基于内模控制的PID控制系统的研究与应用
- 格式:pdf
- 大小:2.25 MB
- 文档页数:72
基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
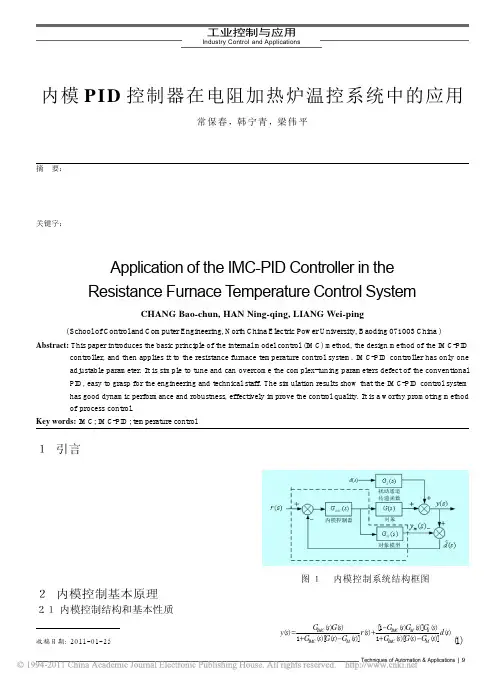
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
基于闭环辨识的鲁棒内模PID优化整定及应用的开题报告1. 研究的背景和意义PID控制是一种常见的自动控制方法,具有简单易用、可靠性高等优点,在各领域得到广泛应用。
然而,PID控制器的调整需要根据具体应用场景的特点来进行,这使得传统的PID控制往往难以满足复杂系统的高性能控制要求。
因此,如何对PID控制器进行精准调整,以实现系统动态响应性能和鲁棒性能的平衡,一直是控制领域的研究热点之一。
近年来,基于闭环辨识的鲁棒内模PID控制方法成为其中的一个重要研究方向。
该方法通过在控制器内部嵌入一个模型来加强控制器的鲁棒性能,同时利用闭环辨识技术对系统参数进行估计和补偿,使得控制器在动态性能和鲁棒性能上达到一个较好的平衡。
因此,对该方法进行深入研究,实现其在实际控制系统中的应用具有重要的理论意义和工程应用价值。
2. 研究的内容和思路本文将从以下几个方面开展研究:(1)闭环辨识技术的研究:对现有的闭环辨识方法进行综合分析和比较,确定适合本文研究的闭环辨识方法,并进行仿真验证。
(2)内模控制器的设计:在闭环辨识的基础上,设计内模控制器的结构和参数,并进行仿真和实验验证。
(3)鲁棒性能的分析和优化:分析内模控制器的鲁棒性能,并提出相应的优化方法,在平衡动态性能和鲁棒性能的基础上实现内模PID控制器的优化整定。
(4)应用于实际系统的验证:将所设计的内模PID控制器应用于实际系统中,对其控制性能进行实验验证,并与常用的PID控制器进行比较。
3. 研究的预期成果本文将实现基于闭环辨识的鲁棒内模PID控制器在实际控制系统中的应用,达到以下预期成果:(1)提出一种具有较好鲁棒性能和动态响应性能平衡的内模PID控制器设计方法,为实际控制系统的设计提供参考和借鉴。
(2)分析和验证内模PID控制器的鲁棒性能,并推导相应的鲁棒性能分析公式和优化方法,为内模PID控制器的进一步研究提供理论基础。
(3)通过对实际系统的控制实验验证,证明所设计的内模PID控制器在控制性能上具有优异的表现,为其在实际应用中推广应用提供参考。

内模 PID控制污水 PH的设计与应用Apply and design on PH control of sewage by IMC PID1.内容摘要面对国内用水紧张以及水污染严重的现状,采取有效措施对污水进行处理已经成为亟待解决的难题。
污水处理涉及到多个复杂控制过程,PH值中和反应是其中非常重要的过程之一,PH值对其它出水指标有着重要影响,它的稳定控制将直接影响污水处理整个过程是否达标。
为此,报告中提出了PH值中和过程的内模PID的控制策略。
由于污水处理现场中和反应过程中,PH值的控制具有强非线性、大滞后性、不确定性以及鲁棒性差的特点,本文针对以往单闭环PID对PH值的控制品质存在不足,提出将内模控制策略应用在污水处理PH值中和过程,设计内模PID控制器来稳定调节PH值。
为了验证所设计控制器的可行性,利用软件仿真与实验,与常规的控制方式从多个方面进行分析对比,内模PID控制能够明显的改善被控对象的目标值跟踪特性,提高抑制干扰能力,系统的动态特性可以很好的满足。
即使发生模型失配,也能实现很好的控制。
并且能够减少参数调整的个数,结构设计上也算简单。
利用软件进行仿真与实验,结果表明,该方法可以更好的改善控制系统的性能。
1.正文1.内模PID算法1.内模控制的原理上世纪八十年代,Garcia和Morari两位学者经过长时间的研究复杂对象的控制过程,全面分析多变量、非线性、时变的对象模型,结合史密斯预估计控制策略,系统的向世人阐述了一种全新的控制方法,这就是内模控制方法。
依据被控对象的数学模型, 经过简单有效的设计步骤,就可以设计出针对实际被控对象的内模控制器,用该控制器对被控对象进行控制,可以提高系统动态变化的跟踪能力,获得良好的控制效果,实用性也特别强,同时对外界的强干扰也有很好的抑制效果。
虽然PID就能解决自动化生产中很多的控制问题,但常规的PID控制很难有效的控制具有非线性、大滞后性、多变量耦合的复杂系统。
论文基于内模控制的PID在过程控制中的应用研究毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺学号06110341姓名王大林指导教师陈夕松起讫日期2014.1---2014.5设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
基于内模控制的PID 控制器在大时滞过程中的应用研究陶睿,肖术骏,王秀,朱学峰(华南理工大学自动化科学与工程学院,广州,510640)摘要:基于内模控制的PID 控制器,只有一个可调参数,且该参数直接与系统的闭环响应速度和回路的鲁棒性有关,克服了常规PID 控制参数整定复杂的缺点,易于为工程技术人员所掌握。
城市供水出水浊度过程是一个大惯性、大时滞、非线性、时变以及随机干扰多的难控对象。
而把IMC-PID 控制器应用在该对象上,仿真结果表明可以取得较理想的控制效果。
关键字:浊度控制; 大时滞过程; 内模控制; PID 控制; 中图分类号:TP273The Study on PID Controller Based on Internal Model Control in the Applications of LargeTime Delay SystemTAO Rui, XIAO Shujun, WANG Xiu, ZHU Xuefeng(S outh China University of Technology, College of Automation Science and Engineering,Guangzhou, Guangdong, 510640)Abstract: PID controller which based on internal model control can set the system using only one adjustable parameter. And the parameter direct related to the response speed of closed loop and the robustness of loop. It is better to conventional PID controller in noise immunity and complexity.The MIC-PID controller can greatly improve the control results and be easy to control by the engineers and technicians. The turbidity control system of municipal water supply system is a non-linear and time-variant process with a large time constant and large dead time ,which is always difficult to control. When adding the MIC-PID controller to it can obtain a better control effect.Key words: Turbidity control; Large time delay system; Internal model control; PID controller;1 引言 在现代工业过程的控制中,PID 控制算法的到了广泛的应用。
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC)就是内部模型控制器(Internal model controller)的简称,由控制器与滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它就是一种实用性很强的控制方法,其主要特点就是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别就是对于鲁棒及抗扰性的改善与大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 就是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅就是一种实用的先进控制算法, 而且就是研究预测控制等基于模型的控制策略的重要理论基础, 也就是提高常规控制系统设计水平的有力工具。
值得注意的就是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只就是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析与改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型;d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。