shading补偿算法
- 格式:docx
- 大小:3.62 KB
- 文档页数:2


三坐标温度补偿算法公式(一)三坐标温度补偿算法公式1. 什么是三坐标温度补偿算法公式?三坐标温度补偿算法公式是一种用于三坐标测量仪器的测量值校准的方法。
由于温度的变化会对测量精度产生影响,所以需要进行温度补偿。
温度补偿算法公式可以根据测量的温度和其他相关参数,对测量值进行修正,提高测量精度。
2. 温度补偿算法公式的应用温度补偿算法公式广泛应用于各类精密测量领域中,例如机械制造、电子元器件制造等。
通过对测量仪器测量值的温度补偿,可以提高测量精度,减小测量误差,确保测量结果的准确性。
3. 温度补偿算法公式的列举以下是几种常见的三坐标温度补偿算法公式的列举:线性温度补偿公式C = A + B * T其中,C为补偿值,A和B为参数,T为温度。
线性温度补偿公式根据温度变化线性地修正测量值。
参数A和B 可以根据实际情况进行调整,以适应不同的测量设备和测量范围。
多项式温度补偿公式C = a0 + a1 * T + a2 * T^2 + ... + an * T^n其中,C为补偿值,a0~an为多项式系数,T为温度。
多项式温度补偿公式可以根据温度变化非线性地修正测量值。
多项式的阶数可以根据实际需要选择,通常选择2~4阶多项式。
指数温度补偿公式C = A * exp(B * T)其中,C为补偿值,A和B为参数,T为温度。
指数温度补偿公式通过指数函数修正测量值,适用于温度变化较大的情况。
参数A和B可以根据实际情况进行调整。
4. 温度补偿算法公式的示例解释以线性温度补偿公式为例,假设测量温度为20℃,参数A和B的值分别为2和。
根据公式计算补偿值:C = 2 + * 20 = 4通过线性温度补偿公式,我们可以得到实际测量值为4,而不是在未进行温度补偿时的测量值。
5. 总结三坐标温度补偿算法公式是用于提高测量精度的重要工具。
通过选取适当的补偿公式和参数,可以根据测量仪器的特性和使用环境,对测量值进行修正,减小温度变化对测量精度的影响,从而确保测量结果的准确性。

shading补偿原理Shading补偿原理引言:在数字图像处理领域,shading补偿原理是一项重要的技术,用于消除图像中因光照不均匀而产生的阴影或亮度变化。
本文将详细介绍shading补偿原理的基本概念、应用和实现方法。
一、基本概念1.1 shading补偿的定义Shading补偿是指通过对图像进行处理,消除由于光照不均匀或镜头特性等原因引起的图像亮度变化,使图像在整体上呈现均匀的亮度分布。
1.2 shading补偿的原理Shading补偿的原理是通过对图像进行分析和处理,将图像中的亮度变化分解为两个部分:全局分量和局部分量。
全局分量是指整个图像的亮度变化趋势,局部分量则是指图像中局部区域的亮度变化。
通过分析和处理这两个部分,可以准确地补偿图像中的阴影和亮度变化。
二、应用2.1 摄影领域在摄影领域,shading补偿可以用于消除由于光照不均匀或镜头特性引起的图像阴影。
通过对图像进行分析和处理,可以使照片呈现出更加真实和清晰的效果。
2.2 机器视觉在机器视觉领域,shading补偿可以用于提高图像处理算法的准确性。
由于光照不均匀可能导致图像中某些区域的亮度变化,从而影响目标检测、图像识别等算法的性能。
通过对图像进行shading补偿,可以提高算法的鲁棒性和准确性。
2.3 医学影像在医学影像领域,shading补偿可以用于改善X射线、MRI等影像的质量。
由于光照不均匀或仪器特性的影响,医学影像中常常存在阴影或亮度变化。
通过对影像进行shading补偿,可以使医学影像更加清晰和可靠。
三、实现方法3.1 基于图像分析的方法基于图像分析的shading补偿方法是通过对图像进行分析和建模来实现的。
首先,需要对图像进行预处理,如去噪、边缘检测等。
然后,通过对预处理后的图像进行分析,提取全局分量和局部分量。
最后,根据分析得到的结果,对图像进行补偿,消除阴影和亮度变化。
3.2 基于图像处理的方法基于图像处理的shading补偿方法是通过对图像进行滤波和增强来实现的。

镜头阴影校正算法
镜头阴影校正(Lens Shading Correction,简称LSC)是一种常见的图像预处理技术,用于消除图像中由于镜头特性引起的阴影效应。
LSC算法的原理是通过对图像进行均衡化处理,使得图像的亮度分布接近于均匀分布。
具体来说,LSC算法包括以下步骤:
图像分割:将输入图像划分为若干个区域。
这可以通过简单的网格划分或更复杂的图像分割算法来实现。
每个区域代表图像中的一个局部区域。
计算均值:对于每个区域,计算其亮度的均值。
可以采用简单的平均值计算方法,也可以选择其他更复杂的统计方法。
计算校正系数:对于每个区域,计算其校正系数。
校正系数表示将该区域的亮度调整为均匀分布所需的缩放因子。
校正系数的计算可以基于每个区域的均值和整个图像的均值之间的比例关系。
应用校正:使用计算得到的校正系数,对图像进行校正处理。
对于每个像素,将其亮度值乘以对应区域的校正系数,以实现亮度均衡化。
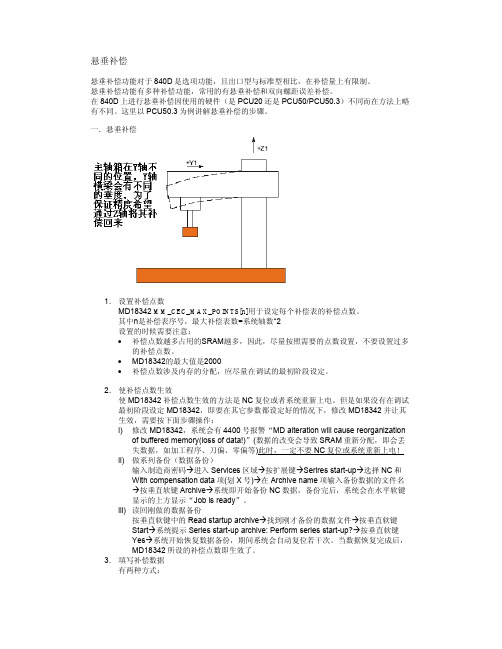
悬垂补偿悬垂补偿功能对于840D是选项功能,且出口型与标准型相比,在补偿量上有限制。
悬垂补偿功能有多种补偿功能,常用的有悬垂补偿和双向螺距误差补偿。
在840D上进行悬垂补偿因使用的硬件(是PCU20还是PCU50/PCU50.3)不同而在方法上略有不同。
这里以PCU50.3为例讲解悬垂补偿的步骤。
一.悬垂补偿1.设置补偿点数MD18342 MM_CEC_MAX_POINTS[n]用于设定每个补偿表的补偿点数。
其中n是补偿表序号,最大补偿表数=系统轴数*2设置的时候需要注意:•补偿点数越多占用的SRAM越多,因此,尽量按照需要的点数设置,不要设置过多的补偿点数。
• MD18342的最大值是2000•补偿点数涉及内存的分配,应尽量在调试的最初阶段设定。
2.使补偿点数生效使MD18342补偿点数生效的方法是NC复位或者系统重新上电。
但是如果没有在调试最初阶段设定MD18342,即要在其它参数都设定好的情况下,修改MD18342并让其生效,需要按下面步骤操作:i) 修改MD18342,系统会有4400号报警“MD alteration will cause reorganizationof buffered memory(loss of data!)”(数据的改变会导致SRAM重新分配,即会丢失数据,如加工程序、刀偏、零偏等)此时,一定不要NC复位或系统重新上电!ii) 做系列备份(数据备份)输入制造商密码Æ进入Services区域Æ按扩展键ÆSerires start-upÆ选择NC和With compensation data项(划X号)Æ在Archive name项输入备份数据的文件名Æ按垂直软键ArchiveÆ系统即开始备份NC数据,备份完后,系统会在水平软键显示的上方显示“Job is ready”。
iii) 读回刚做的数据备份按垂直软键中的Read startup archiveÆ找到刚才备份的数据文件Æ按垂直软键StartÆ系统提示Series start-up archive: Perform series start-up?Æ按垂直软键YesÆ系统开始恢复数据备份,期间系统会自动复位若干次。

三坐标温度补偿算法公式
首先,我们来看温度补偿系数的计算。
一般情况下,温度补偿系数可
以通过实验测得,其计算方式通常为:
\[C=A(T-T_r)\]
其中,\(C\)为温度补偿系数,\(A\)为常数系数,\(T\)为当前温度,\(T_r\)为参考温度。
常数系数\(A\)的值可以通过实验标定获得,其值与
测量装置的材料特性有关。
接下来,我们来看如何利用温度补偿系数对测量数据进行修正。
对于
三维测量中的坐标数据,其补偿公式为:
\[B = C \cdot S\]
其中,\(B\)为修正后的坐标数据,\(C\)为温度补偿系数,\(S\)为
原始坐标数据。
具体而言,对于三维测量中的每个坐标轴(如\(x\)、
\(y\)、\(z\)轴),都可以分别进行温度补偿,得到相应的修正坐标数据。
通过上述公式,我们就可以根据测量装置的温度变化情况来对测量数
据进行补偿,从而在一定程度上减小温度变化带来的测量误差。
需要注意的是,温度补偿算法公式中的常数系数\(A\)需要通过实验
进行标定。
实验时需要控制温度变化和测量装置的运动,记录不同温度下
的测量数据,并对数据进行分析得到合适的\(A\)的取值。
此外,温度补偿算法公式中的温度补偿系数\(C\)是一个与温度变化
呈线性关系的量,因此在实际应用中要求温度变化较小的范围内进行补偿,以保证算法的准确性。
综上所述,三坐标温度补偿算法公式是对温度变化引起的测量误差进行补偿的一种方法,通过计算温度补偿系数和修正坐标数据,可以有效减小温度变化对三维测量的影响,提高测量精度。
斜坡补偿计算
斜坡补偿是一种在电流上叠加一个固定斜坡信号的技术,主要应用在电路设计中,以提高电流内环的相位裕度,增加系统的稳定性。
斜坡补偿的计算涉及到多个参数和公式,以下是一些关键的计算步骤和考虑因素:
1.斜坡补偿斜率与电流内环相位裕度的关系:斜坡补偿的斜率(Mc)与电流内环的相位裕度(PM)
之间存在关系,可以通过公式Mc = (1 - 1/D + 1/(2D * cos(PM))) * (Vo/L)来计算,其中D是占空比,Vo是输出电压,L是电感。
这个公式说明,增大斜坡电流可以提高电流内环的相位裕度,从而增强系统的稳定性。
2.斜坡补偿的斜率选择:在实际应用中,斜坡补偿的斜率通常选择为Mc = 0.75M2,其中M2是电感
电流的下降斜率。
这个选择是为了给电路设计留下一定的裕度,保证系统的稳定性。
3.占空比的影响:占空比D对斜坡补偿的效果有重要影响。
当占空比接近0.5时,即使没有斜坡补
偿,也可能出现次谐波振荡。
因此,在占空比小于0.5时也需要进行一定的斜坡补偿。
4.重力补偿算法的应用:在机器人等设备的斜坡行走中,还需要考虑重力补偿算法。
通过测量俯仰
角和翻滚角,可以计算出沿着斜坡方向的重力分量,并通过补偿力来平衡这个重力分量,从而实现稳定行走。
需要注意的是,斜坡补偿的计算涉及到多个参数和公式,需要根据具体的应用场景和电路设计来进行调整和优化。
同时,重力补偿算法的实现也需要根据具体的设备和应用场景来进行设计和实现。
倾角横轴误差补偿算法倾角横轴误差补偿算法是一种用于测量和校正设备中倾角传感器误差的方法。
倾角传感器广泛应用于工程、建筑和导航等领域,用于测量物体或设备相对于地平面的倾斜角度。
然而,在实际应用中,倾角传感器可能会受到各种因素的影响,导致测量结果存在误差。
为了准确测量倾角,并排除误差,倾角横轴误差补偿算法被提出。
该算法通过对传感器输出的原始数据进行分析和处理,从而校正倾角测量结果。
具体来说,该算法可以通过以下几个步骤实现:1. 数据采集:首先,需要采集传感器输出的原始数据。
这些数据包含有关设备倾角的信息,但可能存在误差。
2. 数据处理:通过对原始数据进行滤波和平滑处理,可以消除由于传感器噪声和干扰引起的误差。
常用的数据处理方法包括移动平均、加权平均和卡尔曼滤波等。
3. 坐标转换:在某些情况下,传感器的安装位置可能会导致测量结果的偏差。
因此,需要进行坐标转换,将传感器输出的数据转换为设备相对于地平面的真实倾角。
4. 校准和补偿:通过与实际测量结果进行比较,可以确定传感器的误差,并进行校准和补偿。
校准可以通过调整传感器的参数或安装位置来实现,而补偿则是通过修正测量结果来消除误差。
5. 精度评估:最后,需要对校准和补偿后的测量结果进行精度评估。
可以通过与其他准确的倾角测量设备进行比较,来验证倾角横轴误差补偿算法的有效性和准确性。
总的来说,倾角横轴误差补偿算法是一种通过数据采集、处理、坐标转换、校准和补偿等步骤来消除倾角传感器误差的方法。
它可以提高倾角测量的准确性和可靠性,从而确保设备在各种应用场景下的稳定运行。
通过不断优化和改进算法,可以进一步提高倾角传感器的性能,满足不同领域的需求。
shading补偿算法
Shading补偿算法
简介
Shading补偿算法是一种用于图像处理和计算机视觉领域的技术,旨在消除由于光照不均匀或透镜畸变等因素引起的图像阴影。
该算法通过对图像进行分析和处理,自动调整图像的亮度和对比度,以达到消除阴影的效果。
本文将介绍Shading补偿算法的原理、应用和优缺点。
原理
Shading补偿算法的原理基于图像的亮度分布特征。
首先,算法通过对图像进行分析,获取图像中不同区域的亮度信息。
然后,根据亮度信息的分布情况,确定图像中存在阴影的区域。
接下来,算法根据阴影区域的亮度值和周围区域的亮度值之间的差异,计算出补偿系数。
最后,将补偿系数应用于阴影区域的像素值,使其逐渐趋近于周围区域的亮度值,从而实现阴影的消除。
应用
Shading补偿算法在计算机视觉领域有着广泛的应用。
其中,最常见的应用之一是在图像增强和图像修复领域。
通过消除图像中的阴影,Shading补偿算法可以提高图像的视觉质量和细节清晰度,使图像更加逼真和自然。
此外,该算法还可以应用于自动驾驶系统中,用于提高车辆摄像头的图像质量,从而提高车辆的感知能力和安全
性。
优缺点
Shading补偿算法具有以下优点:
1. 自动化:该算法可以自动分析图像中的阴影区域,无需人工干预,减少了人力成本和时间消耗。
2. 可靠性:通过对图像亮度分布的准确计算,该算法可以准确消除图像中的阴影,保持图像的真实性和完整性。
3. 效果显著:经过Shading补偿算法处理后的图像,阴影明显减弱或消失,细节更加清晰,视觉效果更好。
然而,Shading补偿算法也存在一些缺点:
1. 计算复杂度高:算法需要对图像进行复杂的亮度分析和计算,对计算资源要求较高。
2. 误差累积:在图像处理过程中,由于图像噪声和计算误差等因素的影响,可能会导致补偿效果不完美,甚至带来新的伪影。
总结
Shading补偿算法是一种用于消除图像阴影的有效技术。
通过对图像亮度分布的分析和处理,该算法可以自动消除图像中的阴影,提高图像的质量和视觉效果。
然而,该算法仍然面临计算复杂度高和误差累积等挑战。
未来,可以通过引入更先进的图像处理技术和优化算法,进一步改进Shading补偿算法的效果和性能,拓展其在更广泛领域的应用前景。