三相异步电动机的机械特性
- 格式:docx
- 大小:50.76 KB
- 文档页数:4
三相绕线式异步电动机各种运行状态下的机械特性原理简述机械特性是指其转速与转矩间的关系,一般表示为。
由于三相异步电动机的机械特性呈非线性关系,所以函数表达式以转速为自变量,转矩为因变量,写为更为方便。
又因转差率s也可以用来表征转速,而且用s表示的机械特性表达式更为简洁,所以对三相异步电动机一般用来表示机械特性,同时将作为横坐标,这样和原的图形是一致的。
一、三相异步电动机机械特性的表达式三相异步电动机机械特性的表达式一般有三种:1.物理表达式其中为异步电机的转矩常数;为每极磁通;为转子电流的折算值;为转子回路的功率因数。
2.参数表达式其中。
3.实用表达式其中为最大转矩,为发生最大转矩时的转差率。
三种表达式其应用场合各有不同,一般物理表达式适用于定性分析与及间的关系,参数表达式可以分析各参数变化对电动机运行性能的影响,而实用表达式最适合用于进行机械特性的工程计算。
二、三相异步电动机的机械特性1.固有机械特性固有机械特性是指异步电动机在额定电压、额定频率下,电动机按规定方法接线,定子及转子回路中不外接电阻(电抗或电容)时所获得的机械特性,如图15-1所示。
图15-1 三相异步电动机的固有机械特性下面对机械特性上反映其特点的几个特殊点进行分析:(1)起动点:其特点是:,,起动电流;(2)额定运行点:其特点是:,,;(3)同步速点:其特点是:,,,,点是电动状态与回馈制动的转折点;(4)最大转矩点:电动状态最大转矩点,其特点是:,;回馈制动最大转矩点,其特点是:,;由公式可以看出,。
2.人为机械特性由三相异步电动机机械特性的参数表达式可见,异步电动机的电磁转矩在某一转速下的数值,是由电源电压、频率、极对数及定转子电路的电阻、电抗、、、决定的。
因此人为的改变这些参数,就可得到不同的人为机械特性。
现介绍改变某些参数时人为机械特性的变化:(1)降低电压不变,不变,因为,,,所以降低电压时,、、均减小,其人为机械特性见图15-2。


三相异步电动机的机械特性
三相异步电动机的机械特性(1)转子机械特性转子是定子绕组中通过一对或几对磁极而产生旋转磁场,在转子导条轴上装有铁芯和滑环。
由于各种原因会使转子发生振动。
为了保证起动时的正常运行,要求转子机械特性曲线应与负载所需的机械特性曲线相符合。
三相异步电动机的机械特性(2)磁路机械特性当定子绕组通以直流电后,便产生感应电势,并随着转速增大而增大,同时转子也将感应出较强的交变磁场,这个磁场称为旋转磁场,它可分解成若干个正弦波,在空间形成闭合回路,并沿转轴作切割磁力线的运动。

三相异步电动机的机械特性引言三相异步电动机是目前工业用电动机中广泛使用的一种电机,具有结构简单、成本低、效率高等优点。
本文将着重介绍三相异步电动机的机械特性,包括转速、转矩、效率等方面。
转速三相异步电动机的转速主要取决于供电电源的频率和极对数。
一般来说,三相异步电动机的额定转速为每分钟1450转或每分钟2900转,对应的供电电源频率分别为50Hz和60Hz。
除了额定转速外,三相异步电动机还有超额定转速和滑差转速。
超额定转速是指电机的转速高于额定转速,通常只能在短时间内工作,例如起动前的转速提高。
滑差转速是指电动机在空载时的转速,通常比额定转速略高一些。
转矩三相异步电动机的转矩可以分为起动转矩、额定转矩和最大转矩三种。
起动转矩是指电动机在启动时需要克服惯性负载等因素所需的转矩,通常是额定转矩的23倍。
额定转矩是指电机在额定工作条件下所需的转矩,通常为电机的额定输出功率与额定转速的乘积除以转子的转速。
最大转矩是指电机可2倍。
以承受的最大转矩,通常为额定转矩的1.5效率三相异步电动机的效率是指输出功率与输入功率的比值,通常用百分比表示。
三相异步电动机的效率通常在75%~95%之间,其中额定效率是指在额定工作条件下的效率,是电机最重要的性能指标之一。
三相异步电动机的效率取决于多种因素,包括电机本身的设计、工作条件、负载特性等。
在实际应用过程中,为了提高三相异步电动机的效率,可以采取如下措施:1.选择合适的电机型号和规格;2.优化电机的设计参数,例如提高功率因数、降低铁损和电阻损耗等;3.选择合适的工作条件,例如控制负载、降低温度等;4.定期维护和检查电机,保持电机状态良好。
三相异步电动机是工业应用最广泛的电动机之一,具有转速稳定、转矩大、效率高等优点。
本文介绍了三相异步电动机的机械特性,包括转速、转矩和效率等方面,希望对读者理解和应用三相异步电动机有所帮助。
第二节三相异步电动机的电磁转矩和机械特性三相异步电动机转轴上产生的电磁转矩是决定电动机输出的机械功率大小的一个重要因素,也是电动机的一个重要的性能指标。
一、三相异步电动机的转矩特性1、电磁转矩的物理表达式三相异步电动机的工作原理告诉我们,电磁转矩是旋转磁场与转子绕组中感应电流相互作用产生的,设旋转磁场每极的磁通量用Φ表示,它等于气隙中磁感应强度平均值与每极面积的乘积。
Φ表示了旋转磁场的强度。
设转子电流用I2表示。
根据电磁力定律,电磁转矩T em应与Φ成正比、与I2也成正比,即T em∝Φ·I2。
此外转子绕组是一个感性电路,转子电流I2滞后于感应电动势E2,它们之间的相位差角是。
考虑到电动机的电磁转矩对外做机械功,与有功功率相对应。
因此电磁转矩T em还与转子电路的功率因数cos有关,即与转子电流的有功分量I2cos(与E2同相位的电流分量)成正比。
总结以上分析,可列出异步电动机的电磁转矩方程式中KT是一个与电动机本身结构有关的系数。
该公式是分析异步电动机转矩特性的重要依据。
2、转矩特性电磁转矩与转差率之间的关系T em=(S)称为电动机的转矩特性。
可以推得式中KT’、转子电阻R2、转子不动时的感抗X20都是常数,且X20远大于R2。
由于上式用电机定、转子绕组中的电阻、电抗等参数反映电磁转矩T em和转差率S之间的关系,所以上式又称之为电磁转矩的参数表达式。
由转矩的表达式(4-5)可知,转差率一定时,电磁转矩与外加电压的平方成正比,即T em∝U12。
因此,电源电压有效值的微小变动,将会引起转矩的很大变化。
当电源电压U1为定值时,电磁转矩T em是转差率S的单值函数。
图4-13画出了异步电动机的转矩特性曲线。
二、三相异步电动机的机械特性当电源电压U1和转子电路参数为定值时,转速n和电磁转矩T的关系n=f(T)称为三相异步电动机的机械特性。
机械特性曲线可直接从转矩特性曲线变换获得。
将图4-15中的转矩特性曲线顺时针转动90°,并将s换成n就可以得到三相异步电动机的机械特性曲线,如图4-16所示。
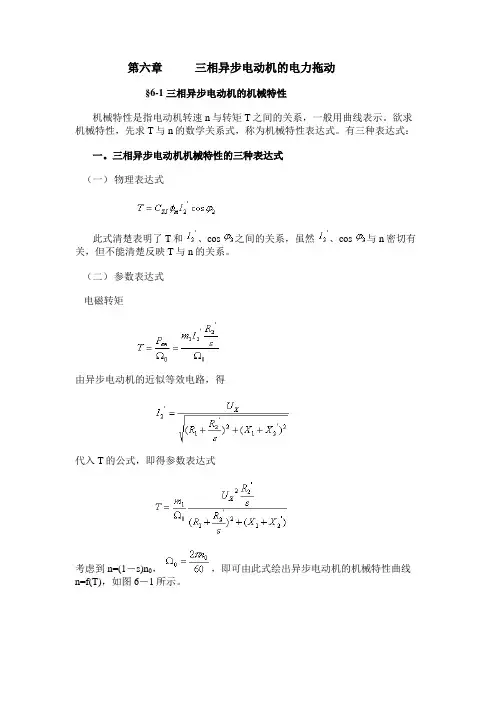
第六章三相异步电动机的电力拖动§6-1 三相异步电动机的机械特性机械特性是指电动机转速n与转矩T之间的关系,一般用曲线表示。
欲求机械特性,先求T与n的数学关系式,称为机械特性表达式。
有三种表达式:一。
三相异步电动机机械特性的三种表达式(一)物理表达式此式清楚表明了T和、cos之间的关系,虽然、cos与n密切有关,但不能清楚反映T与n的关系。
(二)参数表达式电磁转矩由异步电动机的近似等效电路,得代入T的公式,即得参数表达式考虑到n=(1-s)n0,,即可由此式绘出异步电动机的机械特性曲线n=f(T),如图6-1所示。
机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m。
将表达式对s求导,并令,可求出产生最大转矩T m时的转差率S m图6-1机械特性曲线S m称为临界转差率。
代入T的公式则可得T m的公式式中正号对应于电动机状态,负号适用于发电机状态。
一般,故可得近似公式可见:(1)当电动机参数和电源频率不变时,T m ,而S m与U X无关;(2)当电源电压和频率不变时,S m和T m近似与(X1+)成反比;(3)增大转子回路电阻,只能使S m相应增大,而T m保持不变。
最大转矩T m与额定转矩T N之比称为过载倍数,也称过载能力,用K T表示:一般异步电动机K T=1.8~3.0。
对于起重冶金机械用的电动机,可达3.5。
异步电动机起动时,n=0,s=1,代入参数表达式,可得起动转矩的公式由此式可知,对绕线式异步电动机,转子回路串接适当大小的附加电阻,能加大起动转矩T st,从而改善起动性能。
对于鼠笼式电动机,不能用转子串电阻的方法改善起动转矩,在设计电动机时就要根据不同负载的起动要求来考虑起动转矩的大小。
起动转矩T st与额定转矩T N之比,称为起动转矩倍数K st:K st=一般电动机K st=1.0~2.0,对于起重冶金机械用的电动机为2.8~4.0。
(三)实用表达式参数表达式在理论分析时很有用,但定、转子参数在产品目录中找不到,使用起来不方便。
三相异步电动机的机械特性
1.三相异步电动机的电磁转矩
三相异步电动机的转矩:
三相异步电动机的转矩是由旋转磁场的每极磁通Φ与转子电流I2相互作用而生成的。
它与Φ和I2 的乘积成正比,此外,它还与转子电路的功率因素cosφ2 有关。
转矩表达式:
式中,K——与电动机结构参数、电源频率有关的一个常数;
U1,U ——定子绕组相电压,电源相电压;
R2——转子每相绕组的电阻;
X20——电动机不动(n=0)时转子每相绕组的感抗。
2.三相异步电动机的固有机械特性
固有机械特性:
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中的不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性。
电动机的抱负空载转速:
额定转矩及额定转差率:S=(N1-N2)/N1
转矩-转差率特性的有用表达式,即规格化转矩-转差率特性。
3.三相异步电动机的人为机械特性
人为机械特性:
异步电动机的机械特性与电动机的参数有关,也与外加电源电压、电源频率有关,将关系式中的参数人为地加以转变而获得的特性称为异步电动机的人为机械特性。
电压U的变化对抱负空载转速no和临界转差率Sm不发生影响,但最大转矩Tmax与U2成正比,当降低定子电压时,no和Sm不变,而Tmax大大减小。
在同一转差率状况下,人为特性与固有特性的转矩之比等于电压的平方之比。
因此在绘制降低电压的人为特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘降低电压与额定电压比值的平方,即可作出人为特性曲线:
在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低。
三相异步电动机的机械特性
(一)机械特性方程
1)物理表达式:T=CTФmI2’ cosф2 (T是电磁作用的结果)
2)参数表达式:
3) 工程表达式:
——外施电源电压;
——电源频率;
——电机定子绕组参数;
——电机转子绕组参数。
(二)固有机械特性曲线
1.形状(根据工程表达式来说明)
AB段(s较大):为双曲线,T与S成反比。
BO段(s很小):为直线,T与S 成正比。
2.起动点A,n=0,S=1,
起动转矩倍数KT=TS/TN 一般取0.8~1.8
3.临界点B
临界转差率只与转子电阻有关. 取0.1~0.2
最大转矩与电源电压UI2有关。
过载能力λ=Tm/TN 取1.6~2.2
4.同步点O
n=n1 T=0 (理想的空载转速,旋转磁场的转速 )
5.额定点C
0< SN <Sm取0.02~0.06
在该点附近有TN=9550PN/nN
(三)人为机械特性
1、降低定子电压的人为机械特性——“变瘦”
当定子电压U1 降低时,电磁转矩T与U1 的平方成正比,故同步转速不变,Sm不变,最大转矩Tm 和起动转矩TS 随电压平方降低。
其特性曲线(红色)所示。
2、转子串电阻的人为机械特性——“变软”
当转子回路串电阻时,同步点不变,Sm与转子电阻成正比,转速随电阻增加而减小,最大转矩Tm保持不变,在一定范围内起动转矩有所增加,其特性曲线(红色)所示
3、降低定子电压频率的人为机械特性——“变小”
降低定子电压频率时,同步转速随之下降,从而使得电机转速下降,但特性的硬度基本保持不变。
电动机在工作时要求主磁通保持不变,因此在降低频率的同时,定子电压也要随之降低。