三相异步电动机的机械特性和各种运行状态
- 格式:ppt
- 大小:532.00 KB
- 文档页数:39
精品文档三相异步电动机在各种运行状态下的机械特性一、实验目的了解三相线绕式异步电动机在各种运行状态下的机械特性。
二、预习要点1、如何利用现有设备测定三相线绕式异步电动机的机械特性。
2、测定各种运行状态下的机械特性应注意哪些问题。
3、如何根据所测出的数据计算被试电机在各种运行状态下的机械特性。
三、实验项目1、测定三相线绕式转子异步电动机在R=0时,电动运行状态和再生发电制动状态下的机械特性。
S2、测定三相线绕转子异步电动机在R=36Ω时,测定电动状态与反接制动状态下的机械特性。
S3、R=36Ω,定子绕组加直流励磁电流I=0.36A及I=0.6A时,分别测定能耗制动状态下的机械特21S性。
四、实验方法2、屏上挂件排列顺序D51 D34-2 、精品文档.精品文档1S2I1A4R3*U*SW21RV s1V R s I1WAWR12s**A2R12'1'I a I f+源+R V2电UGMV组机0a源2枢2V绕电电20电-磁流磁2 2励直励-图6-2 三相线绕转子异步电动机机械特性的接线图3、R=0时的反转性状态下机械特性、电动状态机械特性及再生发电制动状态下机械特性。
S用编号接线,图中M用编号为DJ17的三相线绕式异步电动机,U=220V,Y接法。
MG(1)按图6-2N 合在左S合向左边1端,、S选用D51挂箱上的对应开关,并将S为DJ23的校正直流测功机。
S、S21213、串上四只900Ω180Ω阻值加上R3、R5R边短接端(即线绕式电机转子短路),S合在2'位置。
选用R2的13上R7选用1800Ω阻值,RMET01电源控制屏上两只联再加R1300Ω并联共4430Ω阻值,R选用R1上S2,交流电500V200mA,V的量程为的量程为36Ω的电阻,R暂不接。
直流电表A、A5A,A量程为23243 A量程为3A。
的量程为表V500V,11的定子绕组接成星形的情况下。
M2'位置,端,(2)确定S合在左边1S合在左边短接端,S合在312阻值置最大位置,将控制屏左侧三相调压器旋钮向逆时针方向旋到底,即把输出电压调到零。


实验五 三相异步电动机在各种运行状态下的机械特性【思考要点】1. 如何利用现有设备测定三相绕线式异步电动机的机械。
2. 测定各种运行状态下的机械特性应注意哪些问题。
3. 如何根据所测得的数据计算被试电机在各种运行状态下的机械特性。
【实验原理】三相异步电动机的定、转子之间没有直接电的联系,它们之间的联系是通过电磁感应而实现的。
一台三相异步电动机的电磁转矩的大小决定了其拖动负载的能力,而三相异步电动机的电磁力矩的大小不仅与电动机本身的参数有关,也和其外加电源的电压有关。
本实验围绕异步电动机的电磁力矩和其参数、外加电压的关系以及各种运行状态等电力拖动问题进行展开。
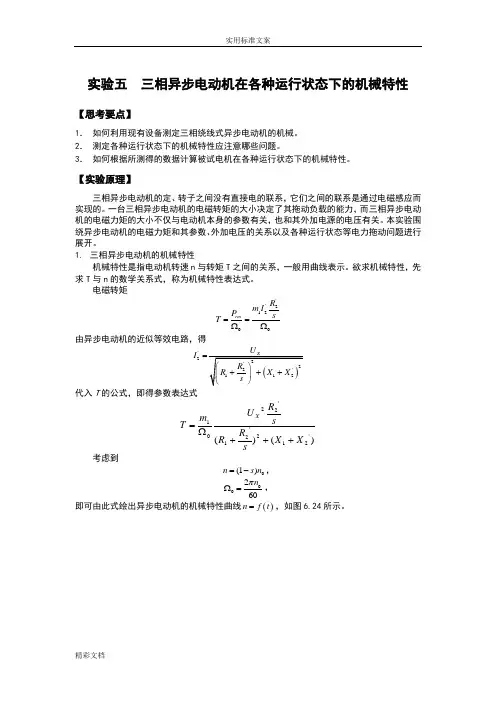
1. 三相异步电动机的机械特性机械特性是指电动机转速n 与转矩T 之间的关系,一般用曲线表示。
欲求机械特性,先求T 与n 的数学关系式,称为机械特性表达式。
电磁转矩''21200em R m I P s T ==ΩΩ由异步电动机的近似等效电路,得()'22'2'2112X U I R R X X s =⎛⎫+++ ⎪⎝⎭ 代入T 的公式,即得参数表达式)()('212'21'221X X s R R sR U mT X+++Ω=考虑到0(1)n s n =-, 00260n πΩ=, 即可由此式绘出异步电动机的机械特性曲线()n f t =,如图6.24所示。
图6.24 三相异步电动机机械特性机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m 。
将表达式对s 求导,并令0dTds=,可求出产生最大转矩T m 时的转差率S m()'222'112m R S R X X =±++S m 称为临界转差率。
代入T 的公式则可得T m 的公式()2122'011122Xm U T R R X X =±Ω⎡⎤±+++⎢⎥⎣⎦式中正号对应于电动机状态,负号适用于发电机状态。
6-2 三相异步电动机在各种运行状态下的机械特性一、实验目的了解三相线绕式异步电动机在各种运行状态下的机械特性。
二、预习要点1、如何利用现有设备测定三相线绕式异步电动机的机械特性。
2、测定各种运行状态下的机械特性应注意哪些问题。
3、如何根据所测出的数据计算被试电机在各种运行状态下的机械特性。
三、实验项目1、测定三相线绕式转子异步电动机在R S=0时,电动运行状态和再生发电制动状态下的机械特性。
2、测定三相线绕转子异步电动机在R S=36Ω时,测定电动状态与反接制动状态下的机械特性。
3、R S=36Ω,定子绕组加直流励磁电流I1=0.6I N及I2=I N时,分别测定能耗制动状态下的机械特性。
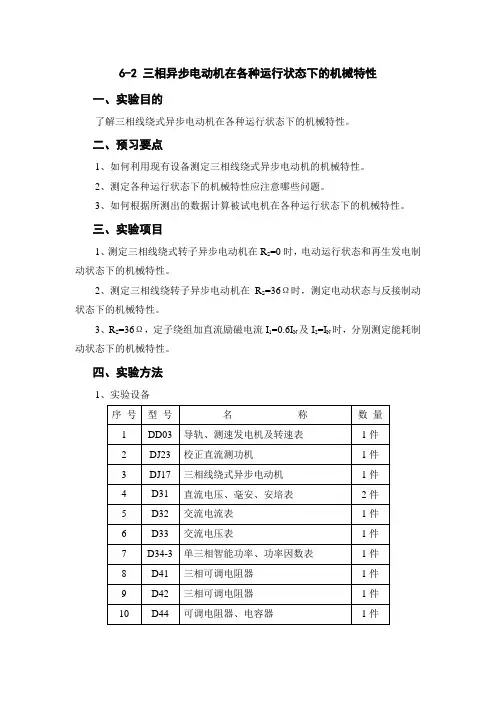
四、实验方法1、实验设备2、屏上挂件排列顺序D33、D32、D34-3、D51、D31、D44、D42、D41、D31 3、R S =0时的电动及再生发电制动状态下的机械特性。
图6-2 三相线绕转子异步电动机机械特性的接线图(1)按图6-2接线,图中M 用编号为DJ17的三相线绕式异步电动机,额定电压:220V,Y 接法。
MG 用编号为DJ23的校正直流测功机。
S 1、S 2、、S 3选用D51挂箱上的对应开关,并将S 1合向左边1端,S 2合在左边短接端(即线绕式电机转子短路),S 3合在2'位置。
R 1选用D44的180Ω阻值加上D42上四只900Ω串联再加两只900Ω并联共4230Ω阻值,R 2选用D44上1800Ω阻值,R S 选用D41上三组45Ω可调电阻(每组为90Ω与90Ω并联),并用万用表调定在36Ω阻值,R 3暂不接。
直流电表A 2、A 4的量程为5A ,A 3量程为200mA ,V 2的量程为1000V ,交流电压表V 1的量程为150V ,交流电流表A 1量程为2.5A 。
(2) 确定S 1合在左边1端,S 2合在左边短接端,S 3合在2'位置,M 的定子绕组接成星形。
把R 1、R 2阻值置最大,将控制屏左侧三相调压器旋钮向逆时针方电枢电源向旋到底,即把输出电压调到零。

工艺与装备143三相异步电动机的机械特性、启动、制动与调速刘宗涛毕强(九江职业技术学院,九江332000)摘要:通过对概念的解释和详尽的分析,对三相异步电动机的四个方面进行阐述,即三相异步电动机的机 械特性、启动、制动以及调速。
对三相异步电动机的一些特点进行描述,如结构较为简单、费用低、维护方便等。
现代社会,异步电动机的电力拖动应用非常广泛。
在解析三相异步电动机机械特性的基础上,对异步电动机的启 动、制动以及调速的一些技术问题进行了详尽的说明与分析。
关键词:三相异步电动机机械特性启动制动调速异步电动机具备许多的特性,其中包括结构简单、价 格相对较低、维护方便等。
所以,在电力拖动系统中经常 能够看到异步电动机的身影。
电子技术以及交流调速技术 的不断发展和逐渐成熟,极大地优化了异步电动机的调速 技能。
到现在为止,在许多工业电气自动化领域中,异步 电动机的电力拖动都得到了广泛运用。
以三相异步电动机 的机械特性作为基本出发点,文章对电动机的启动、制动 以及调速等方面进行了分析阐述。
1三相异步电动机的机械特性三相异步电动机的机械特性简单概括就是:在电动机的 定子电压、频率还有绕组参数不变的情况下,电动机的转速 或转差率与电磁转矩之间的关系,即n=f (T)或s=f(T)转速与转差率有某种程度上的对应关系。
机械特性可以用 函数来表示,也可以用曲线来表示。
用函数表达机械特性 曲线时有三种表达形式,包括物理表达式、参数表达式以 及实用表达式。
物理表达式描述的是异步电动机电磁转矩 是如何产生的,可知是因为主磁通与转子有功电流互相作 用得以产生的电磁转矩。
参数表达式描述的是电动机和电 源参数和电磁转矩的关系。
应用这一关系式,能够很便捷 地描述参数变化对电磁转矩以及人为特性的影响。
实用表 达式简单方便,有利于记忆,常常出现在工程计算中。
三相异步电动机的机械特性包括固有机械特性和人为 机械特性。
固有机械特性指的是异步电动机在工作时达到 额定电压和额定频率时,电动机按照正确的接线方式,在 定子还有转子中没有外接电容电抗电阻时得到的机械特性 曲线。
三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下:5.1.1机械特性的物理表达式由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(),变化不大,,电磁转矩与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时(),如,减少近一半,很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为段,段为曲线段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。