内模控制技术
- 格式:ppt
- 大小:1.17 MB
- 文档页数:36


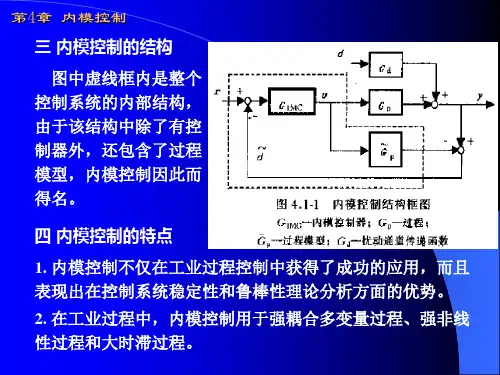
基于内模原理的PID控制器参数整定仿真实验之迟辟智美创作1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部份组成,两者对系统的作用相对自力,前者影响系统的响应性能,后者影响系统的鲁棒性.它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易.特别是对鲁棒及抗扰性的改善和年夜时滞系统的控制,效果尤为显著.因此自从其发生以来,不单在慢响应的过程控制中获得了年夜量应用,在快响应的机电控制中也能取得了比PID更为优越的效果.IMC设计简单、跟踪性能好、鲁棒性强,能消除不成测干扰的影响,一直为控制界所重视内模控制(Internal Model Control IMC) 是一种基于过程数学模型进行控制器设计的新型控制战略.其设计简单、控制性能良好,易于在线分析.它不单是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制战略的重要理论基础,也是提高惯例控制系统设计水平的有力工具.值得注意的是,目前已经证明,已胜利应用于年夜量工业过程的各类预测控制算法实质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采纳了未来的超前值(预检控制系统),这不单可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具.内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型;d G —扰动通道传递函数.(1)那时0)(,0)(≠=s G s R d ,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不论)(s G d 如何变动,对)(s Y 的影响为零.标明控制器是克服外界扰动的理想控制器.(2)那时0)(,0)(≠=s R s G d ,假若模型准确,即)()(s G s G m p =,又因为0)(=s D ,则0)(ˆ=s D,有 )()()()(1)()()()(IMC s R s R s G s G s R s G s G s Y m ===pp , )()]()(1[)()()()(IMC IMC s G s G s G s R s G s G s Y d p p -+=.当模型没有误差,且没有外界扰动时,其反馈信号0)()()]()([m p =+-s D s U s G s G ,标明控制器是)(s Y 跟踪)(s R 变动的理想控制器2.基于IMC 的控制器的设计2.1 因式分解过程模型式中,)(S G +m 包括了所有的纯滞后和右半平面的零点,并规定其静态增益1.)(S G m -为过程模型的最小相位部份.2.2 设计IMC 控制器这里F(S)为IMC 滤波器.选择滤波器的形式,以保证内模控制器为真分式.对阶跃输入信号,可以确定Ⅰ型IMC 滤波器的形式为:对斜坡输入信号,可以确定Ⅱ型IMC 滤波器的形式为: f T 为滤波时间常数,r 为整数,选择原则是使)(IMC s G 成为有理传递函数.因此,假设模型没有误差,可得设0)(=s G d 时,)(*)()()(s F s G s R s Y +=m .标明:滤波器F(s)与闭环性能有非常直接的关系.滤波器中的时间常数f T 是个可调整的参数.时间常数越小,Y(s)对R(s)的跟踪滞后越小.事实上,滤波器在内模控制中还有另一重要作用,即利用它可以调整系统的鲁棒性.其规律是,时间常数f T 越年夜,系统鲁棒性越好.2.3 与Smith 预估控制器相比力由图1-1内模控制的结构图,可以与Smith 预估控制器相比力.Smith 预估赔偿是在系统的反馈回路中引入赔偿装置,将控制通道传递函数中的纯滞后部份与其他部份分离.其特点是预先估计出系统在给定信号下的静态特性,然后由预估器进行赔偿,力图使被延迟了的被调量超前反映到调节器,使调节器提前举措,从而减少超调量并加速调节过程.如果预估模型准确,该方法能后获得较好的控制效果,从而消除纯滞后对系统的晦气影响,使系统品质与被控过程无纯滞后时相同.在下图所示的单回路控制系统中,控制器的传递函数为D(s),被控对象传递函数为Gp(s)e-s ,被控对象中不包括纯滞后部份的传递函数为Gp(s),被控对象纯滞后部份的传递函数为e-s.图1.2 史密斯赔偿后的控制系统此时系统的传递函数为:由上式可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性.史密斯赔偿的原理是:与控制器D(s)并接一个赔偿环节,用来赔偿被控对象中的纯滞后部份,这个赔偿环节传递函数为Gp(s)(1-e-s),为纯滞后时间,赔偿后的系统如图1.3所示.图1.3 史密斯赔偿后的控制系统 +D(s)G p (s)e - s _R(s)U(s)C(s)由控制器D(s)和史密斯预估器组成的赔偿回路称为纯滞后赔偿器,其传递函数为由上式可以看出,经过赔偿后,纯滞后环节在闭环回路外,这样就消除纯滞后环节对系统稳定性的影响.拉氏变换的位移定理说明e-s 仅仅将控制作用在时间座标上推移了一个时间,而控制系统的过度过程及其它性能指标都与对象特性为Gp(s)时完全相同,其控制性能相当于无滞后系统2.4 比力IMC 和Smith 预估控制两种控制战略假设实际系统的s s s G 10e 1101)(-+=,在MATLAB 中利用simulink 构造IMC 和Smith 预估控制两种结构图,并对控制器存在和不存在模型误差的情况进行分析控制效果.IMC 控制器结构:图1.4 IMC 控制系统Smith 预估控制结构:(1) 当IMC 控制器和Smith 预估控制器不存在模型误差时,输出的波形如下图:由上图可知,在不存在模型误差的情况下,IMC 控制和Smith 预估控制器都能取得较好的控制效果,使输出值最终趋于稳定.同时smith 预估控制器调节速度较快,可是会有少许的超调量,而IMC 控制则上升时间比力长,可是波形比力平稳的趋于稳定.(2) IMC 控制器存在模型误差时,输出的波形如下图:由上图可知,在存在模型误差的情况下,IMC 控制器虽会发生超调,可是最终曲线稳定,使输出值最终趋于稳定.(3)Smith 预估控制器存在模型误差时,输出的波形如下图:由上图可知,在Smith 预估控制器存在模型误差的情况下,其实不能取得良好的控制效果,最终波形发散,不能趋于稳定,说明Smith 预估器对控制器与模型的误差有着严格的要求,对存在的模型误差不能够及时消除.假设实际系统的s s s s G 42e )18(12)(-++-=,在MATLAB 中利用simulink 构造IMC 和Smith 预估控制两种结构图,并对控制器存在和不存在模型误差的情况进行分析控制效果.取Tf=2,4,6进行仿真,当不存在模型误差时,simulink框图如下:仿真结果如下图:从上面Tf 的分歧取值的仿真结果可以看出,Tf 越年夜,闭环输出响应减慢,可是到达稳定的时间会缩短,Tf 值越小,闭环输出响应越快,随着Tf 增加调节时间也随之增加.当IMC 控制器存在模型误差的时候,仿真结果如下图: 从仿真结果曲线可知,尽管存在模型误差,招致最终的输出曲线会有少量的超调,可是最终曲线都趋于稳定,说明IMC 控制器对存在的模型误差能够有较好的克服能力.3.基于IMC 的PID 控制器的设计3.1 具有内模控制结构的PID 控制器图1可以等价变换为如图2所示的简单反馈控制系统图1-2 IMC 的等价结构框图基于图2的内环反馈控制器有:系统输入输出关系可以表达为:系统扰动的输入输出关系可以表达为:由以上三个式子可以获得系统的闭环响应为:系统的反馈信号为:如果模型准确, 即)()(s G s G m p =, 无外部扰动, 即0)(=s d , 则模型的输入'y 与过程的输出y 相等, 此时反馈信号为零.这样, 在模型不确定和无未知输入的条件下, 内模控制系统具有开环结构.这就清楚地标明, 对开环稳定的过程而言, 反馈的目的是克服过程的不确定性.在工业实际过程控制时, 克服扰动是控制系统的主要任务, 而模型的不确定性是难免的.此时, 在图1-1所示的IMC 结构中, 反馈信号)(s d 就反映了过程模型的不确定性和扰动的影响,从而构成了闭环控制结构.理想的PID 控制器具有如下的形式:(1)由上图可得虚线框内等价的反馈控制器和内模控制器之间有如下关系:(2)内模控制器可分为三步进行设计.首先,暂不考虑系统的鲁棒性和约束,设计一个稳定的理想控制器;其次,引入滤波器,通过调整滤波器的结构和参数来获得期望的静态品质和鲁棒性;最后,对系统的抗干扰性进行验证.通常内模控制器的设计过程如下:第一步:把模型分解为全通部份和最小相位部份,即(3)式(3)中()M G s +是一个全通滤波器传递函数,对所有频率ω满足|()|0M G j ω=.在()M G s +中包括了所有时滞和右半平面零点.()M G s -是具有最小相位特征的传递函数,即()M G s -稳定且不包括预测项.第二步:模型误差的鲁棒性设计为抑制模型误差对系统的影响,增加系统的鲁棒性,在控制器中加入一个低通滤波器F( s) ,一般F( s) 取最简单形式如下:(4)式中阶次n 取决于的阶次以使控制可实现,为时间常数.这样两步设计所得的内模控制器为:(5)将式(5)代入式(1),得(6)当过程模型已知时,根据上式和PID 控制算式,由s 多项式各项幂次系数对应相等的原则,求解可得基于内模控制原理的PID 控制器各参数. 与单回路控制系统相比力,由于系统在结构上多了一个副回路,所以提高了系统抑制二次干扰的能力,可用信噪比来衡量系统的抗干扰能力.式(2)可以转化为下式:)()()(1)()(1)(m s F s G s G s F s G s G ---=m m c (7) 在S=0时,F (s )=1,)(m )(G m s G s =-,则有∞==0|)(s s G c .可以看到控制器的零频增益为无穷年夜.因此可以消除由外界阶跃扰动引起的余差.这标明尽管内模控制器自己没有积分功能,但由内模控制的结构保证了整个内模控制可以消除余差.设计 如果给定的被控对象形式为()1s M P M K G s e T s τ-=+,其中s e τ-的近似为1212s s e s τττ--=+,那么原被控对象近似为(12)()(1)(12)M M M K s G s T s s ττ-=++,根据以上的分析,我们可以获得()(1)(12)M M M K G s T s s τ-=++,()12M G s s τ+=-. 根据以上公式,推算内模控制器和PID 参数之间的关系: 由此可以得出2(2)M P M T K K τλτ+=+,2I M T T τ=+,2(2)M D M T T T ττ=+. 因此,在整个整定过程中,只有滤波器的时间常数λ需要调整,其他所有控制器的参数如比例增益P K ,积分时间I T 和微分时间D T 都与λ有关.关于λ的取值问题: 一般情况下,考虑形如()()()s P N s G s e D s τ-=的高阶加纯滞后过程,此处()N s 和()D s 为s 的多项式.该式的过程模型一般用来近似多变量系统中某个特定过程变量在一个或更多的其它过程变量处于边环控制状态下对一个控制作用的响应.当()N s 没有s 平面右侧零点时,对上述过程而言,其内模控制器可以由下式给出:()()()(1)IMC D s G s N s s γλ=+.此处γ为()()N s D s 的相对阶次,即()N s 的阶次与()D s 的阶次之差. 假设被控对象为:s s s s G 10e 180)151(2)(-+-=,采纳simulink 进行仿真实验.分别取Tf=20,40,60进行仿真,计算出Kp,TI,Td 后,simulink 框图如下:当Tf 值分歧时,控制量仿真曲线结果如下图:当Tf 值分歧时,输出仿真曲线结果如下图:仿真曲线分析:由每种系统在分歧滤波器时间常数Tf 的值下的仿真结果图可以看出,Tf 值越年夜,闭环输出响应越慢,操纵量的变动缓和.Tf 值越小,闭环输出响应越快,能使闭环系统更快到达稳定.实际上,Tf 取值不能太年夜也不能太小,要权衡响应速度与稳定性之间的关系.与图 2-2比力图像基本一致,由于s τ-e 是取的近似,所以 IMC-PID 调节与 IMC 调节不能完全一致,图像有一些偏差与变动,但系统仍能取得较好的控制效果,输出曲线最终稳定在1.令被控对象参数发生变动,进行仿真来检验系统的鲁棒性能.对我们所研究的被控过程的数学模型为s s s s G 10e 180)151(2)(-+-=,取Tf=60,但令被控对象的参数发生变动,再利用MATLAB 进行仿真,分析输出曲线.Tf=60时,系统的simulink 框图如下:Tf=60 ,令K 减少25%时的系统的simulink 框图为:Tf=60 ,令T 减少25%时的系统的simulink 框图为:仿真曲线为:仿真曲线分析:在滤波器时间常数Tf取值合理的情况下,被控对象参数发生变动25%,仍能坚持较好的性能,具有较好的静态响应速度,曲线能在短时间内到达稳定,具有良好的鲁棒性.3.4 总结内模控制具有良好的鲁棒性能,当实际生产过程参数发生变动时,系统均能在可以容忍的时间范围内到达稳态值,而且无较年夜振荡,只是静态过渡时间有所不同;可是分歧ε还是会影响到系统响应的,ε越小,单元阶跃响应超调量越年夜,ε越年夜,超调量越小.从以上内模PID 控制器的设计过程可以看出,只有滤波器的时间常数是需要整定的参数,方法比力简单,而且在系统特性变动的情况下具有很强的鲁棒性和抗干扰能力,输出超调很小或基本无超调,理论分析和仿真结果均标明控制量变动十分平稳,有利于现场执行机构的呵护.该方法为广泛使用的PID 控制器的参数整定提供了新的方法,具有较高的工程应用价值.。
控制系统内模原理的解释
内模原理
⾸先是内模原理:pi控制器⼤家都知道是可以实现阶跃信号的跟踪的,其根本原因在于pi控制器内含有⼀个阶跃信号的内模(阶跃信号的laplace变换为1/s),但是对于正弦信号的跟踪(cos(x)的laplace变换为s/(s^2+w^2))却难以实现,尤其是正弦信号频率较⾼的时候,这个时候我们就需要在控制器内加⼊与正弦信号⼀致的内模,PI控制器变为PR控制器,其laplace变换为kp + ki*s/(s^2+w^2),这样就可以实现正弦信号的跟踪。
然后是内模控制:实现内模控制的⾸要条件是知道你控制对象的传递函数G(s),这个传递函数跟实际系统的特性有⼀些偏差(实际系统的真实特性为传递函数G0(s),这个我们求不出来),这个时候我就可以利⽤这个传递函数设计⼀个内模控制器(IMC)来完成系统的控制,然后如果我们使⽤的传递函数与实际系统真实特性很接近,即G(s)=G0(s),那这个控制器就可以抑制各种⼲扰对系统的影响,实现控制系统的⽆差跟踪。
根据内膜原理,要实现对信号的⽆静差跟踪,控制器必须包含信号的模型,PI的积分环节的传递函数为1/S,所以PI只能对阶跃信号进⾏⽆静差跟踪,正弦信号的传函为w/s^2+w^2,所以要实现⽆静差跟踪,可以⽤PR控制器,或者⽤clark,Park将交流量变化为直。
所以总结下来我认为内模原理与内模控制是两码事,前者针对的是参考的跟踪信号类型,后者针对的是控制对象本⾝。
理论上讲,内模原理是线性系统的输出调节理论,⽽内模控制是利⽤内模原理设计控制器的⽅法,本质都是输出调节。

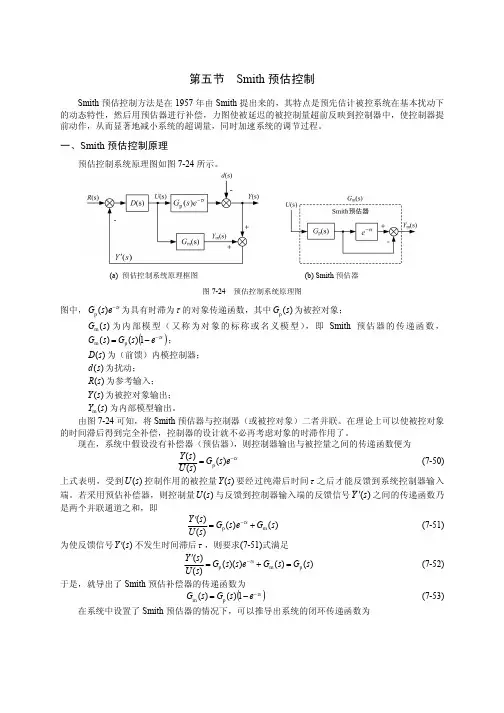
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
基于内模控制的永磁同步电机控制研究摘要:本文提出了一种基于内模控制的永磁同步电机控制方法。
该控制方法采用改进的内模控制结构,其主要特点是将梯形模型参数化并融入永磁同步电机开环动态模型中,从而实现对永磁同步电机的有效控制。
为了验证所提出控制方法的可行性,我们选择MATLAB软件平台仿真永磁同步电机控制系统模型,并针对容错信号和ARW等不确定因素进行了分析。
为了进一步评估该方法的性能,我们进行了比较实验,其结果表明所提出的控制方法可以获得更好的系统响应和更小的时延。
关键词:永磁同步电机(PMSM);内模控制;MATLAB仿真;比较实验正文:本文研究的目的是研究基于内模控制的永磁同步电机(PMSM)技术。
永磁同步电机(PMSM)在电机控制领域有广泛的应用,但由于其非线性特性,传统的控制方法有时无法满足控制精度要求。
内模控制是一种改进的控制技术,通过将内模的参数化技术融入到电机的开环控制中,实现精确的、相较传统技术更有效的电机控制。
因此,本文旨在使用MATLAB软件平台仿真永磁同步电机控制系统,并对容错信号和ARW等不确定因素进行分析。
此外,比较实验也用于进一步评估所提出方法的性能。
实验结果表明,基于内模控制的永磁同步电机控制方法以及其结构可以有效地控制永磁同步电机,并且有效地抑制容错信号和ARW等不确定因素。
为了确保永磁同步电机运行的正常,选取合适的控制器及其参数是很重要的。
在本文中,采用适当的PMSM控制器参数,通过对不同构成参数的研究来改善外环控制系统的性能。
PID子系统对外环控制器参数的选择至关重要,因为这些参数决定了系统的成功程度。
在本文中,针对PMSM的内模控制器参数采用基于品质因子(QF)的闭环控制方法进行了调整。
通过调整内模子系统的参数,可以有效抑制外环的抖动特性。
为此,需要仔细考虑和研究PMSM状态空间方程和内模参数的变化,以获得最佳的控制性能。
当传统控制器无法满足控制要求时,一种替代方案是使用模糊控制技术。
收稿日期:2001206204基金项目:山西省自然科学基金项目(20001038)作者简介:张井岗(19662),男,山西新降人,硕士,教授,研究方向为智能控制、鲁棒控制及其应用。
一种二自由度内模控制方法张井岗,李临生(太原重型机械学院自动化系,山西太原030024) [摘 要] 针对典型的工业过程控制对象,提出了一种二自由度内模控制方法,此方法可以使系统同时具有良好的目标值跟踪特性、干扰抑制特性和鲁棒性,改进了常规内模控制的不足,而且控制算法简单、参数调整方便,理论分析和仿真实验结果表明了它的有效性。
[关键词] 二自由度控制;内模控制;鲁棒性[中图分类号]TP273 [文献标识码]A [文章编号]100020682(2002)0420063203A control method performed by a tw o 2degree 2of 2freedom internal modelZH ANGJing 2gang ,LI Lin 2sheng(Automation Dept o f Taiyuan H eavy Machinery Institute ,Shanxi 2Taiyuan 030024,China ) Abstract :This paper presents a control method performed by a tw o 2degree 2of 2freedom internal m odel con 2troller used in a typical industrial process.This method can bring a process control system to keep very g ood characteristics of both command tracking and disturbance as well as robustness simultaneously.The method can als o im prove the shortcoming of a conventional internal m odel control.In addition ,its control alg orithm is sim 2ple and the adjustment of control parameters is easy.Theoretical analysis and simulation results show the valid 2ity of this control method.K ey w ords :T w o 2degree 2of 2freedom control ;Internal method control ;R obustness1 引 言 在工业过程控制领域,许多被控过程的机理比较复杂,具有高度非线性、慢时变、纯滞后等特点。