三相异步电动机的机械特性
- 格式:docx
- 大小:41.83 KB
- 文档页数:16
实验4:三相异步电动机在各种运行状态下的机械特性实验目的:1、了解三相异步电动机的基本结构和工作原理;2、学习三相异步电动机的电气参数计算方法;4、掌握测量三相异步电动机的机械特性的方法。
实验原理:三相异步电动机是一种广泛应用的电动机,其基本结构和工作原理如下图所示:三相异步电动机的主要部件包括:旋转部分和定子部分。
旋转部分包括转子和轴承等部分,定子部分包括绕组、铁心、端盖等部分。
在三相交流电压的作用下,定子上的三组绕组会产生旋转磁场,在旋转磁场的作用下,转子上的导体产生感应电动势,从而在转子中产生转动力矩。
由于转子中感应电动势的存在,转子的转速与旋转磁场的同步速度是有一定差距的,因此称之为异步电动机。
三相异步电动机的主要电气参数有定子电阻、定子电感、转子电阻、转子电感、互感系数和空载电流等,这些参数与三相异步电动机的机械特性密切相关。
三相异步电动机的机械特性包括:空载特性、转矩特性和效率特性。
其中空载特性是指在无负载情况下,机械输出功率与输入电功率之比;转矩特性是指在有负载的情况下,三相异步电动机的旋转磁场力矩和负载之间的关系;效率特性是指在不同运行状态下,三相异步电动机的效率和输入电功率之间的关系。
实验内容:1、接线及仪器调整:根据图1所示连接电路,仪表的电压选择250V档,电流选择10A 档。
2、实验步骤:(1)打开柜门,启动三相异步电动机,使其无负载运行。
(2)调整滑动变阻器,依次改变定子电压,记录定子电流、转速、输入电功率和输出电功率。
(3)理论计算机械输出功率和机械效率,并与实验测量结果进行比较。
3、实验结果与分析:(1)绘制三相异步电动机空载特性曲线。
(2)比较理论计算结果与实验测量结果,分析其差异的原因。
(3)计算旋转磁场力矩和负载间的关系,并绘制转矩特性曲线。
实验注意事项:1、实验过程中,电动机的运行状态要保持稳定,否则会影响测量结果。
2、实验时需要注意安全,避免触电等意外情况的发生。
三相异步电动机的机械特性
三相异步电动机的机械特性(1)转子机械特性转子是定子绕组中通过一对或几对磁极而产生旋转磁场,在转子导条轴上装有铁芯和滑环。
由于各种原因会使转子发生振动。
为了保证起动时的正常运行,要求转子机械特性曲线应与负载所需的机械特性曲线相符合。
三相异步电动机的机械特性(2)磁路机械特性当定子绕组通以直流电后,便产生感应电势,并随着转速增大而增大,同时转子也将感应出较强的交变磁场,这个磁场称为旋转磁场,它可分解成若干个正弦波,在空间形成闭合回路,并沿转轴作切割磁力线的运动。

三相异步电动机的机械特性引言三相异步电动机是目前工业用电动机中广泛使用的一种电机,具有结构简单、成本低、效率高等优点。
本文将着重介绍三相异步电动机的机械特性,包括转速、转矩、效率等方面。
转速三相异步电动机的转速主要取决于供电电源的频率和极对数。
一般来说,三相异步电动机的额定转速为每分钟1450转或每分钟2900转,对应的供电电源频率分别为50Hz和60Hz。
除了额定转速外,三相异步电动机还有超额定转速和滑差转速。
超额定转速是指电机的转速高于额定转速,通常只能在短时间内工作,例如起动前的转速提高。
滑差转速是指电动机在空载时的转速,通常比额定转速略高一些。
转矩三相异步电动机的转矩可以分为起动转矩、额定转矩和最大转矩三种。
起动转矩是指电动机在启动时需要克服惯性负载等因素所需的转矩,通常是额定转矩的23倍。
额定转矩是指电机在额定工作条件下所需的转矩,通常为电机的额定输出功率与额定转速的乘积除以转子的转速。
最大转矩是指电机可2倍。
以承受的最大转矩,通常为额定转矩的1.5效率三相异步电动机的效率是指输出功率与输入功率的比值,通常用百分比表示。
三相异步电动机的效率通常在75%~95%之间,其中额定效率是指在额定工作条件下的效率,是电机最重要的性能指标之一。
三相异步电动机的效率取决于多种因素,包括电机本身的设计、工作条件、负载特性等。
在实际应用过程中,为了提高三相异步电动机的效率,可以采取如下措施:1.选择合适的电机型号和规格;2.优化电机的设计参数,例如提高功率因数、降低铁损和电阻损耗等;3.选择合适的工作条件,例如控制负载、降低温度等;4.定期维护和检查电机,保持电机状态良好。
三相异步电动机是工业应用最广泛的电动机之一,具有转速稳定、转矩大、效率高等优点。
本文介绍了三相异步电动机的机械特性,包括转速、转矩和效率等方面,希望对读者理解和应用三相异步电动机有所帮助。
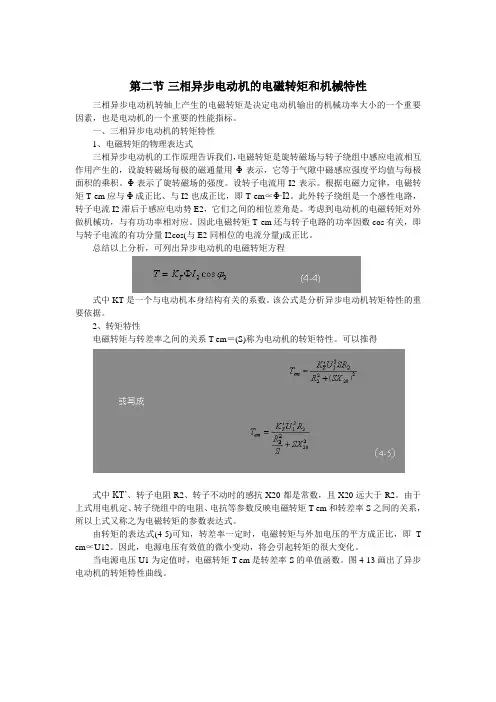
第二节三相异步电动机的电磁转矩和机械特性三相异步电动机转轴上产生的电磁转矩是决定电动机输出的机械功率大小的一个重要因素,也是电动机的一个重要的性能指标。
一、三相异步电动机的转矩特性1、电磁转矩的物理表达式三相异步电动机的工作原理告诉我们,电磁转矩是旋转磁场与转子绕组中感应电流相互作用产生的,设旋转磁场每极的磁通量用Φ表示,它等于气隙中磁感应强度平均值与每极面积的乘积。
Φ表示了旋转磁场的强度。
设转子电流用I2表示。
根据电磁力定律,电磁转矩T em应与Φ成正比、与I2也成正比,即T em∝Φ·I2。
此外转子绕组是一个感性电路,转子电流I2滞后于感应电动势E2,它们之间的相位差角是。
考虑到电动机的电磁转矩对外做机械功,与有功功率相对应。
因此电磁转矩T em还与转子电路的功率因数cos有关,即与转子电流的有功分量I2cos(与E2同相位的电流分量)成正比。
总结以上分析,可列出异步电动机的电磁转矩方程式中KT是一个与电动机本身结构有关的系数。
该公式是分析异步电动机转矩特性的重要依据。
2、转矩特性电磁转矩与转差率之间的关系T em=(S)称为电动机的转矩特性。
可以推得式中KT’、转子电阻R2、转子不动时的感抗X20都是常数,且X20远大于R2。
由于上式用电机定、转子绕组中的电阻、电抗等参数反映电磁转矩T em和转差率S之间的关系,所以上式又称之为电磁转矩的参数表达式。
由转矩的表达式(4-5)可知,转差率一定时,电磁转矩与外加电压的平方成正比,即T em∝U12。
因此,电源电压有效值的微小变动,将会引起转矩的很大变化。
当电源电压U1为定值时,电磁转矩T em是转差率S的单值函数。
图4-13画出了异步电动机的转矩特性曲线。
二、三相异步电动机的机械特性当电源电压U1和转子电路参数为定值时,转速n和电磁转矩T的关系n=f(T)称为三相异步电动机的机械特性。
机械特性曲线可直接从转矩特性曲线变换获得。
将图4-15中的转矩特性曲线顺时针转动90°,并将s换成n就可以得到三相异步电动机的机械特性曲线,如图4-16所示。
实验五 三相异步电动机在各种运行状态下的机械特性【思考要点】1. 如何利用现有设备测定三相绕线式异步电动机的机械。
2. 测定各种运行状态下的机械特性应注意哪些问题。
3. 如何根据所测得的数据计算被试电机在各种运行状态下的机械特性。
【实验原理】三相异步电动机的定、转子之间没有直接电的联系,它们之间的联系是通过电磁感应而实现的。
一台三相异步电动机的电磁转矩的大小决定了其拖动负载的能力,而三相异步电动机的电磁力矩的大小不仅与电动机本身的参数有关,也和其外加电源的电压有关。
本实验围绕异步电动机的电磁力矩和其参数、外加电压的关系以及各种运行状态等电力拖动问题进行展开。
1. 三相异步电动机的机械特性机械特性是指电动机转速n 与转矩T 之间的关系,一般用曲线表示。
欲求机械特性,先求T 与n 的数学关系式,称为机械特性表达式。
电磁转矩''21200em R m I P s T ==ΩΩ由异步电动机的近似等效电路,得()'22'2'2112X U I R R X X s =⎛⎫+++ ⎪⎝⎭ 代入T 的公式,即得参数表达式)()('212'21'221X X s R R sR U mT X+++Ω=考虑到0(1)n s n =-, 00260n πΩ=, 即可由此式绘出异步电动机的机械特性曲线()n f t =,如图6.24所示。
图6.24 三相异步电动机机械特性机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m 。
将表达式对s 求导,并令0dTds=,可求出产生最大转矩T m 时的转差率S m()'222'112m R S R X X =±++S m 称为临界转差率。
代入T 的公式则可得T m 的公式()2122'011122Xm U T R R X X =±Ω⎡⎤±+++⎢⎥⎣⎦式中正号对应于电动机状态,负号适用于发电机状态。
三相异步电动机的机械特性
1.三相异步电动机的电磁转矩
三相异步电动机的转矩:
三相异步电动机的转矩是由旋转磁场的每极磁通Φ与转子电流I2相互作用而生成的。
它与Φ和I2 的乘积成正比,此外,它还与转子电路的功率因素cosφ2 有关。
转矩表达式:
式中,K——与电动机结构参数、电源频率有关的一个常数;
U1,U ——定子绕组相电压,电源相电压;
R2——转子每相绕组的电阻;
X20——电动机不动(n=0)时转子每相绕组的感抗。
2.三相异步电动机的固有机械特性
固有机械特性:
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中的不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性。
电动机的抱负空载转速:
额定转矩及额定转差率:S=(N1-N2)/N1
转矩-转差率特性的有用表达式,即规格化转矩-转差率特性。
3.三相异步电动机的人为机械特性
人为机械特性:
异步电动机的机械特性与电动机的参数有关,也与外加电源电压、电源频率有关,将关系式中的参数人为地加以转变而获得的特性称为异步电动机的人为机械特性。
电压U的变化对抱负空载转速no和临界转差率Sm不发生影响,但最大转矩Tmax与U2成正比,当降低定子电压时,no和Sm不变,而Tmax大大减小。
在同一转差率状况下,人为特性与固有特性的转矩之比等于电压的平方之比。
因此在绘制降低电压的人为特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘降低电压与额定电压比值的平方,即可作出人为特性曲线:
在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低。
三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下:5.1.1机械特性的物理表达式由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(),变化不大,,电磁转矩与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时(),如,减少近一半,很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为段,段为曲线段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。
三相异步电动机的机械特性三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性(返回顶部)三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下: 5.1.1机械特性的物理表达式(返回顶部)由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量因数,转子相电流,以及为转子功率与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(电磁转矩与转子相电流),变化不大,,成正比关系,表现为AB 段近似为直线,) ,如,减少近一称为直线部分;当较大时 (半,很小,尽管转子相电流增大,有功电流段,段为曲线不大,使电磁转矩反而减小了,此时表现为段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。
5.1.2机械特性的参数表达式(返回顶部) 1. 参数表达式的推导:三相异步电动机的机械特性的参数表达式就是直接表示异步电动机的电磁转矩与转差率和电机的某些参数(的关系的数学表达式。
现推导如下:及阻抗等)之间已知,电磁转矩与转子电流关系为(5.3)根据三相异步电动机的等值电路中,由于励磁阻抗比定子、转子漏阻抗大很多,把型等值电路中励磁阻抗这一段电路近似为开路,而计算的误差很小,故式(5.4)代入(5.3),得(5.4)(5.5)这就是机械特性的参数表达式。
给定出曲线便是及阻抗等参数,画曲线,其形状与图5.1一致。
由参数表达式绘制的三相异步电动机的机械特性如图5.5所示,它具有以下特点:在时,即的范围内,特性在第一象限,电磁转矩与转速都为正,从规定正方向判断,与同方向,与同步转速同方向,电动机工作在电动运行状态;在时,即,特性在第也是二象限,电磁转矩为负值,表现为制动性转矩,电磁功率负值,电动机工作在电动发电运行状态;在在第四象限,时,即,特性,电动机工作在制动运行状态。
2. 机械特性曲线的分析:下面分析图5.5机械特性中的几个特点:(1)同步转速点:其特点是。
点为理想空载运行点即在没有外界转矩的作用下,异步电动机本身不可能达到同步转速点。
(2)额定运行点:其特点是电磁转矩和转速均为额定值,用表示,相应的额定转差率用定状态。
(3)最大转矩点:其特点是对应的电磁转矩为最大值大转矩,对应的转差率用对求导,并令和表示。
异步电动机可长期运行在额,称为最,称为临界转差率。
把式(5.5)中的和临界转差率为,即可得到最大转矩(5.6)(5.7)式中,“+”号适用于电动机状态,“-”号适用于发电机状态。
通常情况下,等值电路的绝对值大于的数值,但是异步电动机的型不超过的5%,则式(5.6)和(5.7)中可以忽略的影响,则有(5.8)(5.8)也就是说,异步电动机的机械特性具有对称性,即异步电动机的发电机状态和异步电动机的电动机状态的最大电磁转矩绝对值及对应的临界转差率可认为近似相等。
通过式(5.8),可得出下列结论: 1)最大电磁转矩这说明改变和与电压平方成正比,与漏电抗的大小;成反比, 与的成反比。
,可改变2)临界转差率大小无关。
最大电磁转矩与电阻成正比,与漏电抗与额定电磁转矩的比值称为最大电磁转矩倍数,表示,即又称为过载能力或过载倍数,用是三相异步电动机运行性能的一个重要参数。
三相异步电动机运行时,绝不可能长期运行在最大转矩处。
因为,此时电流过大,温升会超过允许值,有可能烧毁电机,同时在最大转矩处运行转速也不稳定。
一般情况下,三相异步电动机的专用的三相异步电动机的=1.6~2.2,起重、冶金、机械=2.2~2.8。
(4)起动点:其特点是对应的转速,, 对应的转矩称为起动转矩,又称为堵转转矩。
它是异步电动机接通电源开始起动时的电磁转矩。
若令式(5.5)中的,即有通过式(5.9)可以得出下列结论:或漏电抗小;电源电压(5.9)与电压平方成正比,与电阻成反比。
这说明电阻或漏电抗越大,起动转矩越过低,会引起起动转矩明显下降,甚至使,而造成电机不能起动。
起动转矩与额定转矩的比值称为转矩倍数,用表示,即是表征三相异步电动机起动性能的另一个重要参数。
三相异步电动机起动时,必须保证有一定的过载倍数。
只有才能在额定负载下起动。
一般情况下,是针对鼠笼式电动机而言。
因为绕线式电动机通过>1时,异步电动机增加转子回路的电阻,可加大或改变起动转矩。
这是绕线式电动机的优点之一。
一般的鼠笼式电动机的机械专用的鼠笼式电动机的=1.0~2.0;起重、冶金、=2.8~4.0。
5.1.3机械特性的实用表达式(返回顶部)1. 实用表达式的推导:实际应用时,三相异步电动机的参数(,,,等)在电机产品的目录中是查不到的,因此使用参数表达式和物理表达式一样也是不方便的。
为了能利用三相异步电动机产品说明书中给出的数据,计算出异步电动机的机械特性,有必要导出实用的表达式。
用式(5.5)去除式(5.6)得(5.1由式(5.5)得由式(5.11)代入式(5.10)得0)5.11)5.12)((式中。
对于三相异步电动机,其=0.1~0.2范围内。
上式中显然对任何值,都有(5.13), 可忽略。
则式(5.13)可简化为(5.14)这就是三相异步电动机机械特性的实用表达式。
2. 实用表达式的使用从实用表达式看出,只需求出最大转矩出。
下面介绍和临界转差率,才能求和的求法。
),额定转速已知三相异步电动机的铭牌数据中额定功率(()和过载倍数,则额定输出转矩为额定转差率为忽略空载转矩,近似认为式(5.14)得,(当时),且,代入由上式可得解之得, 故上式应取“+”号,则(5.15)算出和,只需给出值,就可算出相应的值。
=150, 额定电压例 5.1 已知一台三相异步电动机,额定频率380 , 额定转速,路不串入电阻时,(1)求其转矩的实用表达式;(2)问电动机能否带动额定负载起动。
解:(1)根据已知数据,电机的额定转矩为=1460,过载倍数=2.4。
当转子回最大转矩为根据额定转速则额定转差率为=1460,可判断出同步转速=150,临界转差率为转子不串电阻的实用表达式为(2)电机开始起动时,=1,=,代入实用表达式得因为<, 故电动机不能拖动额定负载起动。
3. 实用表达式的简化在0<<的直线段,即三相异步电动机在额定负载范围内运行=0.01~0.05),可认为时,它的转差率小于额定转差率(实用公式中忽略 /也是可以的。
则实用表达式(5.14)变成为(5.16)经过以上简化,使三相异步电动机的机械特性呈线性关系,使用起来更方便,并称为机械特性的近似表达式。
在使用式(5.16)时可按下式计算上述三相异步电动机机械特性的三种表达式,虽然都能用来表征电动机的运行特性,但其应用的场合各有不同。
一般来说,物理表达式适用于对电动机的运行作定性分析;参数表达式适用于分析电机各种参数变化对电动机运行特性的影响;实用表达式适用于电动机机械特性的工程计算。
5.1.4机械特性的固有特性和人为特性(返回顶部) 1. 固有机械特性三相异步电动机的定子在额定频率的额定电压下,定子绕组按规定的接线方式联结,定子及转子回路不外接任何电器元件的条件下的机械特性称为固有机机械特性。
其形状如图5.5所示。
三相异步电动机的固有机械特性可以利用实用表达式(5.14)计算得到。
方法是先利用实用表达式计算出同步转速点,额定运行点,最大转矩点和起动点这几个特殊点,然后将这些点连接起来便得到固有特性曲线。
当然,计算的点越多,做出的曲线就越精确。
例5.2 某三相异步电动机,,=60,=750,=50=2.5,试绘出电动机的固有机械特性。
解:(1)同步转速点:=0时,=750,=0(2)额定运行点:(3)最大转矩点:(4)==(4)起动点:将=1时代入公式得根据上述求出的四个特殊点,绘出固有机械特性如图5.6所示。
2. 人为机械特性人为地改变三相异步电动机的某些参数所得到的机械特性称为人为特性。
关于人为特性的分析,主要是分析下列四个公式的特性。
同步转速公式临界转差率公式最大转矩公式起动转矩公式下面分析几种常见的人为机械特性。
(1)降低定子回路端电压的人为机械特性。
根据上述四个公式,降低定子回路端电压和与,则不变,不变,成正比地降低。
由于三相异步电动机的磁路在额定电压下已有饱和的趋势,故不宜再升高电压。
图5.7所示为=0.8,=0.5时的人为机械特性。
定子回和路端电压降低后的人为机械特性,其线性段的特性变软了。
且也显著地减小,电动机的过载能力也显著地下降。
(2)转子回路内串接对称电阻时的人为机械特性。
绕线式三相异步电动机的转子回路内可以串接电阻(要求三相串接的电阻阻值相等)。
其电路图及人为机械特性如图5.8所示。
根据上述四个公式,不变,不变,随的增大而增大,=开始随的增大而增大,当增大到某一时,继续增大,则开始减小。
如果再绕线式三相异步电动机的转子回路串接电阻后,电阻越大,其线性段的特性越软。
(3)定子回路串接对称电抗或电阻时的人为机械特性。
的电路图和人为机械特三相异步电动机的定子回路串接对称电抗性如图5.9所示。
根据上述四个公式,不变,线性段的特性变软了。
、和随的增大而减小,其同理,可分析定子回路串接对称电阻时的人为机械特性。
5.1.5稳定运行问题(返回顶部)电力控制系统能否稳定运行,决定于电动机的机械特性载转矩特性和负的配合。
其稳定运行的条件是在这两条特性曲线的交点应满足关系式或,应即电动机拖动继续负载稳定运行时,电磁转矩和负载转矩该是大小相等方向相反。
根据电动机稳定运行的条件,图5.10( ) 中对于电动机机械特性的线性段是能正常运行的。