这里 f 为IMC滤波器。选择滤波器的形式,以保证 内模控制器为真分式。
对于阶跃输入信号,可以确定Ⅰ型IMC滤波器的形式
1 f ( s) (Tf s 1)r
对于斜坡输入信号,可以确定Ⅱ型IMC滤波器的形式为
rTf s 1 f ( s) (Tf s 1)r
Tf ——滤波器时间常数。
4.采用理想控制器构成的系统,对模型误差极为敏感,鲁棒性、 稳定性变差。
2. 内模控制器的设计
步骤1 因式分解过程模型
ˆ G ˆ G ˆ G p p pˆ 包含了所有的纯滞后和右半平面的零点,并 式中,G p ˆ 为过程模型的最小相位部分。 规定其静态增益为1。G p
步骤2 设计控制器
GIMC ( s ) 1 ˆ ( s) G p f ( s)
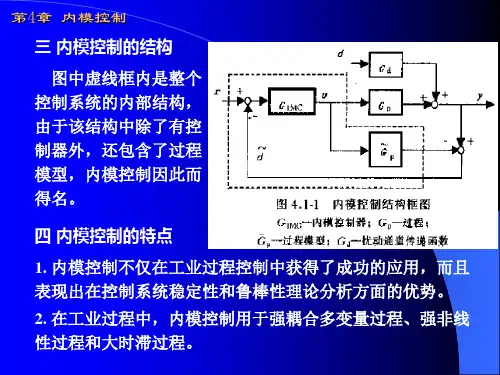
过程无扰动Leabharlann 图6-3过程有扰动
例3-2 考虑实际过程为
R( s)
D( s)
10s 1 5s 1
1 G( s) e 10 s 10s 1
1 10 s 1
e
10 s
Y (s)
1 e 8s 10s 1
内部模型为
ˆ ( s) G 1 e8 s 10s 1
讨论(1)当 K 1 , T 2 , 1 时,滤波时间常数取不同值 时,系统的输出情况。(2)当 K 1 , T 2 ,由于外界干扰 使 由1变为1.3,取 Tf 不同值时,系统的输出情况。
1~4曲线分别为 Tf 取0.1、0.5、1.2、2.5时,系统的输 出曲线。
图6-2
2.若对象含有s平面右半平面( RHP)零点,
ˆ 1 ( s) 中含有RHP极点,控制器本身不稳定,闭 则 GIMC (s) G p 环系统不稳定。