三相异步电动机的机械特性(精)
- 格式:ppt
- 大小:285.00 KB
- 文档页数:11
实验报告课程名称:电机与拖动基础实验项目:三相异步电动机机械特性姓名:lmysdju一.实验目的理解三相异步电动机的机械特性,用MATLAB绘制出不同控制方法下三项异步电机的机械特性曲线。
二.实验项目1. E1/f1为常数,在不同供电频率下绘制出机械特性曲线;2. U1/f1为常数,在不同供电频率下绘制出机械特性曲线;,在不同供电频率下绘制出机械特性曲线。
三.实验内容本实验是基于MATLAB软件的,所需要的电机时参数已知的。
电机的特征如下:三相四极,定子绕组为Y接,其额定数据和毎相参数如下:1. 采用恒E1/f1控制,通过MATLAB编程,绘制出不同供电频率下三相异步电机的机械特性。
其程序如下:%Mechanical characteristic with E1/f1=Constclcclearsyms U1n Nph Poles Fe0 Nn R1 R2p X10 X20p R0 X0 Nsn Sn Zeq Z1 F1 Ns X1 X2p Xm...E1 E1n S Nrl Teml a b;U1n=380/sqrt(3);Nph=3;Poles=4;Fe0=50;Nn=1480;R1=1.03;R2p=1.02;X10=1.03;X20p=4.4;R0=7;X0=90;Nsn=120*Fe0/Poles;Sn=(Nsn-Nn)/Nsn;Zeq=(R0+j*X0)*(R2p/Sn+j*X20p)/((R0+j*X0)+(R2p/Sn+j*X20p)); Z1=R1+j*X10; E1n=abs(Zeq*U1n/(Zeq+Z1));for b=1:4if b==1F1=50;elseif b==2F1=35;elseif b==3F1=25;elseif b==4F1=10;endNs=120*F1/Poles;X1=X10*(F1/Fe0);X2p=X20p*(F1/Fe0);Xm=X0*(F1/Fe0);E1=E1n*(F1/Fe0);for a=1:2000S=a/2000;Nrl=Ns*(1-S);Teml=Nph*Poles/(4*pi)*(E1/F1)^2*F1*R2p/S/((R2p/S)^2+X2p^2);Tem(a)=Teml;Nr(a)=Nrl;plot(Teml,Nrl);hold on;endhold on;endxlabel('Torque[N.m]');ylabel('Speed[r/min]');title('Mechanical characterristic with E1/f1=const');ylim([0,1600]);xlim([0,105]);text(50,1350,'f=50Hz');text(50,900,'f=35Hz');text(50,600,'f=25Hz');text(50,150,'f=10Hz');运行结果:Mechanical characterristic with E1/f1=constSpeed[r/min]Torque[N.m]2.采用恒U1/f1控制,重新绘制出不同供电频率下三相异步电机的机械特性曲线。

三相异步电动机的机械特性
三相异步电动机的机械特性(1)转子机械特性转子是定子绕组中通过一对或几对磁极而产生旋转磁场,在转子导条轴上装有铁芯和滑环。
由于各种原因会使转子发生振动。
为了保证起动时的正常运行,要求转子机械特性曲线应与负载所需的机械特性曲线相符合。
三相异步电动机的机械特性(2)磁路机械特性当定子绕组通以直流电后,便产生感应电势,并随着转速增大而增大,同时转子也将感应出较强的交变磁场,这个磁场称为旋转磁场,它可分解成若干个正弦波,在空间形成闭合回路,并沿转轴作切割磁力线的运动。
第五章电机机械特性的测定实验一三相异步电动机在各种运行状态下的机械特性一.实验目的了解三相绕线式异步电动机在各种运行状态下的机械特性。
二.预习要点1.如何利用现有设备测定三相绕线式异步电动机的机械2.测定各种运行状态下的机械特性应注意哪些问题。
3.如何根据所测得的数据计算被试电机在各种运行状态下的机械特性。
三.实验项目1.测定三相绕线式异步电动机在电动运行状态和再生发电制功状态下机械特性。
2.测定三相绕线式异步电动机在反接制动运行状态下的机械特性。
四.实验设备及仪器1.MEL系列电机系统教学实验台主控制屏。
2.电机导轨及测速表(MEL-13、MEL-14)3.直流电压、电流、毫安表4.三相可调电阻器900Ω(MEL-03)5.三相可调电阻器900Ω(MEL-04)6.波形测试及开关板(MEL-05)五.实验方法及步骤按实验线路图5-5接线M为三相绕线式异步电动机M09,额定电压U N=220伏,Y接法;G为直流并励电动机M03(作他励接法),其U N=220伏,P N=185WR S选用三组90Ω电阻(每组为MEL-04,90Ω电阻)R1选用675Ω电阻(MEL-03中,450Ω电阻和225Ω电阻相串联)。
R f选用3000Ω电阻(电机起动箱中,磁场调节电阻)V2、A2、mA分别为直流电压、电流、毫安表,采用MEL-06或直流在主控制屏上V1、A1、W1、W2为交流、电压、电流、功率表,含在主控制屏上S1选用MEL-05中的双刀双掷开关1.测定三相绕线式异步电机电动及再发电制动机械特性仪表量程及开关、电阻的选择:(1)V2的量程为300V档,mA的量程为200mA档,A2的量程为2A档。
实验步骤:(1)接下绿色“闭合”按钮,接通三相交流电源,调节三相交流电压输出为180V(注意观察电机转向是否符合要求),并在以后的实验中保持不变。
(2)接通直流电机励磁电源,调节R f阻值使I f=95mA并保持不变。

三相异步电动机的机械特性
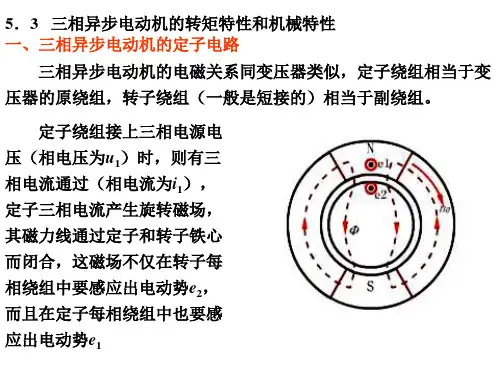
1.三相异步电动机的电磁转矩
三相异步电动机的转矩:
三相异步电动机的转矩是由旋转磁场的每极磁通Φ与转子电流I2相互作用而生成的。
它与Φ和I2 的乘积成正比,此外,它还与转子电路的功率因素cosφ2 有关。
转矩表达式:
式中,K——与电动机结构参数、电源频率有关的一个常数;
U1,U ——定子绕组相电压,电源相电压;
R2——转子每相绕组的电阻;
X20——电动机不动(n=0)时转子每相绕组的感抗。
2.三相异步电动机的固有机械特性
固有机械特性:
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中的不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性。
电动机的抱负空载转速:
额定转矩及额定转差率:S=(N1-N2)/N1
转矩-转差率特性的有用表达式,即规格化转矩-转差率特性。
3.三相异步电动机的人为机械特性
人为机械特性:
异步电动机的机械特性与电动机的参数有关,也与外加电源电压、电源频率有关,将关系式中的参数人为地加以转变而获得的特性称为异步电动机的人为机械特性。
电压U的变化对抱负空载转速no和临界转差率Sm不发生影响,但最大转矩Tmax与U2成正比,当降低定子电压时,no和Sm不变,而Tmax大大减小。
在同一转差率状况下,人为特性与固有特性的转矩之比等于电压的平方之比。
因此在绘制降低电压的人为特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘降低电压与额定电压比值的平方,即可作出人为特性曲线:
在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低。
三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下:5.1.1机械特性的物理表达式由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(),变化不大,,电磁转矩与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时(),如,减少近一半,很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为段,段为曲线段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。