第六章 二自由度系统的振动
- 格式:ppt
- 大小:1.43 MB
- 文档页数:36
第六章 多自由度系统固有频率和主振型的两种近似解法从多自由度问题的精确解的求解过程可知,求振系的固有频率及主振型是一项必不可少的过程,当自由度较少时,可直接求固有频率及主振型,但当自由度较多时,关于固有频率的求解就很复杂,如一个16自由度的振动问题,仅为展开频率方程的行列式,就需要进行720次计算,当然这些计算可借助计算机解决,但关于固有频率的近似计算及其计算思想,在实际应用及理论研究中仍具有一定的意义。
本章主要介绍求固有频率的两种方法:矩阵迭代法及传递矩阵法。
6-1矩阵迭代法矩阵迭代法适合于自由度较多的复杂系统,该法可以同时计算出系统的固有频率和相应的主振型,当自由度很多,但只要计算出低阶的几个频率时,矩阵迭代法很为适用,其大量的计算可由计算机完成。
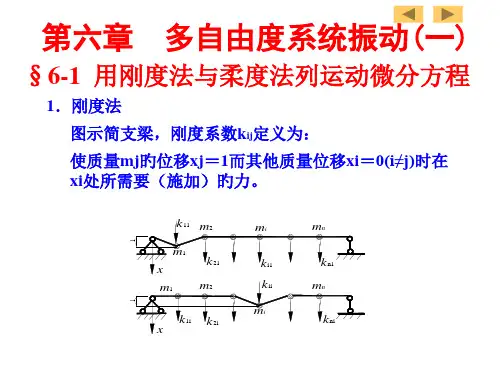
在第五章已经介绍过,多自由度无阻尼系统的振动微分方程有两种形式,一种是用刚度矩阵建立的,其固有频率和主振型可由下式求,[]{}[]{}{}02=-A M p A K或写成[]{}[]{}A M p A K 2= (6-1)另一种是用柔度矩阵建立的,其固有频率和主振型可由下式求出{}[][]{}{}012=-A M R A p 或写成{}[][]{}A M R A p=21(6-2) 用[]1-M 前乘(6-1)式,得[]1-M []{}{}A p A K 2= (6-3)方程(6-2)(6-3)可写成如下统一的形式[]{}{}A A D λ= (6-4)(6-4)式称为特征值问题的标准形式,即矩阵迭代法的基本迭代公式。
式中[]D 称为动力矩阵,λ则是矩阵[]D 的特征值,当[]D 是按刚度矩阵形成时,即[][][]K M D 1-=,则λ表示固有频率的平方,λ=p 2,而当[]D 是按柔度矩阵形成时,即[][][]K R D =,则λ表示固有频率的平方的倒数,λ=1/p 2。
显然,任一阶固有频率和主振型都是(6-4)式的精确解。
下面介绍从(6-4)式出发进行迭代的基本过程:1) 某个经过基准化了的初始迭代向量{}1A (所谓基准化就是选取迭代向量的某个分量为基准值1),现选取{}1A ,使其第一个元素A 1,1为基准值1,并作[]{}1AD =运算,运算得到一个新的列阵{}1B ,再将{}1B 基准化,即将新的列阵{}1B 中的各元素均除以B 1,1,可得[]{}{}{}21,111A B B A D ==2) 与{}2A ,如果{}1A ≠{}2A ,则重复上述步骤,以[]D 乘{}2A ,得[]{}{}{}32,122A B B A D ==3) 比{}2A 与{}3A ,如果{}3A ≠{}2A ,则继续重复上述步骤,以[]D 乘{}3A ,…,直到第k 次迭代[]{}{}{}1,1+==k k k k A B B A D ,当式中{}k A ={}1+k A 时停止,这时,特征值1λ=B 1,k ,而相应的特征向量就等于{}k A 。
第六章 两自由度系统的振动§6.1 概述前一章介绍了单自由度系统的振动,它是振动理论的基础,有广泛的应用价值。
但在实际工程问题中,经常会遇到一些不能简化为单自由度系统的振动问题。
因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究方法有质的不同。
但从两自由度系统到多自由度系统的振动,无论从模型的简化、振动微分方程的建立和求解的一般方法,以及系统响应表现出来的振动特性等等,却没有什么本质上的区别,而主要是量上的差别。
因此研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度系统的振动系统。
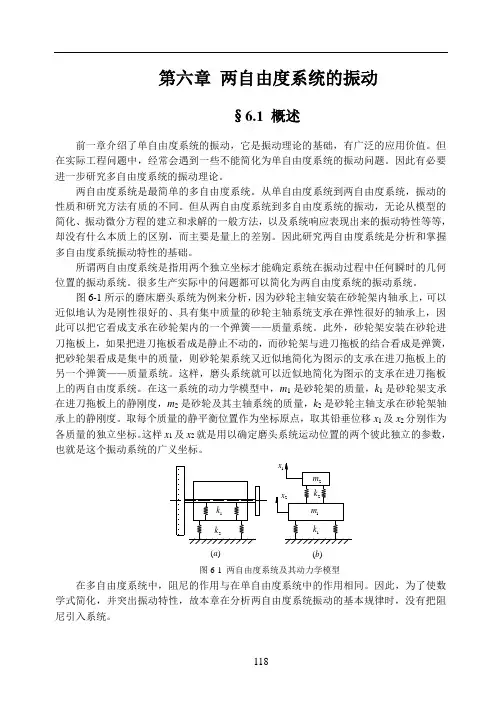
图6-1所示的磨床磨头系统为例来分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的、具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而砂轮架与进刀拖板的结合看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地简化为图示的支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m 1是砂轮架的质量,k 1是砂轮架支承在进刀拖板上的静刚度,m 2是砂轮及其主轴系统的质量,k 2是砂轮主轴支承在砂轮架轴承上的静刚度。
取每个质量的静平衡位置作为坐标原点,取其铅垂位移x 1及x 2分别作为各质量的独立坐标。
这样x 1及x 2就是用以确定磨头系统运动位置的两个彼此独立的参数,也就是这个振动系统的广义坐标。
1k 2k)(a )(b图6-1 两自由度系统及其动力学模型在多自由度系统中,阻尼的作用与在单自由度系统中的作用相同。
第六章 结构振动特征值问题的矩阵摄动法§6.1 概述工程振动问题中经常遇到结构有小改动的情形,例如结构的制造误差、结构的小修改设计、对结构参数改变进行灵敏度分析等。
这些情况都有一个共同的特点,就是结构的参数仅发生很小的变化。
结构参数的小变化所引起的结构振动特性变化问题,对工程结构优化设计有重要意义。
经典的方法是每修改一次方案就需要求解一次结构的固有特性,即求解广义特征值问题。
这对于大型结构的振动分析,是非常麻烦的。
我们希望能找到一种能够利用修改前结构的固有特性信息,且计算量小的方法,来解决上述问题。
矩阵摄动法就是这种结构特征值重分析和灵敏度快速分析的计算方法。
§6.2 孤立特征值的摄动法对离散系统特征值问题,假定已经得到了其特征对的解:(6-1)分别为参数未变化的原结构刚度矩阵和质量矩阵,第个特征值,为第阶固有频率,为第阶特征向量(固有模态)。
结构参数的变化或修改设计一般通过刚度矩阵和质量矩阵的改变反映出来。
即(6-2)(6-3)称为小参数。
先看是单根的情形。
上标代表第个根,下标代表参数未变化的原结构。
从物理意义上知道,绝大多数情况下,质量阵和刚度阵只有小变化时,特征值和特征向量也只有小量变化,根据摄动理论,特征值和特征向量按小参数展开为:(6-4)代入方程(6-1),略去以上的项,比较同次幂的系数,得到: }]{[}]{[)(00)(0)(00i i i u M u K λ=][],[00M K i 2)(0)(0)(i i ωλ=)(0i ωi }{)(0i u i ][][][10M M M ε+=][][][10K K K ε+=ε)(i 0λ)(i i 0)(ε+++=+++=)(22)(1)(0)()(22)(1)(0)(}{}{}{}{i i i i i i i i u u u u λεελλλεε)(2εO ε(6-5)(6-6)(6-7)、、、分别是特征值与特征向量的第一阶摄动和第二阶摄动。

第一章:00;(1)工序:一个或一组工人,在一个工作地对同一个或同时对几个工件所连续完成的工艺过程,称为工序。
工序是组成工艺过程的基本单元。
(2)工位:为了完成一定的工序部分,一次装夹工件后,工件(或装配单元)与夹具或设备的可动部分一起相对刀具或设备的固定部分所占据的每一个位置称为工位。
(3)工步:在加工表面(或装配时的连续表面)和加工(或装配)工具不变的情况下所连续完成的工序,称为工步。
(4)生产纲领:生产纲领是指企业在计划期内应当生产的产品产量和进度计划。
计划期常定位一年,因此生产纲领有时也称为年产量。
(5)生产类型:生产类型对工厂的生产过程和生产组织起决定性的作用。
生产类型是指企业(或车间、班组、工作地)生产专业化程度的分类,一般分为大量生产、成批生产和单件生产三种类型。
根据批量的大小,成批生产又可分为小批生产、中批生产和大批生产。
01; 制定机械加工工艺规程的步骤:(1)研究产品的装配图和零件图,进行工艺分析;(2)确定生产类型;(3)熟悉或确定毛坯;(4)拟定工艺路线;(5)确定各工序的加工余量,计算工序尺寸及其公差;(6)选择各工序使用的机床设备及工艺装备;(7)确定切削用量及时间定额;(8)填写工艺文件02;基准的概念和分类(1) 基准是用来确定生产对象上几何要素间的几何关系所依据的那些点、线、面。
基准根据其功用的不同可分为设计基准和工艺基准。
(2)工艺基准是在工艺过程中所采用的基准。
工艺基准按它的用途不同又可分为测量基准、装配基准、工序基准和定位基准。
03;定位基准的选择原则选择定位基准时,总是先考虑选择怎样的精基准把各个主要表面加工出来,然后再考虑选择怎样的粗基准把作为精基准的表面加工出来,即先考虑精基准的选择,后考虑粗基准的选择。
精基准的选择原则:(1)基准重合原则;(2)基准统一原则;(3)互为基准原则;(4)自为基准原则。
粗基准的选择原则:(1)若工件必须首先保证某重要表面的加工余量均匀,应选择该表面为粗基准;(2)在没有要求保证重要表面加工余量均匀的情况下,若零件上每个表面都要加工,则应该以加工余量最小的表面作为粗基准,以避免该表面在加工时因余量不足而留下部分毛坯面,造成工件废品;(3)在与上一项相容的前提条件下,若零件上有些表面无须加工,则应以不加工表面中与加工表面的位置精度要求较高的表面为粗基准,以达到壁厚均匀、外形对称等要求;(4)选用粗基准的表面应尽量平整光洁,不应有飞边、浇口、冒口及其他缺陷,这样可减小定位误差,并能保证零件加紧可靠;(5)粗基准一般只使用一次。
《机械动力学》教学大纲大纲说明课程代码:0803532011总学时:40学时(讲课32学时,实验8学时)总学分: 2学分课程类别:专业选修课适用专业:机械设计制造及其自动化预修要求:工程力学课程的性质、目的、任务:机械动力学是机械设计制造及自动化专业的主干技术基础课之一。
本课程主要讨论机械振动的基本理论、建模方法与分析计算方法。
旨在培养学生分析、解决一般机械系统和工程结构振动的能力。
通过本课程的学习,要求学生掌握机械振动的基本理论,并能应用基本理论分析和解决工程振动问题。
教学基本方式:本课程以课堂讲授为主,并充分重视实验教学。
在课堂教学中,充分结合大型工程应用软件(Matlab/Simulink)对振动理论与工程问题进行仿真与分析,帮助学生掌握机械振动基本理论、建模方法和分析计算方法;在实验教学中,重点结合动态测试与分析技术,搭建振动测量与抑制系统,对振动系统进行动态测试与分析,培养学生解决工程振动问题的能力。
大纲的使用说明:有关振动的抑制与利用部分的内容可穿插在其它章节中进行教学。
大纲正文第一章绪论学时:2学时基本要求:了解机械动力学的研究内容、工程中的机械振动问题,掌握振动系统概念与对应的三种基本课题,理解机械动力学的研究方法。
重点:振动系统概念与对应的三种基本课题难点:机械动力学研究方法的理解教学内容:第一节机械动力学的研究内容第二节工程中的机械振动问题第三节振动系统概念与振动问题分类第四节机械动力学的研究方法第五节课程内容体系第二章机械振动基础学时:4学时基本要求:了解振动的分类、线性振动系统的叠加原理与振动的频谱;掌握简谐振动的表示方法及其特征,了解简谐振动幅值和频率的测量方法,掌握机械系统的动力学模型。
重点:简谐振动及其特征、机械振动系统的三个要素及其动力学模型难点:振动的频谱教学内容:第一节振动的分类第二节简谐振动及其特征第三节线性振动系统的叠加原理第四节振动的频谱第五节机械振动系统的动力学模型第三章单自由度系统的自由振动学时:6学时基本要求:理解机械振动系统的简化与模型建立方法,掌握单自由度系统的运动微分方程及其建立方法、无阻尼自由振动与阻尼自由振动的特征及其模型参数的测量方法。