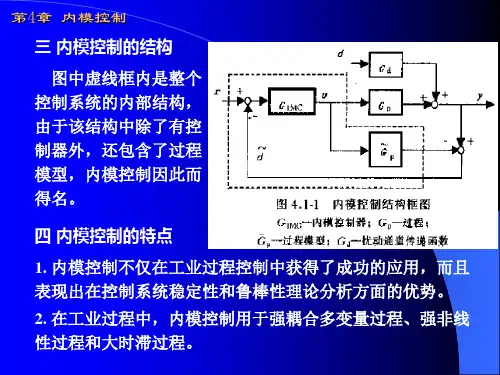
第4章 内模控制
- 格式:ppt
- 大小:1001.50 KB
- 文档页数:30

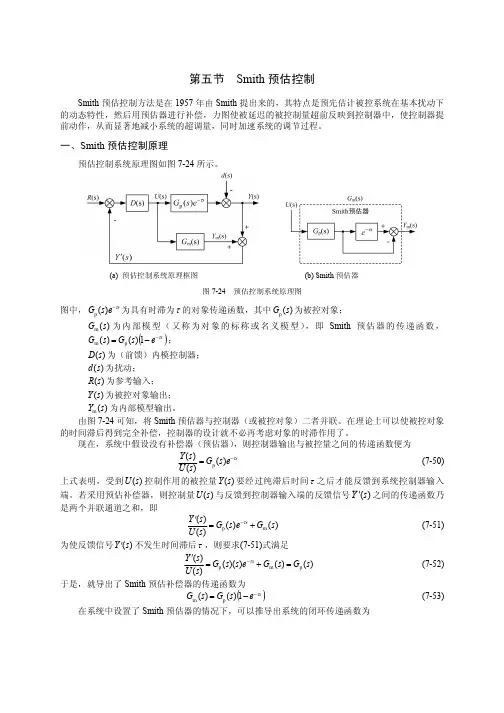
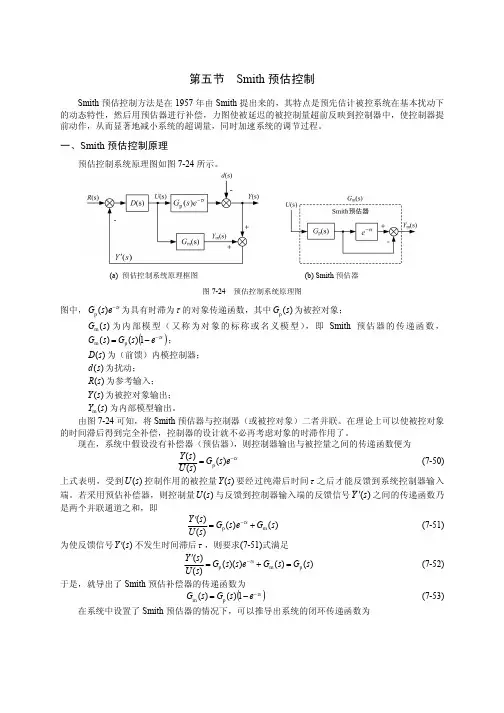
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
第一章测试1.广义对象包括()。
A:被控对象B:检测元件C:执行器D:控制器答案:ABC2.先进控制有()。
A:时滞补偿B:故障诊断C:预测控制D:解耦控制答案:ABCD3.过程控制系统中,代替人眼睛的是()。
A:执行器B:控制器C:检测装置D:被控对象答案:C4.控制系统组成中具有大脑功能的是()。
A:控制装置B:检测装置C:执行机构D:被控对象答案:A5.控制目标中不需要考虑环保因素。
A:对B:错答案:B6.随动控制系统的设定值是随时间变化的。
A:对B:错答案:A第二章测试1.被控对象的动态特性是描述被控对象输入输出关系动态特征的。
A:错B:对答案:B2.稳态指的是被控量不再随时间变化时,系统处于平衡状态。
A:对B:错答案:A3.误差绝对值积分(IAE)准则可避免正负积分面积相消现象。
A:对B:错答案:A4.灰箱模型是基于过程动态学的机理建模。
A:对B:错答案:B5.调节通道对象特性的T0小对控制系统有利。
A:错B:对答案:B6.比例积分作用为系统增加了一个开环零点,使系统相角超前,增加了稳定性。
A:错B:对答案:B7.调节系统在纯比作用下已整定好,加入积分作用后,为保证原稳定度,此时应将比例度()A:减小B:不变C:增大D:先增大后减小答案:C8.对于气动执行机构,当信号压力增加,推杆下移的,称该气动执行机构为A:可调式B:反作用式C:正作用式D:移动式答案:C9.在控制系统中,工艺变量需要控制的生产过程、设备或机械等,称为()A:反馈B:控制器C:被控过程D:设定值答案:C10.下面对过程的控制质量没有影响的是()A:扰动通道放大倍数B:扰动通道时间常数C:控制通道放大倍数D:扰动通道纯滞后时间答案:D11.过渡过程品质指标中,余差表示()A:新稳态值与给定值之差B:测量值与给定值之差C:超调量与给定值之差D:调节参数与被调参数之差答案:A12.下列哪个参数不是描述对象特性的参数()A:tB:TC:KD:τ答案:A13.受控制器的操纵,使被控变量保持在设定值的物理量是()A:操纵变量B:被控对象C:设定值D:测量值答案:A14.在阶跃扰动作用下,过程控制系统的过渡过程出现的形式如下,()是一种稳定控制系统A:非振荡发散过程B:衰减振荡过程C:发散振荡过程D:等幅振荡过程答案:B15.以下哪个传递函数可以表示积分环节()A:TsB:KC:K/(Ts)D:K/(Ts+1)答案:C16.PID参数整定方法有()A:响应曲线法B:临界比例度法C:继电器型PID自整定法D:经验法答案:ABCD第三章测试1.下列哪种不属于复杂控制系统?A:流量控制系统B:前馈控制系统C:串级控制系统D:解耦控制系统答案:A2.串级控制对所有的干扰都有很强的克服能力A:对B:错答案:B3.串级控制副参数的选择需要注意的问题有()?A:副参数必须可测B:调节阀与副参数之间具有因果关系C:尽可能将带有非线性或时变特性的环节包含于副回路中D:副参数的选择应使副对象的时间常数比主对象的时间常数小答案:ABCD4.串级控制多用于()场合?A:用于所有的控制场合;B:用于时滞较大的对象;C:用于对象具有较大的非线性特性,且负荷变化较大;D:用于克服变化剧烈和幅值大的干扰;答案:BCD5.均匀控制有()两种形式?A:前馈均匀控制B:单回路均匀控制C:串级均匀控制D:比值均匀控制答案:BC6.前馈控制的基本原理是()?A:可变性原理B:等价原理C:不变性原理D:抗干扰原理答案:C7.动态前馈的效果一定比静态前馈的效果好。
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。