内模控制及其仿真应用
- 格式:pdf
- 大小:2.57 MB
- 文档页数:3

模拟仿真在自动化控制领域的应用研究自动化控制技术作为一门重要的技术学科,目前已经广泛应用于诸如制造业、交通运输、环境监测等多个领域。
而在自动化控制领域中,模拟仿真技术作为一种重要的手段,可以帮助工程师们通过虚拟仿真环境来进行工程项目的设计、优化和验证,提高生产效率和质量。
本文将从模拟仿真在自动化控制领域中的应用、技术原理和案例研究等方面进行分析和探讨。
应用场景模拟仿真技术的应用场景非常广泛,可以用于机器人的控制、城市交通的规划、工厂生产线优化等众多领域。
在自动化控制领域中,模拟仿真技术可以被应用于多个领域,如:1. 自动化生产线与设备控制模拟仿真可以在设计和开发自动化设备前模拟和分析生产线,以帮助提高生产效率和工作效率。
这种技术可以模拟不同材料在不同的机器设备上加工过程和测试结果的情况,以帮助公司现实出售的设备是否能够满足客户的需求。
同时,模拟计算平台可以为工程师在实际构建生产线功能库时提供基础。
2. 工业控制频率信号处理在自动化控制的领域,频率信号处理是一种常见的技术。
例如,在电力工业中,控制系统需要根据频率并自动将电力交付到不同区域的电网。
模拟仿真可以通过模拟信号处理result来提前检测器的漏洞和算法漏洞,确保在实际应用中程序的可靠性和稳定性。
技术原理模拟仿真技术是通过数字计算和分析来模拟真实世界的行为,这种技术可以帮助研究人员预测和调整设计方案,为自动化控制领域带来真正的价值和巨大的经济利益。
模拟仿真技术原理的核心是数学模型。
数学模型是将系统或过程转化为数学表达式的方法。
在自动化控制领域中,模拟仿真技术通过使用数学模型来预测在不同环境中的对象在真实事件中的行为并进行相关的控制操作。
在模拟仿真中,研究人员首先需要将真实系统或过程分解成其组成部分。
这些部分通常由不同的动态和物理定律驱动,然后研究人员使用数学公式建立模型表达式。
这些模型表达式通常需要解决方程的求解、数值积分、微分方程等计算问题。
内模 PID控制污水 PH的设计与应用Apply and design on PH control of sewage by IMC PID1.内容摘要面对国内用水紧张以及水污染严重的现状,采取有效措施对污水进行处理已经成为亟待解决的难题。
污水处理涉及到多个复杂控制过程,PH值中和反应是其中非常重要的过程之一,PH值对其它出水指标有着重要影响,它的稳定控制将直接影响污水处理整个过程是否达标。
为此,报告中提出了PH值中和过程的内模PID的控制策略。
由于污水处理现场中和反应过程中,PH值的控制具有强非线性、大滞后性、不确定性以及鲁棒性差的特点,本文针对以往单闭环PID对PH值的控制品质存在不足,提出将内模控制策略应用在污水处理PH值中和过程,设计内模PID控制器来稳定调节PH值。
为了验证所设计控制器的可行性,利用软件仿真与实验,与常规的控制方式从多个方面进行分析对比,内模PID控制能够明显的改善被控对象的目标值跟踪特性,提高抑制干扰能力,系统的动态特性可以很好的满足。
即使发生模型失配,也能实现很好的控制。
并且能够减少参数调整的个数,结构设计上也算简单。
利用软件进行仿真与实验,结果表明,该方法可以更好的改善控制系统的性能。
1.正文1.内模PID算法1.内模控制的原理上世纪八十年代,Garcia和Morari两位学者经过长时间的研究复杂对象的控制过程,全面分析多变量、非线性、时变的对象模型,结合史密斯预估计控制策略,系统的向世人阐述了一种全新的控制方法,这就是内模控制方法。
依据被控对象的数学模型, 经过简单有效的设计步骤,就可以设计出针对实际被控对象的内模控制器,用该控制器对被控对象进行控制,可以提高系统动态变化的跟踪能力,获得良好的控制效果,实用性也特别强,同时对外界的强干扰也有很好的抑制效果。
虽然PID就能解决自动化生产中很多的控制问题,但常规的PID控制很难有效的控制具有非线性、大滞后性、多变量耦合的复杂系统。



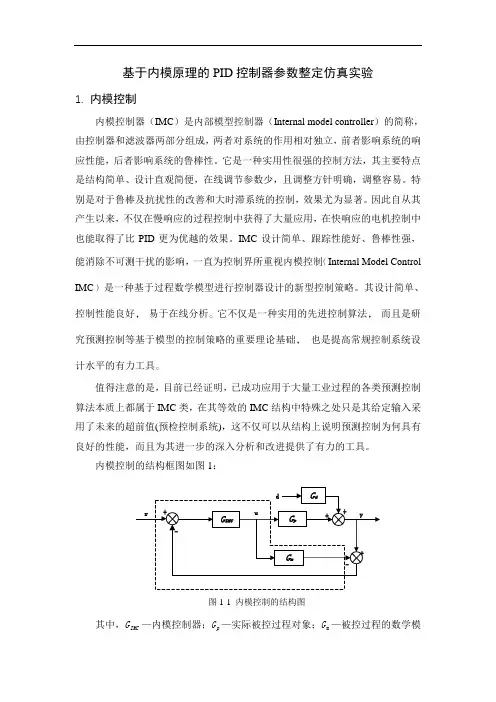
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC )是内部模型控制器(Internal model controller )的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅是一种实用的先进控制算法, 而且是研究预测控制等基于模型的控制策略的重要理论基础, 也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
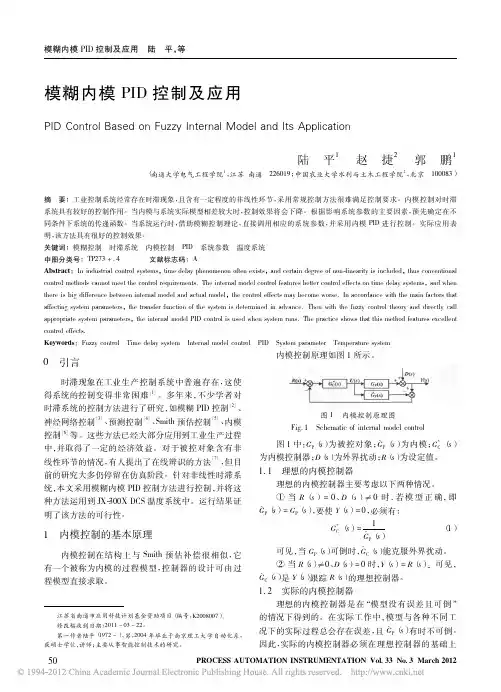
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺姓名王大林指导教师陈夕松设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
编写基于PLC的IMC应用软件,以及基于PC上位机的应用组态软件,实现液位过程的自动控制和监督管理,仿真和实验证明了该方案的有效性。
1现状与展望作者简介:曾成(1993- ),男,硕士研究生,研究方向为永磁同步电机控制; 张维(1992- ),男,硕士研究生,研究方向为永磁同步电机控制。
内模控制在永磁同步电机中的应用曾成,张维(东南大学 电气工程学院,江苏 南京 210096)摘 要:永磁同步电机控制系统是典型的非线性多变量强耦合系统,应用内模控制(IMC)策略能够很好实现电机电流解耦以及速度快速跟踪。
阐述了IMC 的发展及IMC 控制器的设计,介绍了当前永磁同步电机主流控制策略,分析了IMC 在永磁同步电机控制系统中的应用及存在的问题,并提出改进思路。
关键词:永磁同步电机;内模控制;解耦;算法中图分类号:TM341;TM921.5 文献标识码:A 文章编号:1007-3175(2018)06-0001-09Abstract: Permanent magnet synchronous motor (PMSM) control system is a typical nonlinear multivariable strong coupling system. The application of internal model control (IMC) strategy could achieve good motor current decoupling and fast speed tracking. This paper described the development of IMC and the design of IMC controller. Introduction was made to the current mainstream control strategy of PMSM. This paper analyzed the application of IMC in PMSM control system and the problems existing in the application of the internal model control in the permanent magnet synchronous motor control and proposed the improvement ideas. Key words: permanent magnet synchronous motor; internal model control; decoupling; algorithmZENG Cheng, ZHANG Wei(School of Electrical Engineering, Southeast University, Nanjing 210096, China )Application of Internal Model Control in PermanentMagnet Synchronous Motor0 引言永磁同步电机控制系统是一个具有多个耦合状态和参数变化的非线性系统[1]。
模型参考模糊自适应内模控制及其在电厂主汽温控制中的应用研究的开题报告一、研究背景及意义随着我国电力工业的迅速发展,电厂主汽温控制系统已成为电力系统中不可或缺的重要组成部分。
主汽温控制直接影响整个发电系统的稳定性和效率,因此对于电站主汽温控制的研究成为电力系统领域的重点之一。
传统的主汽温控制方法是PID(Proportional Integral Derivative)控制方法,但是在电厂主汽温控制中仍然存在某些问题,如系统非线性、负荷变化引起的控制误差等。
针对以上问题,模糊自适应内模控制在电厂主汽温控制中得到了广泛应用,成为目前主流的控制方法之一。
模糊自适应内模控制是一种高效、鲁棒、自适应的控制方法,对于电厂主汽温控制的异步非线性模型有较好的适应性,可有效提高主汽温控制的精度和鲁棒性能,具有很高的理论价值和实际应用价值。
因此,对模糊自适应内模控制及其在电厂主汽温控制中的应用进行深入研究,对于提高电厂主汽温控制的控制精度和鲁棒性能具有重大的意义。
二、研究内容本文主要研究模糊自适应内模控制及其在电厂主汽温控制中的应用。
具体内容包括:1. 模糊自适应内模控制的理论基础和关键技术。
介绍模糊自适应内模控制的基本概念和原理,以及控制器设计中的关键技术,如模糊控制、自适应控制、内模控制等。
2. 电厂主汽温控制系统的建模及其非线性特性分析。
建立电厂主汽温控制系统的数学模型,分析系统的非线性特性,为后续控制器设计提供理论支撑。
3. 模糊自适应内模控制在电厂主汽温控制中的应用研究。
基于所建立的主汽温控制系统模型,设计模糊自适应内模控制器,并进行模拟仿真和实验验证。
分析模糊自适应内模控制器在电厂主汽温控制中的应用效果,评估其控制精度和鲁棒性能。
三、研究方法本文采用的研究方法为理论研究、数学建模、仿真实验及实际应用评估。
具体研究方法包括:1. 理论研究。
通过文献综述和理论分析,深入了解模糊自适应内模控制的理论基础和关键技术。
控制系统建模与仿真方法控制系统建模与仿真方法是现代控制系统设计和开发的基础。
通过建立准确的控制系统模型,并用仿真方法验证其性能,能够帮助工程师和设计师有效地进行控制系统的设计、调试和优化。
本文将介绍几种常见的控制系统建模与仿真方法,并探讨它们的适用范围和优缺点。
一、传递函数法传递函数法是一种基于线性时不变系统的建模方法。
它通过将控制系统表示为输入输出之间的线性关系来描述系统的动态特性。
传递函数法最适用于单输入单输出系统,并且要求系统是线性时不变的。
传递函数可以通过数学分析或实验测量来确定,其中包括系统的零点、极点和增益。
利用传递函数,可以进行频域和时域分析,评估系统的稳定性和性能,并进行控制器设计和参数调整。
二、状态空间法状态空间法是一种基于系统状态变量的建模方法。
它将系统的状态量表示为时间的函数,通过状态方程和输出方程描述系统的动态行为。
状态空间法适用于多输入多输出系统以及具有非线性和时变特性的系统。
状态空间方法可以更直观地描述系统的动态行为,并方便进行观测器设计和状态反馈控制。
此外,状态空间法还允许将系统的非线性扩展为线性模型,并通过状态反馈控制实现对非线性系统的控制。
三、仿真方法仿真方法是通过计算机模拟来模拟和评估控制系统的性能。
它可以基于建立的模型对系统的行为进行预测,并通过仿真结果来验证系统是否满足设计要求。
常见的仿真工具包括MATLAB/Simulink、LabVIEW、Python等。
这些工具提供了丰富的模型库和仿真环境,支持不同的建模方法和仿真算法。
通过仿真方法,可以进行系统特性分析、参数优化和控制器验证,大大减少了实际系统调试的时间和成本。
四、硬件在环仿真硬件在环仿真是将实际的硬件设备与仿真模型相结合,进行实时的控制系统测试和验证。
它将计算机仿真与实际硬件连接起来,通过数值计算和物理实验相结合的方式,提供了更接近实际运行条件的仿真环境。
硬件在环仿真可以有效地评估控制系统的稳定性、鲁棒性和性能,并进行实际设备的系统集成和调试。