内模控制
- 格式:pdf
- 大小:317.31 KB
- 文档页数:28
内模控制的概念
内模控制是一种控制理论和方法,旨在通过对控制系统内部模型进行建模和设计,来实现对系统的高性能控制。
它将系统模型与控制器相结合,以实现对系统输入输出信号的精确跟踪和鲁棒性。
与传统的外模控制不同,内模控制能够通过对系统内部结构和参数进行调整,控制系统的动态特性和稳定性质。
内模控制的核心思想包括两个关键概念:内模和内模控制器。
内模是指可以完全描述系统动态特性的模型,它能够准确地反映系统的输入输出关系。
内模控制器则是根据内模来设计的控制器,它能够根据系统的内部模型对输入信号进行调整,以实现对系统输出的精确控制。
内模控制的优点在于它能够适应各种复杂的现实控制系统,并具有一定的鲁棒性和适应性。
它能够实现对系统多变量输入输出的高性能控制,并具有抗干扰和鲁棒性强的特点。
此外,内模控制还能够利用系统内部的信息和模型来进行在线参数调整和自适应控制。
总的来说,内模控制是一种基于系统内部模型的高级控制方法,它通过对系统的内部结构和参数进行建模和设计,能够实现对复杂系统的高性能控制。
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
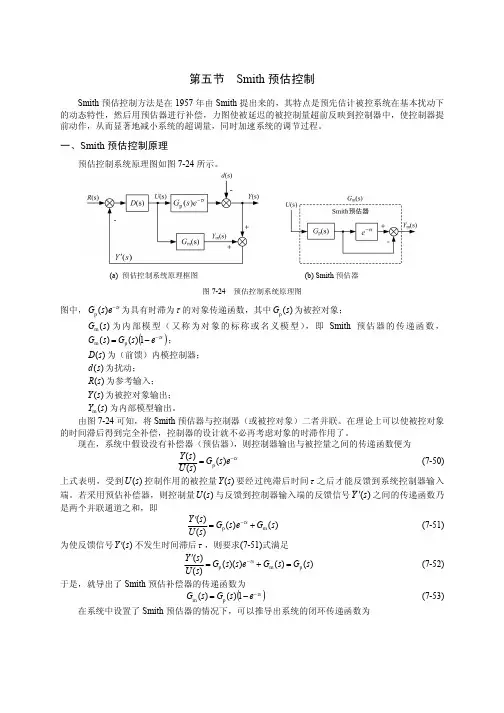
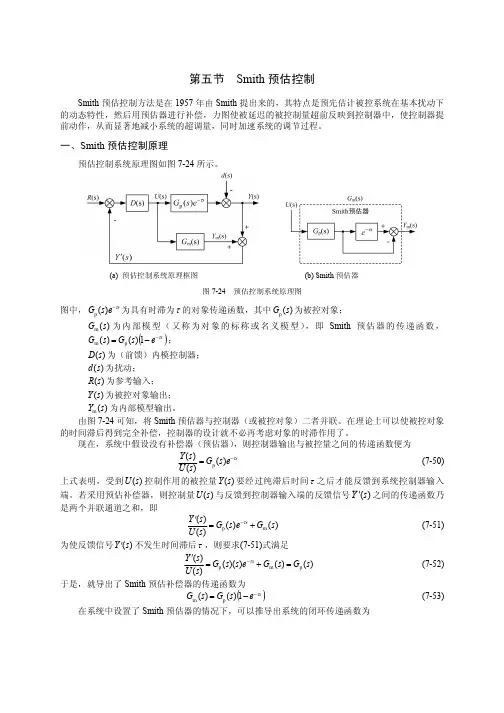
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。

第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。


内模控制内模控制是一种基于过程数学模型进行控制器设计的新型控制策略。
它与史,控制器设计可由过程模型直接求取。
密斯预估控制很相似,有一个被称为内部模型的过程模型设计简单、控制性能好、鲁棒性强,并且便于系统分析。
内模控制方法由Garcia 和Morari 于1982年首先正式提出。
可以和许多其它控制方式相结合,如内模控制与神经网络、内模控制与模糊控制、内模控制和自适应控制、内模控制和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用于工程实践中,取得了良好的效果。
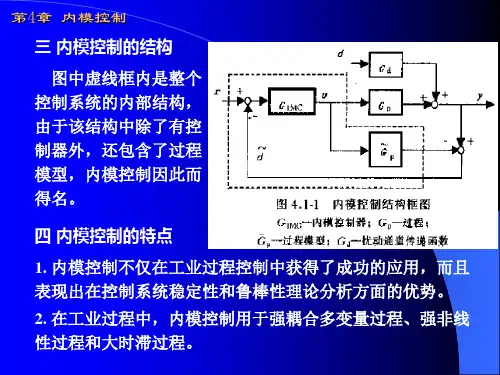
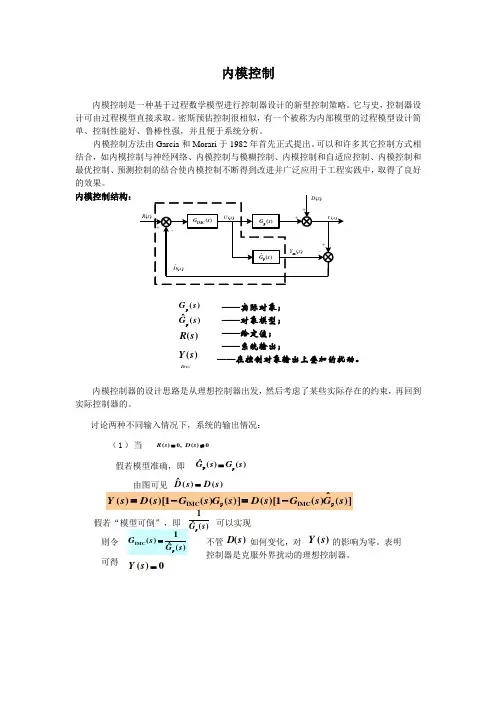
内模控制结构:内模控制器的设计思路是从理想控制器出发,然后考虑了某些实际存在的约束,再回到实际控制器的。
讨论两种不同输入情况下,系统的输出情况:(1)当 0)(,0)(≠=s D s R 假若模型准确,即 由图可见)()(ˆs G s G p P =)()(ˆs D s D =)](ˆ)(1)[()]()(1)[()(IM C IM C s G s G s D s G s G s D s Y pp -=-= 可以实现 )(ˆ1s p)(=s Y 可得 不管如何变化,对 的影响为零。
表明控制器是克服外界扰动的理想控制器。
则令 )(s D )(s Y——实际对象; ——对象模型; ——给定值; ——系统输出; ——在控制对象输出上叠加的扰动。
)(s G p )(ˆs G p)(s R )(s Y )(s D(2)当时: 0)(,0)(≠=s R s D )()(ˆs G s G pP =假若模型准确,即 0)(=s D 0)(ˆ=s D表明控制器是 跟踪 变化的理想控制器。
)(s R )(s Y 当模型没有误差)()]()(1[)()()()(IMC IMC s D s G s G s R s G s G s Y p p -+=其反馈信号 0)()()](ˆ)([)(ˆpp =+-=s D s U s G s G s D ——内模控制系统具有开环结构。
1现状与展望作者简介:曾成(1993- ),男,硕士研究生,研究方向为永磁同步电机控制; 张维(1992- ),男,硕士研究生,研究方向为永磁同步电机控制。
内模控制在永磁同步电机中的应用曾成,张维(东南大学 电气工程学院,江苏 南京 210096)摘 要:永磁同步电机控制系统是典型的非线性多变量强耦合系统,应用内模控制(IMC)策略能够很好实现电机电流解耦以及速度快速跟踪。
阐述了IMC 的发展及IMC 控制器的设计,介绍了当前永磁同步电机主流控制策略,分析了IMC 在永磁同步电机控制系统中的应用及存在的问题,并提出改进思路。
关键词:永磁同步电机;内模控制;解耦;算法中图分类号:TM341;TM921.5 文献标识码:A 文章编号:1007-3175(2018)06-0001-09Abstract: Permanent magnet synchronous motor (PMSM) control system is a typical nonlinear multivariable strong coupling system. The application of internal model control (IMC) strategy could achieve good motor current decoupling and fast speed tracking. This paper described the development of IMC and the design of IMC controller. Introduction was made to the current mainstream control strategy of PMSM. This paper analyzed the application of IMC in PMSM control system and the problems existing in the application of the internal model control in the permanent magnet synchronous motor control and proposed the improvement ideas. Key words: permanent magnet synchronous motor; internal model control; decoupling; algorithmZENG Cheng, ZHANG Wei(School of Electrical Engineering, Southeast University, Nanjing 210096, China )Application of Internal Model Control in PermanentMagnet Synchronous Motor0 引言永磁同步电机控制系统是一个具有多个耦合状态和参数变化的非线性系统[1]。
内模控制原理介绍如下:
内模控制是一种先进控制策略,内模控制器的设计是基于被控对象过程数学模型的。
内模控制具有设计结构简单、调节参数方便的特点;特别是增强了控制系统的鲁棒性,并且提高了系统的抗干扰能力。
内模控制方法在工业过程控制中应用广泛,与传统的控制方法相比内模控制方法具有更好的控制效果,具有实际的应用价值。
可以互相转换,但单位负反馈系统与内模控制系统的设计思路存在本质不同。
在单位负反馈系统中,将过程的输出作为反馈,使得外部扰动在反馈量中与其它因素混在一起影响输出,有时得不到及时的补偿。
在内模控制系统中,反馈量变为扰动估计量,在模型与对象不匹配时,扰动估计量包含模型失配的一些信息,使系统的鲁棒性更强,当模型与对象匹配时,系统相当于幵环。
的主要作用是实现对设定值。
的良好跟踪,保证控制系统的跟踪性、鲁棒性和抗干扰性。
线性系统内模控制器设计简单,分为模型完全可逆和模型不堯全可逆两种情况;当模型完全可逆时控制器由模型的逆和合适的滤波器组成;当模型不完全可逆时,模线性系统内模控制器设计简单,分为模型完全可逆和模型不堯全可逆两种情况;当模型完全可逆时控制器由模型的逆和合适的滤波器组成;当模型不完全可逆时,模型可以分解为可逆和不可逆两部分,控制器由可逆部分的逆和合适的滤波器组成。