθρ上运动,当线段AB 最短时,点B 的极坐标是_________.练习:极坐标方程5ρ2cos2θ+ρ2-24=0所表示的曲线焦点的极坐标为_________.六、求距离例6.在极坐标系中,直线 的方程为ρsin θ=3,则点(2,6π)到直线 的距离为__________.练习:极坐标方程分别是ρ=cos θ和ρ=sin θ的两个圆的圆心距是 (A) 2 (B) 2 (C) 1 (D)22七、判定曲线的对称性例7.在极坐标系中,曲线ρ= 4sin(θ-3π)关于 (A) 直线θ=3π轴对称 (B)直线θ=65π轴对称 (C) 点(2, 3π)中心对称 (D)极点中心对称八、求三角形面积例8.在极坐标系中,O 是极点,设点A(4,3π),B(5,65π-),则△OAB 的面积是 .欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习资料等等打造全网一站式需求。
极坐标与直角坐标的互化推导公式在数学中,极坐标和直角坐标是两种不同的坐标系,它们可以互相转换并描述同一点的位置。
下面将通过推导公式,介绍极坐标与直角坐标之间的转换关系。
极坐标与直角坐标的基本概念首先,我们先来了解一下极坐标和直角坐标的基本概念。
•极坐标:极坐标使用极径和极角来表示平面上的点的位置。
其中,极径表示点到原点的距离,极角表示点与正半轴之间的角度。
•直角坐标:直角坐标使用横坐标和纵坐标来表示平面上的点的位置。
其中,横坐标表示点在 x 轴上的投影,纵坐标表示点在 y 轴上的投影。
极坐标转直角坐标接下来,我们将推导出将极坐标转换为直角坐标的公式。
设点 P 在极坐标系中的坐标为(r, θ),在直角坐标系中的坐标为 (x, y)。
利用三角函数的关系可得:$$x = r \\cos(\\theta)$$$$y = r \\sin(\\theta)$$这两个公式将极坐标系中的点的坐标转换为直角坐标系中的坐标。
直角坐标转极坐标同样地,我们也可以推导出将直角坐标转换为极坐标的公式。
设点 P 在直角坐标系中的坐标为 (x, y),在极坐标系中的坐标为(r, θ)。
利用三角函数的反函数可得:$$r = \\sqrt{x^2 + y^2}$$$$\\theta = \\arctan\\left(\\frac{y}{x}\\right)$$这两个公式将直角坐标系中的点的坐标转换为极坐标系中的坐标。
推导过程下面,我们将推导出上述的转换公式。
极坐标转直角坐标首先,考虑直角三角形 OPX,如下图所示:|| O|-----------|-----r | x||P根据三角函数的定义,我们可以得到:$$\\cos(\\theta) = \\frac{x}{r}$$$$\\sin(\\theta) = \\frac{y}{r}$$将上面两个等式进行整理,可以得到:$$x = r \\cos(\\theta)$$$$y = r \\sin(\\theta)$$这就是将极坐标转换为直角坐标的公式。
极坐标方程与直角坐标方程的互化一、引言极坐标和直角坐标是两种常用的描述平面上点位置的方式。
在数学和物理学中,这两种坐标系都有广泛的应用。
本文将介绍极坐标方程与直角坐标方程之间的互化关系。
二、极坐标系和直角坐标系的定义1. 极坐标系极坐标是一种描述平面上点位置的方式,它使用极径和极角来表示点在平面上的位置。
其中,极径表示点到原点的距离,而极角表示该点与正半轴之间的夹角。
通常用符号(r,θ)表示一个点在极坐标系中的位置。
2. 直角坐标系直角坐标系是一种描述平面上点位置的方式,它使用x轴和y轴上的数值来表示点在平面上的位置。
通常用符号(x,y)表示一个点在直角坐标系中的位置。
三、从直角坐标系到极坐标系1. 由(x,y)求(r,θ)要将一个点从直角坐标系转换为极坐标系,需要求出该点到原点的距离r和该点与正半轴之间的夹角θ。
其中,r可以通过勾股定理求得:r = √(x² + y²)而θ可以通过反三角函数求得:θ = arctan(y/x) (当x>0时)θ = arctan(y/x) + π (当x<0,y≥0时)θ = arctan(y/x) - π (当x<0,y<0时)θ = π/2 (当x=0,y>0时)θ = -π/2 (当x=0,y<0时)θ = 未定义 (当x=0,y=0时)2. 由(r,θ)求(x,y)要将一个点从极坐标系转换为直角坐标系,需要求出该点在x轴和y 轴上的坐标值。
其中,x可以通过余弦函数求得:x = r cos(θ)而y可以通过正弦函数求得:y = r sin(θ)四、从极坐标系到直角坐标系1. 由(r,θ)求(x,y)同样地,要将一个点从极坐标系转换为直角坐标系,也需要求出该点在x轴和y轴上的坐标值。
其中,x可以通过余弦函数求得:x = r cos(θ)而y可以通过正弦函数求得:y = r sin(θ)2. 由(x,y)求(r,θ)同样地,要将一个点从直角坐标系转换为极坐标系,也需要求出该点到原点的距离r和该点与正半轴之间的夹角θ。
极坐标和直角坐标的互化公式
极坐标和直角坐标是两种不同的坐标系统,它们各自有自己的特点和优劣。
在不同的问题中,我们需要使用不同的坐标系统来描述和解决问题。
但是,有时候我们需要将一个点的极坐标和直角坐标相互转换。
这就需要用到极坐标和直角坐标的互化公式。
首先,我们来看如何将一个点的极坐标转换为直角坐标。
一个点在极坐标系中由极径和极角两个量来确定,分别用 r 和θ表示。
然而,我们在直角坐标系中描述一个点时需要用 x 和 y 坐标值。
为了将一个点的极坐标转换为直角坐标,我们可以使用以下公式:
x = r * cosθ
y = r * sinθ
其中,cosθ和 sinθ分别表示极角θ的余弦和正弦值。
这些值可以通过查表或使用计算器来求得。
接下来,我们来看如何将一个点的直角坐标转换为极坐标。
一个点在直角坐标系中由 x 和 y 坐标值来确定,我们需要找到它们对应的极径和极角。
为了将一个点的直角坐标转换为极坐标,我们可以使用以下公式:
r = sqrt(x^2 + y^2)
θ = atan(y/x)
其中,sqrt 表示平方根,atan 表示反正切函数。
注意,当 x=0 时,θ的值为π/2 或 -π/2,取决于 y 的正负。
此时,我们需要特别处理。
一、极坐标方程与直角坐标方程的互化互化条件:极点与原点重合,极轴与x 轴正半轴重合,长度单位相同.互化公式:⎩⎨⎧==θρθρsin cos y x 或 ⎪⎩⎪⎨⎧≠=+=)0(tan 222x x y y x θρ θ的象限由点(x,y)所在的象限确定.例1.⊙O 1和⊙O 2的极坐标方程分别为θρcos 4=,θρsin 4-=.(I)把⊙O 1和⊙O 2的极坐标方程化为直角坐标方程;(II)求经过⊙O 1,⊙O 2交点的直线的直角坐标方程.练习:曲线的极坐标方程ρ=4sin θ化成直角坐标方程为(A) x 2+(y+2)2=4 (B) x 2+(y-2)2=4(C) (x-2)2+y 2=4 (D) (x+2)2+y 2=4二、已知曲线的极坐标方程,判断曲线类型常见的直线和圆的极坐标方程及极坐标系中的旋转不变性:1、直线的极坐标方程(a>0)(1)过极点,并且与极轴成α角的直线的极坐标方程:θ=α;(2)垂直于极轴和极点间的距离为a 的直线的极坐标方程:ρcos θ=a;(3)平行于极轴和极轴间的距离为a 的直线的极坐标方程:ρsin θ=a;(4)不过极点,和极轴成α角,到极点距离为a 的直线的极坐标方程: ρsin(α-θ)=a.2、圆的极坐标方程(a>0)(1)圆心在极点,半径为a 的圆的极坐标方程: ρ=a;(2)圆心在(a,0),半径为a 的圆的极坐标方程: ρ=2acos θ;(3)圆心在(a,π),半径为a 的圆的极坐标方程: ρ=θcos 2a -;(4)圆心在(a,2π),半径为a 的圆的极坐标方程: ρ=2asin θ; (5)圆心在(a,23π),半径为a 的圆的极坐标方程: ρ=θsin 2a -; (6)圆心在(a, θ0),半径为a 的圆的极坐标方程: ρ=2acos(θ-θ0).3、极坐标系中的旋转不变性:曲线f(ρ,θ+α)=0是将曲线f(ρ,θ)=0绕极点旋转|α|角(0>α时,按顺 时针方向旋转,0<α时,按逆时针方向旋转)而得到.例2.极坐标方程4ρsin 22θ=5所表示的曲线是( ) (A)圆 (B)椭圆 (C)双曲线的一支 (D)抛物线练习:极坐标方程ρ=cos(4π-θ)所表示的曲线是( ) (A) 双曲线 (B)椭圆 (C)抛物线 (D)圆三、判断曲线位置关系例3.直线θ=α和直线ρsin(θ-α)=1的位置关系( )(A) 垂直 (B) 平行 (C) 相交但不垂直 (D) 重合四、根据条件求直线和圆的极坐标方程例4.在极坐标系中,如果一个圆的方程是?=4cos ?+6sin ?,那么过圆心且与极轴平行的直线方程是( )(A) ?sin ?=3 (B) ?sin ? = –3 (C) ?cos ? =2 (D) ?cos ? = –2练习:在极坐标方程中,与圆ρ=4sin θ相切的一条直线的方程是(A) ρsin θ=2 (B)ρcos θ=2 (C)ρcos θ= 4 (D) ρcos θ=- 4(答案:B)五、求曲线中点的极坐标例5.在极坐标系中,定点A(1,2π),点B 在直线0sin cos =+θρθρ上运动,当线段AB 最短时,点B 的极坐标是_________.练习:极坐标方程5ρ2cos2θ+ρ2-24=0所表示的曲线焦点的极坐标为_________.六、求距离例6.在极坐标系中,直线λ的方程为ρsin θ=3,则点(2,6π)到直线λ的距离为__________.练习:极坐标方程分别是ρ=cos θ和ρ=sin θ的两个圆的圆心距是(A) 2 (B)2 (C) 1 (D) 22 七、判定曲线的对称性例7.在极坐标系中,曲线ρ= 4sin(θ-3π)关于 (A) 直线θ=3π轴对称 (B)直线θ=65π轴对称 (C) 点(2,3π)中心对称 (D)极点中心对称 八、求三角形面积例8.在极坐标系中,O 是极点,设点A(4,3π),B(5,65π-),则△OAB 的面积是 .。
点的极坐标与直角坐标的互化
点的极坐标与直角坐标的互化
点的极坐标与直角坐标的互化,是将极坐标和直角坐标进行转换的一种运算方式。
两者的转换有以下两种情形:
1. 极坐标到直角坐标的转换
给定某点的极坐标(r,θ),其直角坐标依据以下公式计算:
x=r·cosθ
y=r·sinθ
2. 直角坐标到极坐标的转换
给定某点的直角坐标(x,y),其直角坐标依据以下公式计算:
r=√(x^2+y^2)
θ=tan^-1(y/x)
上述就是极坐标与直角坐标的互化的简单介绍,因为极坐标和直角坐标之间的转换是日常用到的,如果一个点的坐标出现任何一种情况,可以根据上述的公式将其转换为另一种类型的坐标。
- 1 -。


极坐标和直角坐标转换公式在数学和物理学中,坐标系是研究和描述几何空间中点的位置的基本工具之一。
常用的坐标系包括直角坐标系和极坐标系。
直角坐标系使用直角坐标来表示点的位置,如 (x, y)。
而极坐标系使用极径和极角来表示点的位置,如(r, θ)。
在进行数学计算或几何分析时,我们经常需要将点在这两种坐标系之间进行转换。
本文将介绍极坐标和直角坐标的转换公式。
直角坐标转换为极坐标假设有一个点 P 在直角坐标系中,其坐标为 (x, y)。
现在我们要将其转换为极坐标系中的坐标(r, θ)。
这个转换过程可以通过以下两个公式实现:1.极径 r 的计算公式为:r= \sqrt{x2+y2}r= \sqrt{x2+y2}这个公式表示点 P 到原点的距离。
2.极角θ 的计算公式为:θ = \arctan\left(\frac{y}{x}\right)θ = \arctan\left(\frac{y}{x}\right)这个公式表示点 P 与 x 轴的夹角。
按照上述公式,我们可以将直角坐标系中的点转换为极坐标系中的坐标。
极坐标转换为直角坐标现在假设有一个点 Q 在极坐标系中,其坐标为(r, θ)。
我们要将其转换为直角坐标系中的坐标 (x, y)。
这个转换过程可以通过以下两个公式实现:1.x 坐标的计算公式为:x = r \cdot \cos(\theta)x = r \cdot \cos(\theta)这个公式表示点 Q 在 x 轴上的投影。
2.y 坐标的计算公式为:y = r \cdot \sin(\theta)y = r \cdot \sin(\theta)这个公式表示点 Q 在 y 轴上的投影。
根据上述公式,我们可以将极坐标系中的点转换为直角坐标系中的坐标。
补充说明需要注意的是,在进行坐标转换时,我们需要考虑到各个象限的特殊情况。
例如,在进行极坐标转换为直角坐标时,如果 x 轴上的点 P 位于第二或第三象限,则计算公式中的极角θ 需要加上或减去π(pi)来获得正确的结果。
极坐标和直角坐标系的互化公式1. 引言在数学中,坐标系是一种描述点的位置的系统。
常见的坐标系有直角坐标系和极坐标系。
直角坐标系使用平面上的两个垂直轴表示点的位置,而极坐标系使用极径和极角来表示点的位置。
本文将介绍极坐标和直角坐标系之间的互化公式。
2. 极坐标系和直角坐标系简介2.1 极坐标系极坐标系是一种使用极径和极角来表示点的位置的坐标系。
极径(r)表示点到极点(如原点)的距离,而极角(θ)表示点与特定轴(如x轴)之间的夹角。
通常,极径为非负数,极角可以使用度数或弧度进行表示。
2.2 直角坐标系直角坐标系是一种使用平面上的两个垂直轴来表示点的位置的坐标系。
通常,水平轴表示为x轴,垂直轴表示为y轴。
一个点在直角坐标系下的位置由该点与x轴和y轴之间的水平和垂直距离确定。
3. 极坐标系转换为直角坐标系极坐标系可以通过以下公式转换为直角坐标系:•x = r * cos(θ)•y = r * sin(θ)其中,x和y分别是点在直角坐标系下的坐标,r是极径,θ是极角。
4. 直角坐标系转换为极坐标系直角坐标系可以通过以下公式转换为极坐标系:•r = sqrt(x^2 + y^2)•θ = atan2(y, x)其中,r是点到原点的距离,θ是点与x轴之间的夹角,atan2(y, x)是一个函数,表示点(x, y)与x轴正向的夹角。
需要注意的是,atan2函数可以得到完整的360度范围内的夹角。
5. 示例5.1 极坐标转换为直角坐标假设我们有一个点P,其极坐标为(r = 2, θ = π/4)。
我们可以使用公式:•x = 2 * cos(π/4) = √2•y = 2 * sin(π/4) = √2因此,点P在直角坐标系下的坐标为(x = √2, y = √2)。
5.2 直角坐标转换为极坐标假设我们有一个点Q,其直角坐标为(x = -3, y = 3)。
我们可以使用公式:•r = sqrt((-3)^2 + 3^2) = sqrt(18) = 3√2•θ = atan2(3, -3)根据实际计算结果,我们可以得到θ的值为π/4 + π = 5π/4。
二重积分极坐标与直角坐标的互化
二重积分是对二维平面上的一个区域上的函数进行积分。
常用的坐标系有直角坐标系和极坐标系。
直角坐标系中,一个点的坐标由 x 和 y 坐标表示。
极坐标系中,一个点的坐标由 r 和θ 表示,其中 r 表示点到原点的距离,θ
表示点与正 x 轴之间的夹角。
在进行二重积分时,可以根据问题的特点选择使用直角坐标系或极坐标系。
而在直角坐标系和极坐标系之间进行互化,可以通过以下的转换关系实现:
由直角坐标系转换到极坐标系:
r = √(x^2 + y^2)
θ = arctan(y/x)
由极坐标系转换到直角坐标系:
x = r * cos(θ)
y = r * sin(θ)
在进行积分时,需要注意变量的变换,以及面积元素的变换。
在直角坐标系中,面积元素为 dA = dx * dy;在极坐标系中,
面积元素为dA = r * dr * dθ。
通过这些转换关系,可以将原本在直角坐标系下的积分问题转换到极坐标系下进行计算,或者将原本在极坐标系下的积分问题转换到直角坐标系下进行计算,以便于求解。
极坐标方程与直角坐标方程的互化例题讲解引言在数学中,极坐标和直角坐标是两种常见的表示点的方式。
极坐标系使用角度和距离来描述一个点的位置,而直角坐标系使用水平和垂直坐标来表示。
极坐标方程和直角坐标方程是用来描述曲线或图形的等式。
本文将通过一些例题来讲解极坐标方程和直角坐标方程之间的互化关系。
例题一:互化问题假设有一个极坐标方程为$r = 2\\cos\\theta$,我们要将其转换为直角坐标方程。
首先我们需要了解极坐标和直角坐标之间的关系公式:$x = r\\cos\\theta$,$y = r\\sin\\theta$。
现在我们可以开始进行转换。
步骤一:将r替换为x和y将r用x和y表示,得到$x = 2\\cos\\theta \\cdot \\cos\\theta = 2\\cos^2\\theta$$y = 2\\cos\\theta \\cdot \\sin\\theta = \\sin2\\theta$步骤二:将$\\theta$替换为它的表达式考虑到$\\cos^2\\theta = \\frac{1 + \\cos2\\theta}{2}$,将其代入x的表达式中,得到$x = 2\\cdot\\frac{1 + \\cos2\\theta}{2}=\\cos2\\theta+1$将$\\sin2\\theta$用x和y表示,得到$y = \\sin2\\theta = 2\\sin\\theta\\cos\\theta = 2x\\sqrt{1-x^2}$步骤三:整理结果最后,将x和y的结果整理一下,$x = \\cos2\\theta + 1$$y = 2x\\sqrt{1-x^2}$这样,我们成功地将极坐标方程转换为了直角坐标方程。
例题二:互化问题现在我们来看一个反向的例题,给定一个直角坐标方程x=2,我们要将其转换为极坐标方程。
步骤一:将x和y替换为r和$\\theta$将x=2代入$x = r\\cos\\theta$中,得到$r\\cos\\theta = 2$。
直角坐标与极坐标的互化公式直角坐标与极坐标是数学中常用的两种坐标系。
两者相互转换的公式被称为互化公式。
在本文中,我将详细介绍直角坐标与极坐标的互化公式及其应用。
一、直角坐标系直角坐标系是我们常见的坐标系,也被称为笛卡尔坐标系。
在直角坐标系中,我们使用两个垂直的坐标轴x和y来表示平面上的点。
点的位置可以通过它在x轴和y轴上的坐标来确定。
二、极坐标系极坐标系则是利用点到原点的距离和点与正x轴的夹角来表示点的位置。
在极坐标系中,我们用r表示点到原点的距离,用θ表示点与正x轴的夹角。
极坐标系适用于描述圆形、旋转等问题。
三、直角坐标转换为极坐标要将直角坐标转换为极坐标,我们需要使用以下公式:r = √(x^2 + y^2)θ = arctan(y/x)其中,r为点到原点的距离,x和y分别为点在x轴和y轴上的坐标。
arctan为反正切函数,用于计算夹角θ。
四、极坐标转换为直角坐标要将极坐标转换为直角坐标,我们需要使用以下公式:x = r * cos(θ)y = r * sin(θ)其中,x和y分别为点在x轴和y轴上的坐标,r为点到原点的距离,θ为点与正x轴的夹角。
cos和sin分别为余弦和正弦函数。
五、互化公式的应用直角坐标与极坐标之间的互化公式在很多数学和物理问题中都有广泛的应用。
例如,在天文学中,我们可以使用极坐标系来描述天体的位置和运动;在工程学中,我们可以使用直角坐标系来描述物体在空间中的位置和方向。
互化公式也可以帮助我们更方便地计算一些复杂的问题。
例如,当我们需要计算一个复杂图形的面积时,可以将其分割成多个简单的部分,然后分别计算每个部分的面积,并将它们相加。
在直角坐标系中,这个过程可能会非常复杂。
但是如果我们将图形转换为极坐标系,那么计算每个部分的面积就会变得简单很多,因为在极坐标系中,面积的计算公式更加简洁。
六、总结直角坐标与极坐标是常见的坐标系,它们之间的互化公式可以帮助我们方便地进行坐标转换。
极坐标和直角坐标的相互转化1. 引言在数学中,坐标系是描述几何图形中点的位置的一种方式。
常见的坐标系包括直角坐标系和极坐标系。
直角坐标系使用直角坐标来表示点的位置,而极坐标系使用极径和极角来表示点的位置。
本文将介绍极坐标和直角坐标之间的相互转化关系。
2. 直角坐标系直角坐标系是最常见的坐标系之一。
在直角坐标系中,平面被划分为四个象限,每个象限有一个正负号来表示坐标的正负方向。
一个点在直角坐标系中的位置由其横坐标(x)和纵坐标(y)决定。
3. 极坐标系极坐标系是另一种常见的坐标系。
在极坐标系中,一个点的位置由其极径(r)和极角(θ)决定。
极径表示点到原点的距离,极角表示点与正x轴的夹角。
4. 极坐标转直角坐标要将极坐标转换为直角坐标,可以使用以下公式:x = r * cos(θ)y = r * sin(θ)其中,x和y分别表示点在直角坐标系中的横坐标和纵坐标,r和θ分别表示点在极坐标系中的极径和极角。
例如,假设有一个点的极坐标为(r, θ),要将其转换为直角坐标,可以使用上述公式计算得到该点在直角坐标系中的坐标(x, y)。
5. 直角坐标转极坐标要将直角坐标转换为极坐标,可以使用以下公式:r = sqrt(x^2 + y^2)θ = arctan(y / x)其中,r和θ分别表示点在极坐标系中的极径和极角,x和y分别表示点在直角坐标系中的横坐标和纵坐标。
需要注意的是,由于arctan函数的定义域为(-π/2, π/2),因此计算得到的极角θ可能不包含点所在的象限信息。
为了得到完整的极角,需要根据点所在象限进行修正。
例如,假设有一个点的直角坐标为(x, y),要将其转换为极坐标,可以使用上述公式计算得到该点在极坐标系中的坐标(r, θ)。
6. 示例6.1 极坐标转直角坐标示例假设有一个点的极坐标为(r = 3, θ = π/4),要将其转换为直角坐标。
根据公式:x = r * cos(θ) = 3 * cos(π/4) ≈ 2.12y = r * sin(θ) = 3 * sin(π/4) ≈ 2.12因此,该点在直角坐标系中的坐标为(x ≈ 2.12, y ≈ 2.12)。