单自由度体系的自由振动
- 格式:ppt
- 大小:1.39 MB
- 文档页数:24

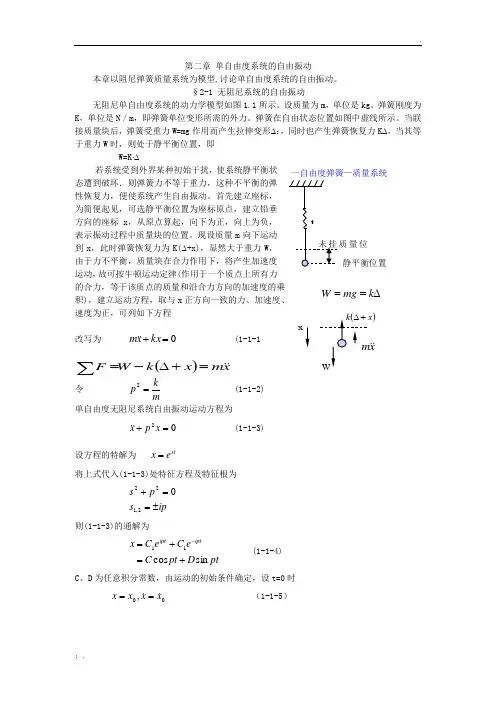
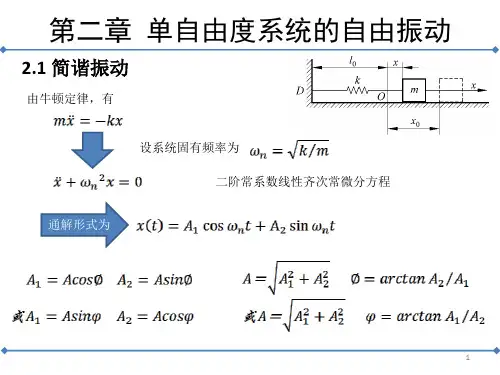
第二章 单自由度系统的自由振动本章以阻尼弹簧质量系统为模型,讨论单自由度系统的自由振动。
§2-1 无阻尼系统的自由振动无阻尼单自由度系统的动力学模型如图1.1所示。
设质量为m ,单位是kg 。
弹簧刚度为K ,单位是N /m ,即弹簧单位变形所需的外力。
弹簧在自由状态位置如图中虚线所示。
当联接质量块后,弹簧受重力W=mg 作用而产生拉伸变形∆:,同时也产生弹簧恢复力K ∆,当其等于重力W 时,则处于静平衡位置,即 W=K ⋅∆若系统受到外界某种初始干扰,使系统静平衡状态遭到破坏.则弹簧力不等于重力,这种不平衡的弹性恢复力,便使系统产生自由振动。
首先建立座标,为简便起见,可选静平衡位置为座标原点,建立铅垂方向的座标x ,从原点算起,向下为正,向上为负,表示振动过程中质量块的位置。
现设质量m 向下运动到x ,此时弹簧恢复力为K(∆+x),显然大于重力W ,由于力不平衡,质量块在合力作用下,将产生加速度运动,故可按牛顿运动定律(作用于一个质点上所有力的合力,等于该质点的质量和沿合力方向的加速度的乘积),建立运动方程,取与x 正方向一致的力、加速度、速度为正,可列如下方程 改写为 0=+kx xm (1-1-1 令mkp =2(1-1-2)单自由度无阻尼系统自由振动运动方程为02=+x p x(1-1-3)设方程的特解为 ste x =将上式代入(1-1-3)处特征方程及特征根为ips p s ±==+2,1220则(1-1-3)的通解为ptD pt C e C e C x ipt ipt sin cos 11+=+=- (1-1-4)C 、D 为任意积分常数,由运动的初始条件确定,设t=0时00,x xx x == (1-1-5)()x m x k W F=+∆-=∑量位静平衡位置 一自由度弹簧—质量系统 ∆==k mgW xx)则pt pxpt x x sin cos 00 += (1-1-6)经三角变换,又可表示为)sin(α+=pt A x(1-1-7)其中 001220,x px tg p x x A -=⎪⎪⎭⎫ ⎝⎛+=α (1-1-8) 自由振动的振幅A 和初相位角α与系统的参数和初始条件有关。

单自由度体系(Single Degree of Freedom System, SDOF)是工程动力学中的一个重要概念,它对于描述系统的振动特性有着重要的作用。
在自由振动过程中,速度相位与位移相位之间存在着密切的关系。
本文将从单自由度体系自由振动的基本原理入手,探讨速度相位与位移相位之间的关系,希望通过本文的介绍,读者能够对这一问题有更加清晰的认识。
一、单自由度体系自由振动的基本原理1. 自由振动的基本概念自由振动是指在没有外界干扰的情况下,系统在一定的初位移或初速度作用下,由于其自身的惯性和弹性特性而产生的振动现象。
在工程领域中,自由振动是一种非常常见的振动形式,因此研究自由振动对于工程设计和分析有着重要的意义。
2. 单自由度体系的定义单自由度体系是指系统中只有一个自由度可以自由变化的体系。
在动力学领域中,单自由度体系被广泛应用于描述各种机械、土木和航空航天结构的振动特性。
它是一种简化模型,但对于许多实际工程问题的分析具有较高的适用性。
3. 自由振动的基本方程单自由度体系的自由振动可以通过一阶微分方程来描述。
其基本方程可以表示为:\[m\ddot{x}+c\dot{x}+kx=0\]其中,\(m\)为系统的质量,\(c\)为系统的阻尼系数,\(k\)为系统的刚度,\(x\)为系统的位移函数,\(t\)为时间。
二、速度相位与位移相位的定义1. 速度相位的定义在振动过程中,速度相位是指速度\(v\)相对于位移\(x\)的相位差。
通常用一个角度来表示,它可以用来描述振动的快慢和超前滞后关系。
2. 位移相位的定义位移相位是指位移\(x\)相对于某一固定参考点的相位差。
它也通常用一个角度来表示,可以用来描述振动的相对位置。
三、速度相位与位移相位的关系速度相位与位移相位之间存在着密切的关系。
在自由振动过程中,它们之间满足以下关系:\[tan(\phi_v-\phi_x)=\frac{2\zeta}{1-\omega^2}\]其中,\(\phi_v\)为速度相位,\(\phi_x\)为位移相位,\(\zeta\)为系统的阻尼比,\(\omega\)为系统的固有频率。

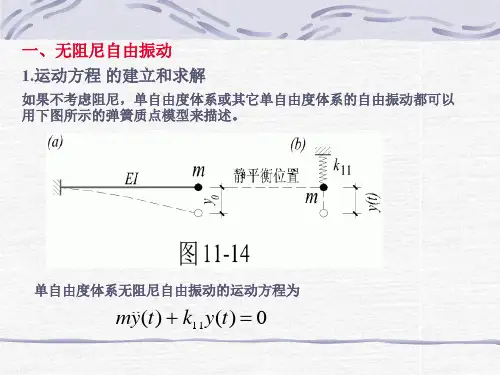
单自由度体系自由振动一、无阻尼振动单自由度体系自由振动可分为有阻尼和无阻尼振动两种。
在模型建立过程当中,可以直接进行建立。
在运行时,只需将c=0即可。
ω增加,单位时间内振动次数增加。
无阻尼振动是简谐振动,振幅和初相位仅取决于初位移和速度。
初始干扰反映了外部初始赋予体系能量的大小。
由于不考虑振动过程中体系能量的耗散,因而体系的总能量保持不变,这就表现为振幅A保持不变,永不衰减。
于是振动一旦发生便永不停息,但这仅是一种理想状态。
二、对阻尼自由振动的讨论当阻尼系数c不为0时,体系做阻尼运动。
由于有能量的耗散,体系的运动幅度会逐渐减小,最终停止振动。
有阻尼单自由度体系,自由振动的运动方程为ωξωm c m k t ky t y c t y m 2,0)()()(2===++∙∙∙, 则原式可变为022=++∙∙∙ωξωy y 。
解微分方程有如下结果:2.1 当1<ξ时,即小阻尼运动,方程的解为:)sin(A )sin cos ()(000ϕωωωξωωξωξω+=++=--t e t y v t y e t y d t d d d t 其中2200201)(ξωωωξω-=++=d d y v y A可画出小阻尼体系自由振动时的y-t曲线如图所示:是一条逐渐衰减的波动曲线2.2 当1>ξ时,即大阻尼的情况,方程的解为:⎥⎥⎦⎤⎢⎢⎣⎡-+--+=-t ch y t sh v y e t y o t ωξωξξξωωξ11)1()(20220 上式不含有简谐振动的因子,是因为体系受干扰后偏离平衡位置所积蓄起来的初始能量在恢复平衡位置的过程中全部消耗克服阻尼,由于阻尼很大,不足以引起振动。
当初始速度,初始位移都大于0时,可画出大阻尼体系自由振动时的y-t曲线如图所示:2.3 当1=ξ时,即临界阻尼的情况,方程的解为:[]t v t y e t y t 00)1)(++=-ωω(当初始速度,初始位移都大于0时,可画出临界阻尼体系自由振动时的y-t曲线如下图所示;当体系在临界阻尼时,其运动衰减的最快,即他能在最短时间内无振动的回到平衡位置。
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。