第六节 三相感应电动机机械特性的三种表达式
- 格式:doc
- 大小:51.50 KB
- 文档页数:3

§6-1 三相异步电动机的机械特性6.1.1三相异步电动机机械特性的三种表达式一.异步电动机机械特性的物理表达式1.异步电动机电磁转矩表达式:2.转矩常数表达式:3.转子电流表达式:4.转子电路功率因数表达式:可以看出:转差与电流、功率因数的关系及异步电动机机械特性(图6.1.1)图6.1.11.电流与转差关系(图6.1.1)I2' 最初与 s 成正比地增加,s 较大时,I2' 增加逐步减缓2.功率因数与转差关系(图6.1.1)s = 0,cosΦ'2 = 1随着 n 的逐步下降,s 增加,cos Φ'2 将逐步下降3.合成曲线J Φm ,即得 n = f(T) 的曲线,两条曲线相乘,并乘以常数 CT称为异步电动机的机械特性。
(图6.1.1)反映了不同转速时 T 与Φm 及转子电流的有功分量 I2' cosΦ'2 间的关系在物理上,这三个量的方向遵循左手定则二.异步电动机机械特性的参数表达式采用参数表达式可直接建立异步电动机工作时转矩和转速关系并进行定量分析由异步电动机的近似等效电路:1.异步电动机的机械特性参数表达式:2.异步电动机的机械特性图6.1.2 异步电动机的机械特性因为异步电动机机械特性为二次方程式,所以在某一转差率 sm 时,转矩有一最大值 Tm,该值称为异步电动机的最大转矩求出生产 Tm 时的转差 sm3.对应异步电动机的最大转矩Tm为正号对应于电动机状态,而负号则适用于发电机状态考虑 R1 << ( X1 + X2') ,可得:4.几点规律1)当电动机各参数及电源频率不变时,Tm 与 U 成正比,sm 因与 UX无关而保持不变2)当电源频率及电压不变时,sm 与 Tm 近似地与 ( X1+ X2')成反比3)Tm 与 R2' 之值无关,sm 与 R2'成正比5.电动机过载倍数 KT一般异步电动机的 K约等于 1.8 ~ 3.0T起重冶金机械用的电动机,KT 可达 3.5是电动机短时过载的极限过载倍数 KT6.起动转矩倍数 Kst异步电动机起动转矩 Tst ,即为 S = 1 时电机的电磁转矩三.机械特性的实用表达式考虑机械特性参数表达式及最大转矩 Tm 的表达式,机械特性可简化为忽略 R1 可以得到异步电动机机械特性的实用表达式这里当电动机在额定负载下运行时,转差率很小,忽略 s/sm,得:6.1.2三相异步电动机的固有机械特性和人为机械特性一.异步电动机的固有机械特性异步电动机在下述条件下工作:额定电压额定频率电动机按规定接线方法接线定子及转子电路中不外接电阻(电抗或电容)时的机械特性曲线 n = f ( T ) ,称之为固有机械特性其中:起动点额定工作点同步速点最大转矩点电动状态最大转矩点回馈制动最大转矩点A B HPP'可见:回馈制动时异步电动机过载能力大于电动状态时的过载能力二.人为机械特性由电动机的机械特性参数表达式可见:异步电动机电磁转矩T 的数值是由某一转速 n(或 s )下,电源电压 Ux、电源频率 f1、定子极对数 p、定子及转子电路的电阻 R1、R2'及电抗 X1、X2' 等参数决定人为特性,改变电源电压、电源频率、定子极对数、定子和转子电路的电阻及电抗等参数,可得到不同的人为机械特性。
三相异步电动机的机械特性————————————————————————————————作者:————————————————————————————————日期:三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下:5.1.1机械特性的物理表达式由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(),变化不大,,与转子相电流成正比关系,表现为AB段近似为直线,电磁转矩较大时 (),如,减少近一称为直线部分;当半,很小,尽管转子相电流增大,有功电不大,使电磁转矩反而减小了,此时表现为段,流段为曲线段,称为曲线部分。
《电机与拖动》课程模拟试卷(三)考试时间:90分钟一、填空题(每空1分,共30分)1、电力拖动系统根据电机的数目可以分为电力拖动系统和电力拖动系统两大类;根据转轴的数目可以分为电力拖动系统和电力拖动系统两大类,前者的运动方程为。
答案:单机、多机、单轴、多轴、T-Tz=J•d /dt(或T-Tz=GD2/375•dn/dt)2、在直流电动机的电枢回路中串电阻调速,理想空载转速(填增大、减小或不变),特性的硬度(填增大、减小或不变);降电压调速,理想空载转速(填增大、减小或不变),特性的硬度(填增大、减小或不变);减弱磁通调速,理想空载转速(填增大、减小或不变),特性的硬度(填增大、减小或不变)。
答案:不变、减小、减小、不变、增大、减小3、一台他励直流电动机采用电动机惯例,当P1=0,P M<0时,电动机运行于状态,当|E a|>|U N|,n<0时,运行于状态。
答案:能耗制动、反向回馈制动运行4、测定三相感应电动机的参数可以做的实验有和。
答案:空载实验、短路实验5、某六极三相同步电动机额定工作频率50Hz,带额定负载运行时,其转速为,如果负载转矩增加,转速会(填增大或减小或不变),会变大。
答案:1500r/min、不变、功率角7、右图是单相变压器带电感性负载运行的相量图,在图中空白位置填写相量符号。
8、一台直流电动机降压调速,在额定负载时达到的最高转速是1000r/min,最低转速是400r/min,调速范围是,最低转速特性的理想空载转速是500r/min,静差度是 。
答案:2.5、0.29、下图为他励直流电动机的功率流图,请在其中适当的位置填入:p Cua 、P 1、P M 、P 2和p 0。
答案:p Cua 、p 0、P 1、P M 、P 2(先上排后下排,从左至右)二、计算题(共30分)1、(10分)某直流他励电动机额定数据如下:P N =10[kW],U N =220[V ],n N =1000[r/min ],I N =53.2[A],电枢回路总电阻Ra =0.393[Ω],忽略空载转矩T 0,且不计电感的影响与电枢反应,电动机带额定负载运行时,(1)若电枢回路中突然串入R Ω=1.5Ω的电阻,计算串入电阻瞬间的电枢电流以及稳定后的电枢电流与转速;(2)若仅在励磁回路中串电阻,使磁通减少15%,计算磁通突然减少时瞬间的电枢电流以及稳定后的电枢电流与转速。

第六章三相异步电动机的电力拖动§6-1 三相异步电动机的机械特性机械特性是指电动机转速n与转矩T之间的关系,一般用曲线表示。
欲求机械特性,先求T与n的数学关系式,称为机械特性表达式。
有三种表达式:一。
三相异步电动机机械特性的三种表达式(一)物理表达式此式清楚表明了T和、cos之间的关系,虽然、cos与n密切有关,但不能清楚反映T与n的关系。
(二)参数表达式电磁转矩由异步电动机的近似等效电路,得代入T的公式,即得参数表达式考虑到n=(1-s)n0,,即可由此式绘出异步电动机的机械特性曲线n=f(T),如图6-1所示。
机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m。
将表达式对s求导,并令,可求出产生最大转矩T m时的转差率S m图6-1机械特性曲线S m称为临界转差率。
代入T的公式则可得T m的公式式中正号对应于电动机状态,负号适用于发电机状态。
一般,故可得近似公式可见:(1)当电动机参数和电源频率不变时,T m ,而S m与U X无关;(2)当电源电压和频率不变时,S m和T m近似与(X1+)成反比;(3)增大转子回路电阻,只能使S m相应增大,而T m保持不变。
最大转矩T m与额定转矩T N之比称为过载倍数,也称过载能力,用K T表示:一般异步电动机K T=1.8~3.0。
对于起重冶金机械用的电动机,可达3.5。
异步电动机起动时,n=0,s=1,代入参数表达式,可得起动转矩的公式由此式可知,对绕线式异步电动机,转子回路串接适当大小的附加电阻,能加大起动转矩T st,从而改善起动性能。
对于鼠笼式电动机,不能用转子串电阻的方法改善起动转矩,在设计电动机时就要根据不同负载的起动要求来考虑起动转矩的大小。
起动转矩T st与额定转矩T N之比,称为起动转矩倍数K st:K st=一般电动机K st=1.0~2.0,对于起重冶金机械用的电动机为2.8~4.0。
(三)实用表达式参数表达式在理论分析时很有用,但定、转子参数在产品目录中找不到,使用起来不方便。
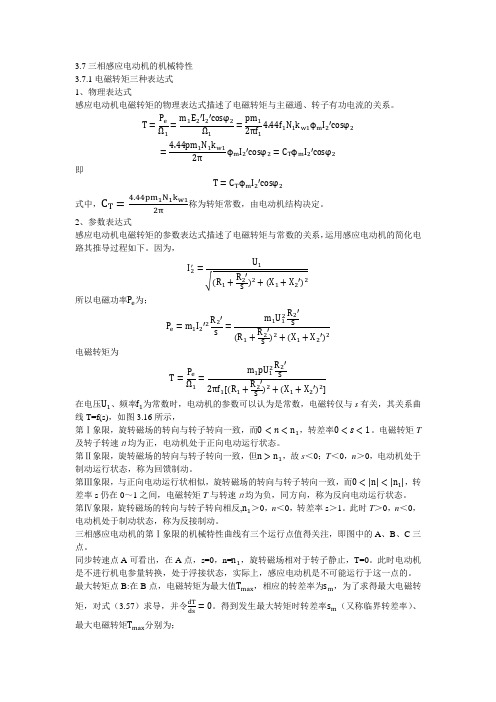
3.7三相感应电动机的机械特性3.7.1电磁转矩三种表达式 1、物理表达式感应电动机电磁转矩的物理表达式描述了电磁转矩与主磁通、转子有功电流的关系。
T =P e Ω1=m 1E 2′I 2′cos φ2Ω1=pm 12πf 14.44f 1N 1k w 1ϕm I 2′cosφ2=4.44pm 1N 1k w 1ϕm I 2′cosφ2=C T ϕm I 2′cosφ2即T =C T ϕm I 2′cosφ2式中,C T=4.44pm 1N 1k w 12π称为转矩常数,由电动机结构决定。
2、参数表达式感应电动机电磁转矩的参数表达式描述了电磁转矩与常数的关系,运用感应电动机的简化电路其推导过程如下。
因为,I 2′=U 1(R 1+R 2′s)2+(X 1+X 2′)2所以电磁功率P e 为;P e =m 1I 2′2R 2′=m 1U 12R 2′s(R 1+R 2′s )2+(X 1+X 2′)2电磁转矩为T =P e Ω1=m 1pU 12R 2′s2πf 1[(R 1+R 2′s )2+(X 1+X 2′)2]在电压U 1、频率f 1为常数时,电动机的参数可以认为是常数,电磁转仅与s 有关,其关系曲线T=f(s),如图3.16所示,第Ⅰ象限,旋转磁场的转向与转子转向一致,而0<n <n 1,转差率0<s <1。
电磁转矩T 及转子转速n均为正,电动机处于正向电动运行状态。
第Ⅱ象限,旋转磁场的转向与转子转向一致,但n >n 1,故s <0;T <0,n >0,电动机处于制动运行状态,称为回馈制动。
第Ⅲ象限,与正向电动运行状相似,旋转磁场的转向与转子转向一致,而0< n < n 1 ,转差率s 仍在0~1之间,电磁转矩T 与转速n均为负,同方向,称为反向电动运行状态。
第Ⅳ象限,旋转磁场的转向与转子转向相反,n 1>0,n <0,转差率s >1。
此时T >0,n <0,电动机处于制动状态,称为反接制动。

第六节三相感应电动机机械特性的三种表达式
物理表达式
参数表达式
实用表达式
机械特性指转速n与转矩T之间的关系。
有物理表达式,参数表达式,实用表达式。
一、物理表达式:
将曲线与曲线相乘,再乘以转矩常数等就可得到曲线。
二、参数表达式:回顶部
为反映电机参数与电磁转矩的关系,从电机的等值电路图及电磁转矩的公式推导参数表达式:
这样可绘制机械特性曲线,曲线形式与物理表达式绘制的一样。
是s的二次曲线。
将上述转矩公式对转差率s求导数,可得到临界转差率和最大转矩公式。
分析:回顶部
1、各参数及电源频率不变时,临界转差与定子相电压无关;而。
2、不变时,临界转差和最大电磁转矩反比于。
3、最大电磁转矩与转子电阻无关,临界转差与转子电阻成正比。
当转子回路串入电阻使临界转差等于1时,可求出转子外串的电阻值;过载倍数:电机短时过载的
极限。
4、起动转矩:当S=1时的电磁转矩:
起动转矩倍数:,只有当时,电机才能起动。
三、实用表达式:
一般电机产品目录中,有些参数没有,用参数表达式不方便,因此将M的参数表达式除以M m参数表达式,并代入S m值,有
这种实用表达式中只有两个未知数,可绘制机械特性。
总之:物理表达式用于定性分析转矩与磁通,转子电流间的关系;参数表达式用于分析电机参数变化对电机运行性能的影响。
实用表达式用于工程计算。
第六节三相感应电动机机械特性的三种表达式
物理表达式
参数表达式
实用表达式
机械特性指转速n与转矩T之间的关系。
有物理表达式,参数表达式,实用表达式。
一、物理表达式:
将曲线与曲线相乘,再乘以转矩常数等就可得到曲线。
二、参数表达式:回顶部
为反映电机参数与电磁转矩的关系,从电机的等值电路图及电磁转矩的公式推导参数表达式:
这样可绘制机械特性曲线,曲线形式与物理表达式绘制的一样。
是s的二次曲线。
将上述转矩公式对转差率s求导数,可得到临界转差率和最大转矩公式。
分析:回顶部
1、各参数及电源频率不变时,临界转差与定子相电压无关;而。
2、不变时,临界转差和最大电磁转矩反比于。
3、最大电磁转矩与转子电阻无关,临界转差与转子电阻成正比。
当转子回路串入电阻使临界转差等于1时,可求出转子外串的电阻值;过载倍数:电机短时过载的
极限。
4、起动转矩:当S=1时的电磁转矩:
起动转矩倍数:,只有当时,电机才能起动。
三、实用表达式:
一般电机产品目录中,有些参数没有,用参数表达式不方便,因此将M的参数表达式除以M m参数表达式,并代入S m值,有
这种实用表达式中只有两个未知数,可绘制机械特性。
总之:物理表达式用于定性分析转矩与磁通,转子电流间的关系;参数表达式用于分析电机参数变化对电机运行性能的影响。
实用表达式用于工程计算。