接触网腕臂偏移计算、a值取值
- 格式:xls
- 大小:75.00 KB
- 文档页数:2
五、计算题1.在半补偿简单链形悬挂区段,采用GJ-70+TCG-l00,最高气温为+40°C,最低气温为-20°C,吊弦离中心锚结900m,αj=1.7*10-5/°C,计算温度为40°C时吊弦偏移值。
(5分)解:由tp =(tmax+tmin)/2, (2分)得tp= 10°C ,由E=Lαj(tx-tp),(2分)得E=459mm。
答:(向下锚偏)(1分)2.在半补偿弹性链形悬挂区段,采用GJ-70+TCG-85,+40°C,最低气温为-20°C,吊弦离中心锚结600m,αj=1.7*10-5/°C,计算温度为30°C时吊弦偏移值。
[333010201] (5分)解:由tp =(tmax+tmin)/2, (2分)得tp= 10°C ,由E=Lαj(tx-tp),(2分)得E=204mm。
答:(向下锚偏)(1分)3.在半补偿简单链形悬挂区段,采用GJ-70+GLCB85/173,+40°C,最低气温为-20°C,某悬挂点离中心锚结500m,αj=1.7*10-5/°C,计算温度为-10°C腕臂相对于支柱中心的偏移值。
(5分)解:由tp =(tmax+tmin)/2, (2分)得tp= 10°C ,由E=Lαj(tx-tp),(2分)得E=-170mm。
答:(向中锚偏)(1分)4.在半补偿简单链形悬挂区段,采用GJ-70+TCG-l00,最高气温为+40°C,最低气温为-20°C,某悬挂点离中心锚结800m,αj=1.7*10-5/°C,计算温度为40°C 时定位器相对于支柱中心的偏移值。
(5分)解:由tp =(tmax+tmin)/2, (2分)得tp= 10°C ,由E=Lαj(tx-tp),(2分)得E=408mm。
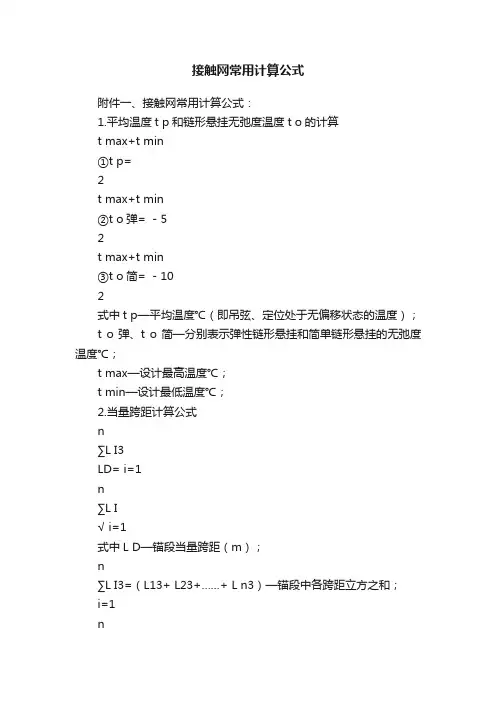
接触网常用计算公式附件一、接触网常用计算公式:1.平均温度t p和链形悬挂无弛度温度t o的计算t max+t min①t p=2t max+t min②t o弹= -52t max+t min③t o简= -102式中t p—平均温度℃(即吊弦、定位处于无偏移状态的温度);t o弹、t o简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max—设计最高温度℃;t min—设计最低温度℃;2.当量跨距计算公式n∑L I3LD= i=1n∑L I√ i=1式中L D—锚段当量跨距(m);n∑L I3=(L13+ L23+……+ L n3)—锚段中各跨距立方之和;i=1n∑L I=(L1+ L2+……+ L n)—锚段中各跨距之和;i=13.定位肩架高度B的计算公式B≈H+e+I(h/d+1/10)h/2式中B—肩架高度(mm);H—定位点处接触线高度(mm);e—支持器有效高度(mm);I—定位器有效长度(包括绝缘子)(mm);d—定位点处轨距(mm);h—定位点外轨超高(mm);4.1 接触线拉出值a地的计算公式Ha地=a- hd式中a地—拉出值标准时,导线垂直投影与线路中心线的距离(mm)。
a地为正时导线的垂直投影应在线路的超高侧,a地为负时导线的垂直投影应在线路的低轨侧。
H—定位点接触线的高度(mm);a—导线设计拉出值(mm);h—外轨超高(mm);d—轨距(mm);4.2 接触线拉出值a的计算公式a=m+c式中a—接触线拉出值(mm);m—定位点处接触线与线路中心的水平距离(mm);C—定位点处受电弓与线路中心的水平距离(mm),由C=h*H/L确定(h为外轨超高;H为接触线高度;L为轨距)。
5.接触线定位拉出值变化量Δa max的计算公式Δa max=I z-√I2z-E2max式中Δa max—定位点拉出值的最大变化量(mm);I z—定位装置(受温度影响)偏转的有效长度(mm);E max—极限温度时定位器的最大偏移值(mm);由上式可知E=0时Δa=06.定位器无偏移时拉出值a15的确定:(取平均温度t p=15℃)a15=a±1/2Δa max式中 a—导线设计拉出值(mm);Δa max—定位点拉出值的最大变化量(mm);a15—定位器无偏移时(即平均温度时)的拉出值(mm)。
接触网工中级题库含答案一、单选题(共80题,每题1分,共80分)1.吊柱不得扭曲,宜向受力反方向倾斜不大于()。
A、4°B、6°C、2°D、1°正确答案:C2.高铁供电设备接触线平直度:检查接触线与检测尺之间的()符合要求,不得大于0.1mm/m。
A、弯度B、长度C、间隙D、角度正确答案:C3.软横跨接地侧绝缘子泄漏距离不小于()。
A、1600mmB、1050mmC、1450mmD、960mm正确答案:A4.供电段承接试运行任务后应()组织实施。
A、审核后B、实验后C、及时D、校验后正确答案:C5.瓷制棒式绝缘子(抗弯)的机械强度安全系数不应小于()。
A、3.0B、4.0C、2.0D、2.5正确答案:D6.更换火花间隙等开路作业时,应使用短接线先行短接,设置短接线时不得影响()。
A、作业B、轨道电路C、回流回路D、信号回路正确答案:B7.高速铁路支柱整正过程,不允许利用()为支撑点使用整正器。
A、信号机B、应答器C、枕木D、钢轨正确答案:D8.限界值一般根据()或运行实践确定。
A、计算B、目标C、经验D、设计正确答案:A9.极限条件下,避雷器高压侧引线对接地体之间的距离大于()。
A、330mmB、400mmC、300mmD、350mm正确答案:D10.高速接触网结构高度一般为()。
A、1.4~1.7B、1.3~1.6C、1.1~1.4D、1.1~1.7正确答案:B11.软横跨各杵头杆螺纹外露长度应为()mm。
A、20B、20~80C、30D、50正确答案:B12.接触网动态检测中是通过()来测量受电弓弓头振动的垂直加速度,修正滑板的惯性力。
A、硬点B、冲击C、接触压力D、离线正确答案:A13.电流单位的标准表示符号是()。
A、AB、mAC、μmD、kA正确答案:A14.对于定位斜拉线的计算可以通过()计算。
A、直角三角形B、相似三角形C、平行四边形D、勾股定理正确答案:B15.()补偿装置,在时速200—250Km/h客运线上广泛采用。
接触网大修更换承力索时解决平腕臂(斜腕臂)偏移问题及值控制摘要:从接触网大修工程中更换承力索施工当中,总结出影响承力索倒接后b值控制以及平腕臂(斜腕臂)发生偏移的因素,并找到了解决办法。
对类似大修换线施工和新建电气化铁路线承力索架设提供了思路和方法。
关键词:接触网;b值;平腕臂(斜腕臂)偏移;施工1.引言在接触网大修工程中承力索倒接后平腕臂(斜腕臂)发生偏移以及承力索坠砣值不能达到标准是长期以来亟待解决的问题。
通常在进行承力索倒接时,一般是在倒新承力索时,平腕臂(斜腕臂)向中锚方向偏一些,坠砣在承力索倒接放线前提升1.5m~2m的高度。
此种方法没有对承力索倒接过程中承力索的线胀系数、线索弹性延伸、线索蠕动等一些变化量的产生进行定性分析和定量计算,其结果直接导致承力索倒接后,腕臂和定位偏移过大,从而使接触网几何参数发生变化,在参数超出极限值后将导致机车受电弓刮弓、钻弓等事故,严重情况下将影响整个锚段接触网设备的运行状况,这时需调整平腕臂(斜腕臂)和坠砣b值,大大影响了有限天窗时间。
要解决这一问题,首先应明确承力索在倒接过程中影响平腕臂(斜腕臂)偏移和影响b值的因素,以及在倒替后的环境变化对承力索的影响等。
2.影响值的几个因素2.1新线延伸量对值的影响《铁路电力牵引供电施工规范》(TB10208—98)5.9.8条规定,未经超拉的新铜承力索延伸率为4×10-4~7×10-4(取5×10-4),则承力索延伸量:(1)反映到值变化为:(2)其中,为滑轮传动比。
2.2曲线区段线长度变化量在曲线区段,由于曲线力的作用,新旧承力索会产生一段水平距离,在倒承力索后会对值产生一定影响。
如图1。
图1 曲线段线索长度变化示意图其中,为曲线半径;为新承力索倒接后的状态;为新承力索倒接前的状态。
为倒接前后的水平距离。
由图得:则新承力索在倒承力索后的长度变化量其中,(3)则(4)通过补偿反映到值变化即:(5)其中值的产生是由于线索所受曲线力而形成,可作如下近似计算。
技能认证接触网专业考试(习题卷3)说明:答案和解析在试卷最后第1部分:单项选择题,共34题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]所有接触网设备,至( )受电开始即认定为带电设备,之后接触网上的一切作业均必须按本规程的各项规定严格执行。
A)第一次B)第二次C)第三次D)第四次2.[单选题]作业平台车上有人作业时,检修作业车的移动速度不得超过( )km/h。
A)5km/hB)10km/hC)15km/hD)20km/h3.[单选题]新建电气化铁路在牵引供电设备送电前 ( ) 天,建设单位应将送电日期通告铁路沿线路内外各有关单位。
A)7B)10C)15D)304.[单选题]200km/h及以上区段一般不进行步行巡视。
每月应利用检修作业车进行一次巡视,运行速度不高于( )。
A)20km/hB)40km/hC)160km/hD)200km/h5.[单选题]下列不属于垂直天窗内组织的项目。
()A)上、下行渡线分段绝缘器检修B)上、下行渡线分割绝缘子检修C)上、下行横向分割绝缘子串检修D)隔离开关检修6.[单选题]道口安全揭示牌设于限界门汽车前进方向( )的立柱上。
A)左侧B)右侧C)上部D)中部7.[单选题]交叉渡线道岔处的线岔,在交叉渡线处两线路中心的交叉点处,两支悬挂的汇流排中心线分别距交叉点()mm,允许误差±20mm。
A)200B)130C)250D)1008.[单选题]设备寿命周期规定,避雷器为()年。
A)5-10B)10-12C)5-8D)8-129.[单选题]软横跨承受( )接触悬挂时采用双横承力索A)5组及以上B)6组及以上C)7组及以上D)8组及以上10.[单选题]中心锚结布置原则之一是:在曲线区段,一般设在靠( )的一侧。
A)曲线多、半径小B)曲线多、半径大C)曲线少、半径小D)曲线少、半径大11.[单选题]开口销掰开角度不应小于_______。
A)45°B)60°C)75°D)90°12.[单选题]从安全角度考虑,设备停电必须有一个明显的( )。
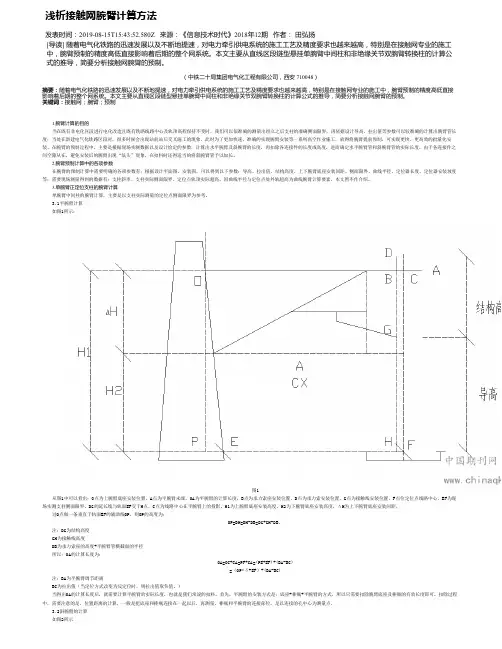
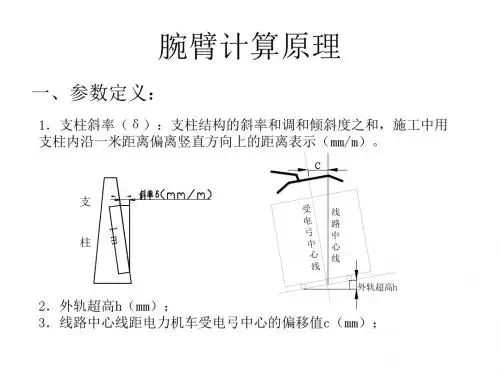
浅析接触网腕臂计算方法发表时间:2019-08-15T15:43:52.580Z 来源:《信息技术时代》2018年12期作者:田弘扬[导读] 随着电气化铁路的迅速发展以及不断地提速,对电力牵引供电系统的施工工艺及精度要求也越来越高,特别是在接触网专业的施工中,腕臂预制的精度高低直接影响着后期的整个网系统。
本文主要从直线区段链型悬挂单腕臂中间柱和非绝缘关节双腕臂转换柱的计算公式的推导,简要分析接触网腕臂的预制。
(中铁二十局集团电气化工程有限公司,西安 710048)摘要:随着电气化铁路的迅速发展以及不断地提速,对电力牵引供电系统的施工工艺及精度要求也越来越高,特别是在接触网专业的施工中,腕臂预制的精度高低直接影响着后期的整个网系统。
本文主要从直线区段链型悬挂单腕臂中间柱和非绝缘关节双腕臂转换柱的计算公式的推导,简要分析接触网腕臂的预制。
关键词:接触网;腕臂;预制1.腕臂计算的目的当在既有非电化区段进行电化改造且既有铁路线路中心及轨顶高程保持不变时,我们可以很准确的测量出组立之后支柱的准确侧面限界,再依据设计导高、拉出值等参数可以较准确的计算出腕臂管长度;当处在新建电气化铁路区段时,很多时候会出现站前站后交叉施工的现象,此时为了更加快速、准确的实现腕臂安装等一系列高空作业施工,就得将腕臂提前预制,可实现更快、更高效的批量化安装。
在腕臂的预制过程中,主要是根据现场实测数据以及设计给定的参数,计算出水平腕臂及斜腕臂的长度,再扣除各连接件的长度或高度,进而确定水平腕臂管和斜腕臂管的实际长度。
由于各连接件之间空隙从在,避免安装后的腕臂出现“低头”现象,在扣料时还得适当的将斜腕臂管予以加长。
2.腕臂预制计算中的各项参数在腕臂的预制计算中需要明确的各项参数有:根据设计平面图、安装图,可以得到以下参数:导高、拉出值、结构高度、上下腕臂底座安装间距、侧面限界、曲线半径、定位器长度、定位器安装坡度等;需要现场测量得到的数据有:支柱斜率、支柱实际侧面限界、定位点轨顶实际超高。
接触网常用参数标准及测量计算接触网常用参数标准及测量计算一、拉出值(跨中偏移值)1、技术标准160km/h及以下区段:标准值:直线区段200-300mm;曲线区段根据曲线半径不同在0-350mm之间选用。
安全值:之字值≤400mm;拉出值≤450mm。
限界值:之字值450mm;拉出值450mm。
160km/h以上区段:标准值:设计值。
安全值:设计值±30mm。
限界值:同安全值。
2、测量方法利用DJJ多功能激光接触网检测仪进行拉出值测量:受电弓滑板平面与两钢轨平面平行,检测仪与两钢轨平面平行,测量时无需考虑外轨超高,直接校准定位点在检测仪上的投影位置,此位置与检测仪中心点的距离就是拉出值。
二、导线高度1、技术标准标准值:区段的设计采用值。
安全值:标准值±100mm。
限界值:小于6500mm;任何情况下不低于该区段允许的最低值。
当隧道间距不大于1000m时,隧道内、外的接触线可取同一高度。
2、测量方法利用DJJ多功能激光接触网检测仪进行导高测量:将测量仪置于两钢轨之上与两轨面平行,利用测量仪上的观察窗校准定位点位置,测出定位点至两轨面的垂直距离即为导高。
三、导线坡度及坡变率1、技术标准标准值: 120km/h及以下区段≤3‰;120-160km/h区段≤2‰;200km/h区段≤2‰,坡度变化率不大于1‰;200-250km/h区段≤1‰,坡度变化率不大于1‰。
安全值:120km/h及以下区段≤5‰;120-160km/h区段≤4‰。
其他同标准值。
限界值:120km/h及以下区段≤8‰;120-200km/h区段≤5‰;200km/h及以上区段同安全值。
160km/h及以上区段,定位点两侧第一根吊弦处接触线高度应相等,相对该定位点的接触线高度允许误差±10mm,但不得出现V字型。
2、测量与计算方法定位点A与定位点B之间的坡度测量:1、测出A点的导高h a;2、测出B点的导高h b;3、测出或计算出A、B之间的距离H;4、计算出A、B两点之间的导线坡度P ab=(h b -h a)/H×1000‰;5、将P ab记入定位点B的导线坡度P b,即P ab=P b。

腕臂计算模型1、平腕臂低头52mm时与水平线夹角为1度,对平腕臂长度影响为0.3mm,忽略不计;2、斜腕臂计算以下三角直角三角形计算,其中A、B值按下面方法求得;3、测量数据为:支柱侧面限界CX、线路超高h、支柱斜率&。
4、已知参数:上底座高度:Hs=7372(7822),上下底座间距1750,线间距1440,定位器开口400(350、250);5、材料数据:(上下)底座长度200;棒式绝缘子长度860-85(750-85),承力索座高度80,定位环长度50;6、图纸数据:导高6000(6450),拉出值a,结构高度7、平腕臂计算:计算总长:CXZC=CX+Hs×&-M+200(腕臂头外露)腕臂复核:CXFH=CXZC-200(底座扣料)腕臂下料:PWBXL=CXFH-860(双重绝缘860,普通750)+85(套筒长度)承力索座:CLSZ=WBXL-200-30(承力索座半宽)套管双耳wb:TGwb=WBXL-500-30(套管双耳半宽)套管双耳zc:TGzc=150-30(套管双耳半宽)8、斜腕臂计算:直角边A:A=TGwb+30(套管双耳半宽)+860(双重绝缘860,普通750)-85(套筒长度)-1.75&(斜率差)直角边B:B=1750(底座间距)-50(此处腕臂低头折算值)-80(套管双耳扣料长度)斜腕臂复核长度:XWBFH=SQRT(A^2+B^2)斜腕臂下料长度:XWBXL=XWBFH-860+85定位环位置:DWH=(6000+400-5622)×XWBFH÷A-860+85腕臂支持套管双耳位置:XTGZC= XWBXL -TGwb+150+85定位管支持套管双耳位置:TGDWZC= XTGZC+410(定位管支撑长度)+80(套管双耳扣料长度)9、定位管上计算:正定位定位管长度:ZDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+600(防风拉线长度)+200(定位管外露长度)反定位定位管长度:FDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+1200(1050定位器长度)+200(定位管外露长度)正定位管上定位环位置:ZGSDWH=ZDWGC-1200(1050定位器长度)-600-200反定位管上定位环位置:FGSDWH=FDWGC-200正定位防风拉线定位环位置:ZFFDWH= ZGSDWH-200正定位防风拉线定位环位置:FFFDWH= FGSDWH-1200(1050定位器长度)-600-200。
接触网风偏移值计算接触网支柱结构设计风荷载取值1.接触网风偏设计风速小于30 m/s时,接触网风偏设计风速作为接触网支柱标准容量设计风速;当接触网风偏设计风速大于30 m/s时,以30 m/s作为接触网支柱标准容量设计风速。
2.路基地段接触网结构设计风速,按l0 m高度的风压高度系数考虑风速;高度小于等于30 m的桥梁,按照30 m高度的风压高度系数考虑风速;高度大于30 m的桥梁,建议采用其他悬挂安装方式,以提高悬挂的可靠性及稳定性。
3.接触网支柱标准容量按接触网风偏设计风速计算,同时应考虑列车气动力影响,初步选择支柱截面尺寸,再采用结构设计风速校核支柱的强度,并以此最终确定支柱截面尺寸。
4.接触网支柱基础、基础螺栓按照结构设计风速进行设计。
目前所设计的国内高速铁路,如:郑西、武广、京津城际等均未设置挡风墙,海南东环线也未设置挡风墙。
因此可以认为30 m/s就是列车运行的最大限制风速,超过该风速,列车停运。
接触网支柱标准容量风速设计1.当接触网风偏设计风速小于30 m/s时,接触网风偏设计风速作为接触网支柱标准容量设计风速;2.当接触网风偏设计风速大于30m/s时,以30 m/s作为接触网支柱标准容量设计风速。
接触线最大偏移值的公式为:式中——————接触线和承力索单位长度的风负载(KN/m);——————接触线和承力索的张力(KN/m)。
曲线区段接触线拉出值的选择在直线区段受电弓中心与线路中心重和,接触线之字值沿线路中心对称,其标准为±300mm。
提速后为200~250mm之间;拉出值350~450mm之间。
在曲线区段,拉出值和曲线半径大小有关。
接触线拉出值是接触网自身结构参数,其取值直接影响弓网运行安全。
在运营中发现曲线区段拉出值超标严重,这是因为在设置拉出值时,未考虑受电弓中心线在气象条件、线路参数、机车及受电弓型号和参数、运营方式、运行速度等多种因素影响下的动态变化。
基于此种情况,有必要对运行速度、线路参数及施工误差等几个主要影响因素进行分析,找到曲线区段受电弓中心在动态下的侧偏规律,合理设置拉出值,提高施工质量,确保机车良好受流。
三、腕臂长度计算1-12-15 直线与曲线外侧中间柱腕臂长度计算示意图由于目前接触网结构普遍采用平腕臂结构,所以在平腕臂安装和预配过程中,需要准确确定平腕臂和斜腕臂长度,根据平腕臂长度计算,在地面预配好整体结构,对今后一次性安装成功,减少调整工作量具有重要意义。
腕臂长度计算与支柱所在位置和用途密切相关,直线和曲线计算方法不同,同样是曲线,则支柱在曲线外侧和曲线内侧时的计算方法也不同。
转换柱与中心柱的计算方法也有区别。
现就上述几种情况分别作简单介绍(仅供参考)。
(一)直线和曲线支柱腕臂长度计算图1-12-15中符号说明如下:L 1、L 2-分别表示平腕臂承力索固定点至支柱固定点长度和承力索至腕臂头长度。
(m) L 3-斜腕臂水平投影长度。
(m)L 4-非工作支承力索与工作支承力索之间的水平距离。
(m )L 平、L 斜-分别表示平腕臂底座和斜腕臂底座突出支柱部分长度。
(m)h 1-平腕臂底座与斜腕臂底座之间的垂直安装距离。
(m)h 2-斜腕臂套管双耳零件连接长度。
(m)h 3-斜腕臂垂直投影长度。
(m)h 4-支柱侧面限界测量点至平腕臂支柱固定点之间的垂直距离。
(m)H c -承力索至钢轨面的垂直高度。
(m)C x -支柱侧面限界。
(m)m c -承力索在曲线上轨平面处垂直投影与线路中心的偏移距离(a- Lh H C )。
(m) h-曲线外轨超高。
(m)1.直线区段腕臂长度计算可根据下式确定:L 1= C x +βh 4±a (m )h 3= h 1- h 2 (m )L 3= L 1 -(承力索至承力索座中心的距离)-(承力索座中心至套管双耳的距离)- βh 1 式中:a-承力索拉出值。
(m)β-支柱斜率(要考虑支柱整正后产生的斜率)。
“±”- 正定位时取“-”号,反定位时取“+”号。
平腕臂钢管长度= L 1 + L 2- L 平-L 棒 (m)斜腕臂钢管长度=2323-h L L +)(斜 -L 棒 (m)其中L 2应考虑承力索至平腕臂钢管头的距离,L 棒棒式绝缘子安装长度。
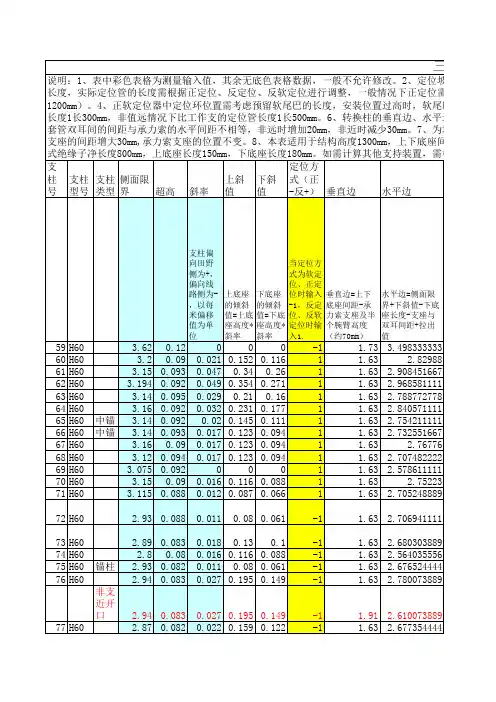
腕臂偏移值计算方法
腕臂偏移值=0.017×(安装时温度-30)×该定位点距中心锚结柱悬挂点的距离+负载驰度预留量-新线蠕变预留量
上述公式中:1、腕臂偏移值单位是毫米;
2、安装时温度指承力索归位时线材表面温度;
3、该定位点距中心锚结柱悬挂点的距离单位是米;
4、负载驰度预留量=该定位点距中心锚结柱悬挂点的跨数×4毫米;接触线未架设前进行承力索归位需要考虑负载驰度预留量,接触线架设后进行承力索归位时不考虑负载驰度预留量;
5、新线蠕变预留量=该定位点距中心锚结柱悬挂点的距离×线材蠕变系数;承力索架设后12小时以内进行承力索归位,线材蠕变系数按0.18计算;承力索架设后12-48小时以内进行承力索归位,线材蠕变系数按0.09计算;承力索架设48小时以后进行承力索归位不考虑线材蠕变量。
工程部
2013.12.6。