拉氏变换复数位移定理 -回复
- 格式:doc
- 大小:11.53 KB
- 文档页数:3


控制原理补充讲义——拉氏变换拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在控制系统分析中,对系统进行分析所需的输入信号常可化简成一个或几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
注意:六大性质一定要记住1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见下表:拉氏变换对照表 序号 F(s) f(t) 序号 F(s) f(t)11 1121(t) 123t13414511+Ts Tte T-1 156)(1a s s +ate --1167)1(1+Ts sTt e--117)1sin(122ϕξωξωξω----t e n t nn8189191020三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s),则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有,其中,当t<0时,f(t)=0,f(t-a)表示f(t)延迟时间a.证明:,令t-a=τ,则有上式=例:求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)是由正向使的f(t)值。
拉普拉斯变换重要意义:采用拉普拉斯变换,可以将线性微分方程转化为复变量S 的代数方程,从而非常容易地求解线性微分方程,同时得到解的瞬态分量和稳态分量。
例如:求解如下线性微分方程0)0()0( )(6)(5)(222=='=+-y y te t y dtt dy dtt y d t解:1)通解 由2 3 0652===+-r r r r 可得:t t e c e c t y 22311)(+= 2)设特解为:t e b t b t t y 2102)()(+= 带入原方程可得:1,2/12200100-=-==-+-b b t b b t b3)原方程解为:tt t t et te e c e c t y 222223121)(--+=4)带入初始值可得:1 121-==c c tt t t et te e e t y 2222321)(---=将方程ttet y dtt dy dtt y d 222)(6)(5)(=+- 两边取拉氏变换可得:3222)2(1)2(12131)( )2(1)(6)(5)(-------=-=+-s s s s s Y s s Y s sY s Y s再求逆变换可得:tt t t et te e e t y 2222321)(---=一、复数和复变函数 1)复数的定义复数是由一对有序实数(x,y )构成,表示为:jy x z +=,共轭复数:jy x z -=其中:1 )Im( )Re(-===j Z y Z x 注意:两个复数相等,则其实部和虚部分别相等。
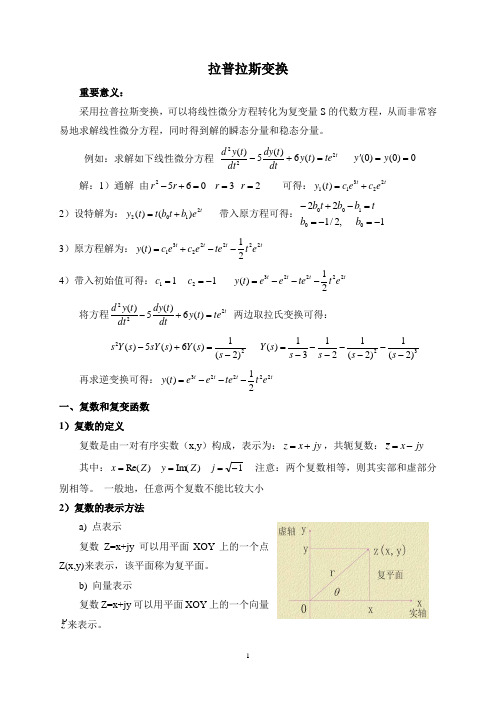
一般地,任意两个复数不能比较大小 2)复数的表示方法a) 点表示复数 Z=x+jy 可以用平面XOY 上的一个点Z(x,y)来表示,该平面称为复平面。
b) 向量表示复数Z=x+jy 可以用平面XOY 上的一个向量z来表示。
22y x r z z +===称为复数的模,向量z与x 轴正方向的夹角θ称为复数的幅角。



第2+章 拉普拉斯变换的数学方法拉普拉斯变换简称拉氏变换,是分析研究线性动态系统的有力数学工具。
通过拉氏变换将时域的微分方程变换为复数域的代数方程,这不仅运算方便,使系统的分析大为简化,而且在经典控制论范畴,直接在频域中研究系统的动态特性,对系统进行分析、综合和校正,具有很广泛的实际意义。
2-1 复数和复变函数1.复数的概念复数,ωσj s +=其中σ、ω均为实数,分别称为S 的实部和虚部,记做Re()s σ=,)Im(s =ωj =虚部分别相等,一个复数为零,它的实部和虚部均必须为零。
2.复数的表示方法:表达复数的直角坐标系平面称为复平面或S 平面。
(1)点表示法(2)向量表示法复数S 用从原点指向点(ωσ,)的向量来表示。
向量的长度称为复数S 的模或绝对值。
22ωσ+==r s向量与σ轴(横轴)的夹角θ称为复数的幅角,即σωθarctan =。
(3)三角表示法:由上图可看出:cos r σθ=⋅,θωsin ⋅=r 因此复数的三角表示法为:(cos sin )s r j θθ=+(4)指数表示法:利用欧拉公式:cos sin j e j θθθ=+,复数S 也可用指数表示为:j s r e θ=⋅3.复变函数、极点与零点的概念以复数ωσj s +=为自变量,按某一确定法则构成的函数G(s)称为复变函数,G(s)可写成:()G s u jv =+,在线性控制系统中,通常遇到的复变函数G(s)是S 的一个给定值,G(s)就唯一被确定。
若有复变函数 1212()()()()()()()m n k s z s z s z G s s s p s p s p ---=---当12,m s z z z =时,()0G s =,称12,z z ,·,m Z 为G(s)的零点; 当120,,n s p p p =时,()G s =∞,称120,,p p ,·,m P 为G(s)的极点。
2-2 拉氏变换与拉氏反变换的定义一、拉氏变换设有时间函数()f t ,0t ≥,则()f t 的拉氏变换记做[]()L f t 或()F s ,并定义为:[]0()()()st L f t F s f t e dt ∞-==⋅⎰ 式(2—1) 式中s 为复数,称()f t 为原函数,()F s 为象函数。
拉氏变换复数位移定理-回复
拉氏变换是一种重要的数学工具,广泛应用于信号处理、控制系统分析、电路分析等领域。
在拉氏变换中,有一个重要的定理被称为拉氏变换复数位移定理。
拉氏变换复数位移定理是指函数在复平面上的位移对其拉氏变换的影响。
具体而言,如果一个函数在时域上进行了复数位移,那么在频域上,其拉氏变换会发生相应的复数尺度的压缩或拉伸。
要理解拉氏变换复数位移定理,我们首先需要了解拉氏变换的基本概念。
拉氏变换是指将一个在时域上的函数转换为在频域上的函数。
拉氏变换的数学表达式为:
F(s) = L[f(t)] = ∫[0,∞] f(t)e^(-st) dt
其中,F(s)表示拉氏变换后的函数,f(t)表示原始函数,s为复数变量。
通过对原始函数进行积分,利用指数衰减的特性,将函数从时域转换到频域。
现在,我们来讨论拉氏变换复数位移定理。
拉氏变换复数位移定理是指,对于一个函数f(t),如果它在时域上发生了复数位移t0,那么在频域上,其拉氏变换会发生尺度的压缩或拉伸,具体的变换关系可以通过如下公式描述:
L[f(t - t0)] = e^(-st0)F(s)
这里,L[f(t - t0)]表示对函数f(t)进行复数位移t0后的拉氏变换;F(s)表示函数f(t)的拉氏变换;e^(-st0)表示复数位移t0产生的衰减因子。
应用拉氏变换复数位移定理可以得到以下结论:
1. 对于函数f(t - t0)的拉氏变换,在频域上会出现以e^(-st0)为因子的尺度压缩或拉伸。
如果t0大于零,那么函数在时域上发生了右移,对应的,在频域上会发生左压缩,即频率增大。
反之,如果t0小于零,函数在时域上发生了左移,对应的,在频域上会发生右拉伸,即频率减小。
2. 拉氏变换复数位移定理适用于时域上存在函数位移的情况,不仅限于实数位移,还包括复数位移。
复数位移可以看作实数位移在复平面上的推广,具有更广泛的适用性。
3. 拉氏变换复数位移定理与拉氏变换的线性性质结合起来,可以方便地分析和求解各种复杂的信号和系统。
现在,我们通过一个具体的例子来说明拉氏变换复数位移定理的应用。
假设我们有一个信号f(t) = e^(-at),其中a为实数。
我们希望将该信号在时
域上进行复数位移t0,也就是得到信号f(t - t0)的拉氏变换。
首先,对信号f(t)进行拉氏变换,得到F(s) = 1/(s + a)。
然后,应用拉氏变换复数位移定理,我们可以得到信号f(t - t0)的拉氏变换:
L[f(t - t0)] = e^(-st0)F(s) = e^(-st0)/ (s + a)
通过拉氏变换复数位移定理,我们可以清晰地看到,信号在时域上的复数位移会导致频域上的尺度压缩或拉伸。
如果t0大于零,会使频率增大;
如果t0小于零,会使频率减小。
这有助于我们对信号进行频域分析和系
统设计。
拉氏变换复数位移定理是拉氏变换的重要性质之一,广泛应用于信号处理、控制系统分析、电路分析等领域。
通过灵活运用复数位移定理,我们可以更好地理解和分析信号和系统在时域和频域上的相互转换,并应用于实际问题的求解。