机械原理 第三章
- 格式:doc
- 大小:206.00 KB
- 文档页数:3


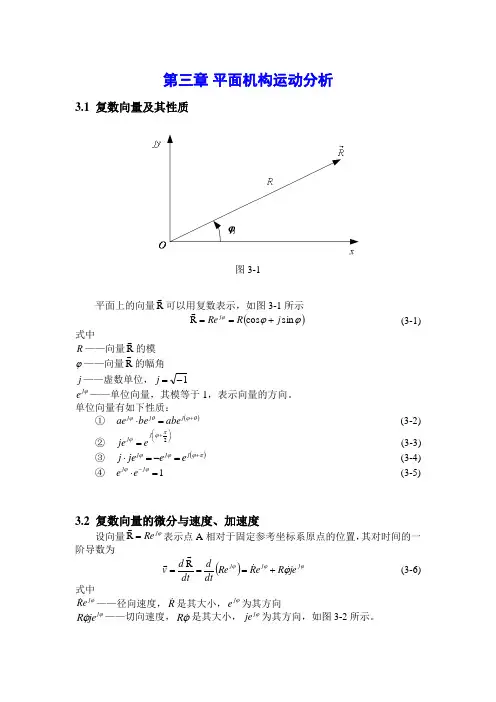
第三章 平面机构运动分析3.1 复数向量及其性质图3-1平面上的向量R可以用复数表示,如图3-1所示()ϕϕϕsin cos R j R Re j +==(3-1)式中R ——向量R的模ϕ——向量R的幅角j ——虚数单位,1-=jϕj e ——单位向量,其模等于1,表示向量的方向。
单位向量有如下性质:① ()θϕθϕ+=⋅j j j abe be ae (3-2)② ⎪⎭⎫ ⎝⎛+=2πϕϕj j e je (3-3) ③ ()πϕϕϕ+=-=⋅j j j e e je j (3-4) ④ 1=⋅-ϕϕj j e e (3-5)3.2 复数向量的微分与速度、加速度设向量ϕj Re =R表示点A 相对于固定参考坐标系原点的位置,其对时间的一阶导数为()ϕϕϕϕj j j je R e RRe dtd dt d v +===R (3-6) 式中ϕj e R——径向速度,R 是其大小,ϕj e 为其方向 ϕϕj je R ——切向速度,ϕ R 是其大小,ϕj je 为其方向,如图3-2所示。
图3-2将式(3-6)再次时间求导,有ϕϕϕϕϕϕϕj j j j je R je R e R e R dtv d dt d a2R 222++-=== (3-7) 式中ϕj e R——径向加速度,大小R ,方向ϕj e ϕϕj e R 2 -——法向加速度,大小2ϕ R ,方向ϕj e - ϕϕj je R ——切向加速度,大小ϕ R ,方向ϕj je ϕϕj je R2——哥氏加速度,大小ϕ R 2,方向ϕj je 上述加速度分量如图3-3所示。
图3-33.3 铰链四杆机构的运动分析机构的运动分析需要解决三个问题,位移、速度和加速度,其中位移的求解是最困难的。
这是因为机构的位置方程往往是非线性方程或方程组。
在位移已知的情况下,速度和加速度方程是线性的。
所以说,机构的位移分析是机构运动分析的难点。
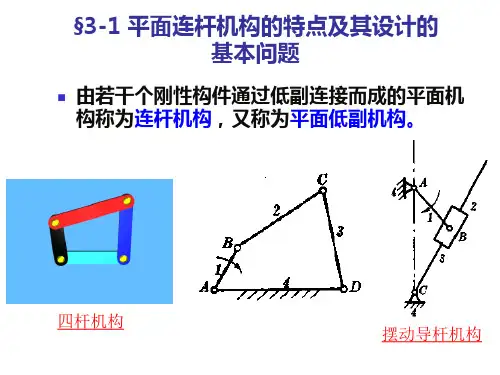
如图3-4所示,铰链四杆机构由一个双杆组和机架与原动件组成,是最简单的机构形式。
平面连杆机构习题
一、填空
1.在 条件下,曲柄滑块机构具有急回特性。
2.机构中传动角γ和压力角α 之和等于 。
3.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时, 只能获得 机构。
4.平面连杆机构是由许多刚性构件用 联接而形成的机构。
5.在摆动导杆机构中,导杆摆角
30 =ψ,其行程速度变化系数K 的值为 。
6.在四杆机构中AB BC CD AD AD
====40406060,,,,为机架,该机构是 。
7.铰链四杆机构具有急回特性时其极位夹角θ值 ,对心曲柄滑块机构的θ
值 , 所以它 急回特性,摆动导杆机构 急回特性。
8.对心曲柄滑块机构曲柄长为a ,连杆长为b ,则最小传动角γmin 等于 ,它出现在 位置。
9.图示运动链,当选择 杆为机架时为双曲柄机构;选择 杆为机架时为 双摇杆机构;选择 杆为机架时则为曲柄摇杆机构。
10.图示为一偏置曲柄滑块机构,若以曲柄为主动件,机构的最大压力角 αmax = , 发 生在 。
11.当四杆机构的压力角α=90︒时,传动角等于 ,该机构处于 位置。
12.在曲柄摇杆机构中,最小传动角发生的位置在 。
13.摆动导杆机构的极位夹角与导杆的摆角是
的。
二、判断题 1.任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K =1。
( )
2.铰链四杆机构是由平面低副组成的四杆机构。
( )
3.摆动导杆机构不存在急回特性。
( )
4.在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。
( )
5.任何平面四杆机构出现死点时,都是不利的,因此应设法避免。
( )
6.平面四杆机构有无急回特性取决于极位夹角是否大于零。
( )
7.平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值γmin不小于某一许用值¡[]γ。
()8.在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角γmin可能出现在曲柄与机架(即滑块的导路)相平行的位置。
()
9.摆动导杆机构不存在急回特性。
()
10.平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。
双摇杆机构不会出现死点位置。
()
11.在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。
()三.选择题
1.铰链四杆机构中若最短杆和最长杆长度之和大于其他两杆长度之和时,则机
构中。
A)一定有曲柄存在B)一定无曲柄存在
C)是否有曲柄存在还要看机架是哪一个构件
2.设计连杆机构时,为了具有良好的传动条件,应使。
A)传动角大一些,压力角小一些;B)传动角和压力角都小一些;
C)传动角和压力角都大一些。
3.在曲柄摇杆机构中,当摇杆为主动件,且处于共线位置时,机构处于死点位置。
A)曲柄与机架;B)曲柄与连杆;C)连杆与摇杆。
4.压力角是在不考虑摩擦情况下作用力和力作用点的方向所夹的锐角。
A)法线;B)速度;C)加速度;D)切线。
5.为使机构具有急回运动,要求行程速比系数。
A)K=1;B)K>1;C)K<1。
6.铰链四杆机构中存在曲柄时,曲柄是最短构件。
A)一定;B)不一定;C)一定不。
7.已知一铰链四杆机构ABCD,l AB=25mm,l BC=50mm,l CD=40mm,l
=30mm,且AD为机架,BC为AD之对边,那么,此机构为。
AD
A)双曲柄机构;B)曲柄摇杆机构;C)双摇杆机构;D)固定桁架。
8.下面四个机构运动简图所示的四个铰链四杆机构,图是双曲柄机构。
(A)a;(B)b;(C)c;(D)d。
(a)(b)(c)(d)
四.在铰链四杆机构中,已知l AB
=30mm ,l BC =110mm ,l CD =80mm ,l AD =120mm ,
构件 1为原动件。
(1)判断构件1能否成为曲柄;
(2)用作图法求出构件3的最大摆角ψmax ;
(3)用作图法求出最小传动角γm i n ;
(4)当分别固定构件1、2、3、4时,各获得何种机构?
m/mm
第四题图 第五题图
五.如图示曲柄滑块机构的运动简图,试确定当曲柄1等速转动时,
(1)机构的行程速度变化系数K 。
(2)最小传动角γmin 的大小。
(3)当滑块3为主动时,机构是否出现死点,为什么?
(在图中用作图法求解)
六.试设计一曲柄摇杆机构。
设摇杆两极限位置分别为ϕϕ121509040=== ,;l CD mm ,
l AD =50mm 。
用图解法求l AB 、l BC
及行程速比系数K 和最小传动角
γmin 。
第六题图 第七题图
七.已知机架AD =50mm ,摇杆CD 离机架最近极限位置β=45 ,且CD =40mm ,设
该机构为曲柄摇杆机构,且行程速比系数K =1.4,试用作图法求出曲柄AB 和连杆BC 的 长度,并绘出机构图。
八.设计一曲柄滑块机构。
已知机构处于两极限位置时,其AC 268= mm ,
AC 125= mm ,K =1.5。
求曲柄长AB 、连杆长BC 、偏心距e 和滑块的导程H 。