直接转矩控制系统
- 格式:pdf
- 大小:146.46 KB
- 文档页数:12

目录1概述 (1)2异步电机动态模型的建立 (2)2.1异步电机的三相数学模型 (2)2.2异步电机两相模型 (4)3直接转矩控制的基本原理及特点 (6)3.1直接转矩控制系统原理与特点 (6)3.2直接转矩系统的控制规律和反馈系统 (7)4系统建模与仿真 (10)4.1 Matlab/Simulink简介 (10)4.2模块模型实现 (10)4.2.1电机模型 (11)4.2.2磁通和转矩滞环控制器 (12)4.2.3磁链选择器 (13)4.2.4电压矢量选择 (14)4.2.5其他模块 (15)附录 (18)5感受和体会 (17)参考文献 (24)直接转矩控制技术仿真分析1概述异步电动机具有非线性、强耦合、多变量的性质,要获得高动态调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
直接转矩控制就是一种基于动态模型的高性能交流电动机调速系统,直接转矩系统利用转矩偏差和定子磁链幅值偏差的正、负符号,根据当前定子磁链矢量所在的位置,直接选取合适的定子电压矢量,实施电磁转矩和定子磁链的控制。
直接转矩控制系统能够实现优良的静、动态特性,但是也有其不足之处。
基于稳态数学模型的异步电动机调速系统虽然能够在一定范围内实现平滑调速,但对于轧钢机、数控机床、机器人、载客电梯等需要高动态性能的对象,就不能满足要求了。
要实现高动态性能的调速系统和伺服系统,必须依据异步电动机的动态数学模型来设计。
本说明书第二章主要讲述异步电机动态模型的建立,分析其动态模型以及控制特点。
第三章讲述直接转矩控制的特点。
第四章主要讲述仿真模型的构造。
2异步电机动态模型的建立电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势。
交流电机不同于直流电机,不能简单地分析设计调速系统,由于其动态数学模型是一个高阶、非线性、强耦合的多变量系统。
2.1异步电机的三相数学模型研究异步电机数学模型时忽略空间谐波、磁路饱和、铁心磁损,也不考虑频率变化和温度变化对绕线电阻的影响。
异步电动机直接转矩控制系统的MATLAB仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电动机直接转矩控制系统(Direct Torque Control, DTC)已成为电动机控制领域的重要研究方向。
该控制系统以其快速响应、高鲁棒性和简单的结构特性,在电力驱动、工业自动化、新能源汽车等领域具有广泛的应用前景。
本文旨在通过MATLAB仿真平台,对异步电动机直接转矩控制系统进行深入研究和探讨。
本文将首先介绍异步电动机直接转矩控制的基本原理和主要特点,包括其与传统矢量控制方法的区别和优势。
随后,将详细阐述异步电动机的数学模型,以及DTC系统中转矩和磁链的控制策略。
在此基础上,利用MATLAB/Simulink仿真软件,构建异步电动机DTC系统的仿真模型,并对仿真模型中的关键参数和模块进行详细设计。
本文的重点在于通过仿真实验,分析异步电动机DTC系统的动态性能和稳态性能,探讨不同控制参数对系统性能的影响。
将针对仿真结果中出现的问题和不足,提出相应的改进措施和优化策略,以提高DTC系统的控制精度和稳定性。
本文将对异步电动机直接转矩控制系统的未来发展趋势和应用前景进行展望,为相关领域的研究人员和工程师提供参考和借鉴。
二、异步电动机直接转矩控制系统理论基础异步电动机直接转矩控制系统(Direct Torque Control, DTC)是一种高效的电机控制策略,旨在直接控制电机的转矩和磁链,从而实现快速动态响应和优良的控制性能。
与传统的矢量控制相比,DTC具有算法简单、易于数字化实现、对电机参数变化不敏感等优点。
异步电动机DTC系统的理论基础主要建立在电机转矩和磁链的直接控制上。
在DTC中,通过检测电机的定子电压和电流,利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)或滞环比较器(Hysteresis Comparator)等控制手段,直接计算出所需的电压矢量,以实现对转矩和磁链的快速调节。
异步电动机直接转矩控制系统1直接转矩控制简介直接转矩控制( Direct Torque Control — DTC ),国外的原文有的也称为 Direct self-control — DSC,直译为直接自控制,这类“直接自控制”的思想以转矩为中心来进行综合控制,不单控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的差别是,它不是经过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的剖析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这类方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并经过磁链和转矩的直接追踪实现 PWM 脉宽调制和系统的高动向性能。
直接转矩控制系统的主要特色有:(1)直接转矩控制是直接在定子坐标系下剖析沟通电动机的数学模型,控制电动机的磁链和转矩。
(2)直接转矩控制的磁场定向采纳的是定子磁链轴,只需知道定子电阻就能够把它观测出来。
(3)直接转矩控制采纳空间矢量的观点来剖析三相沟通电动机的数学模型和控制各物理量,使问题变得简单了然。
(4)直接转矩控制重申的是转矩的直接控制成效。
直接转矩控制技术用空间矢量的剖析方法,直接在定子坐标系下计算与控制电动机的转矩,采纳定子磁场定向,借助于失散的两点式调理( Band-Band )产生 PWM 波信号,直接对逆变器的开关状态进行最正确控制,以获取转矩的高动向性能。
它省去了复杂的矢量变换与电动机的数学模型简化办理,没有往常的 PWM 信号发生器。
它的控制思想新奇,控制结构简单,控制手段直接,信号办理的物理观点明确。
为了让读者更好的理解直接转矩控制,在正式介绍三相异步电机的直接转矩控制系统前,先从直接转矩控制的基本物理观点讲起。
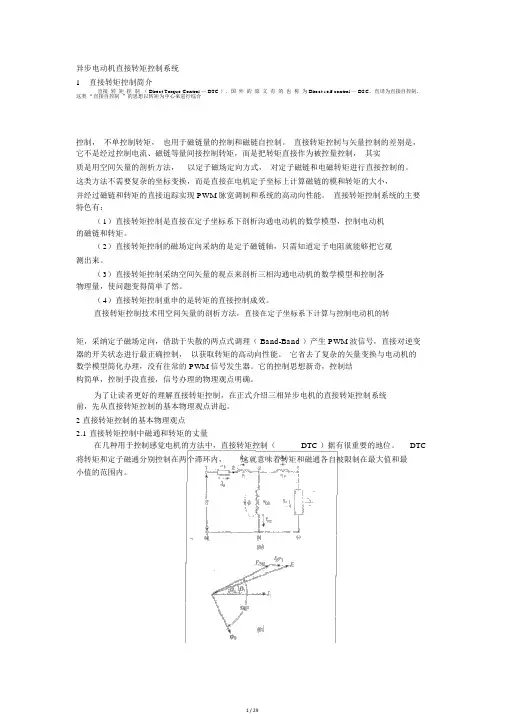
2 直接转矩控制的基本物理观点2.1 直接转矩控制中磁通和转矩的丈量在几种用于控制感觉电机的方法中,直接转矩控制(DTC )据有很重要的地位。
摘要:直接转矩控制系统简称DTC(Direct Torque Control)系统,是继矢量控制系统之后发展起来的另外一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面利用转矩反馈直接控制电机的电磁转矩,因此而得名为直接转矩控制。
在控制思想上与矢量控制不同的是直接转矩控制通过直接控制转矩和磁链来间接控制电流,不需要复杂的坐标变换,因此具有结构简单、转矩响应快以及对参数鲁棒性好等优点。
本文对直接转矩控制原理进行了简介,以及目前应用直接转矩控制的产品介绍。
关键词:直接转矩控制,异步电机目录1直接转矩控制的基本原理及特点与规律 (3)1.1直接转矩控制系统原理与特点 (3)1.2直接转矩系统的控制规律和反馈系统 (5)2 直接转矩控制的基本原理和仿真模型 (7)2.1直接转矩控制的基本原理 (7)2.2直接转矩控制的仿真模型总图 (8)3 三相异步电机的数学模型 (8)4 磁链信号和转矩信号产生 (10)4.1定子磁链的观测控制 (10)4.2 电磁转矩的有效控制 (12)总结 (13)参考文献 (14)1直接转矩控制的基本原理及特点与规律直接转矩控制系统简称DTC(Direct Torque Control)系统,是继矢量控制系统之后发展起来的另外一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面利用转矩反馈直接控制电机的电磁转矩,因此而得名为直接转矩控制。
1.1直接转矩控制系统原理与特点如图1-1为直接转矩控制的原理框图,和VC系统一样,它也是分别控制异步电动机的转速和磁链,转速调节器ASR的输出作为电磁转矩的给定信号*T,在*T后面设置转矩控制内环,它可以抑制磁链变化对于转矩的影响,从而使得转速和磁链系统实现解耦。
因此,从整体控制结构上来看,直接转矩控制(DTC)系统和矢量控制系统(VC)系统是一致的都获得了较高质量的动态性能以及静态性能。
图1-1直接转矩控制系统图的幅值从图中中可以看出,直接转矩控制系统,就是通过使定转子磁链s保持恒定,然后选择合理的零矢量的作用次序和作用时宽,以调节定子磁链矢量的运动速度,从而改变磁通角的大小,以实现对电机转矩的控制。
现代电力传动及其自动化—课程作业异步电动机直接转矩控制系统仿真1、直接转矩控制系统的基本思想直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。
直接转矩控制是标量控制。
它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。
三相异步电动机电磁转矩表达式为:))()((m e t t K T r s ΨΨ⨯=)(sin m t K r s θψψ= (1.1)r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹角,称为磁通角。
对式(1.1)分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。
若r s ψψ、 是常数,改变转矩角可改变转矩。
而且Ψr 的变化总是滞后于Ψs 的变化。
但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。
可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。
图1.1 直接转矩控制系统原理图ω在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。
由图1.1得直接转矩控制系统仿真结构框图,如图1.2所示。
图1.2 直接转矩控制系统仿真结构框图2、单元模块说明2.1 定子电压与定子电流的三二变换三相/两相变换矩阵如式(2.1),其仿真结构框图如图2.1所示。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=2323212113223c(2.1)图2.1 三相/两相变换矩阵仿真结构框图2.2 磁链估算模型经计算得定子磁链计算公式为(2.2)(2.3)(2.4),结构框图如图2.2、2.3所示。
析永磁同步电动机的直接转矩控制摘要:本文针对永磁同步电动机的直接转矩控制(Direct Torque Control, DTC)进行分析研究。
首先介绍了DTC的基本原理,然后详细阐述了DTC的实现方法和控制策略,实验结果表明,DTC可以实现快速的动态响应和高效的控制性能。
关键词:永磁同步电动机; 直接转矩控制; 方法1引言随着电力电子技术和计算机控制技术的快速发展,永磁同步电动机(PMSM)在工业、航空航天、汽车等领域得到了广泛应用。
直接转矩控制(DTC)是一种先进的控制技术,具有结构简单、动态响应快、控制精度高等优点,对于提高永磁同步电动机的性能具有重要作用。
本文将详细介绍永磁同步电动机的直接转矩控制技术,包括基本原理、实现方法、控制策略和实验验证等方面。
2永磁同步电动机的基本原理永磁同步电动机的基本原理是利用永磁体产生励磁,通过定子与转子之间的磁场相互作用产生转矩。
这种电动机主要由定子、转子和位置传感器组成。
定子由导电线圈组成,当电流通过线圈时会产生磁场。
转子由永磁体组成,产生的磁场与定子磁场相互作用产生转矩。
位置传感器用于检测转子的位置,以便控制电机运转[1]。
在永磁同步电动机的运行过程中,定子产生的磁场与转子产生的磁场之间相互作用,产生转矩。
这种相互作用使得转子能够转动起来。
位置传感器则不断检测转子的位置,并将信号传输给控制系统,控制系统根据转子的位置和转速来控制电流的流向和大小,进而控制电机的运转[2]。
3直接转矩控制的基本概念直接转矩控制是一种先进的电机控制方法,它通过直接控制电机的转矩来实现精确的转速控制。
相较于传统的电流或速度控制方法,直接转矩控制具有更高的控制精度和更快的响应速度。
该方法通过测量电机的电压和电流,利用电机数学模型计算出电机的磁链和转矩,并通过对电机的电压矢量进行控制来实现转矩的快速响应和精确控制[3]。
在直接转矩控制系统中,电机的电压矢量与磁链矢量之间的关系被用来进行转矩控制。