根轨迹绘制的基本原则
- 格式:doc
- 大小:50.50 KB
- 文档页数:1
自动控制原理根轨迹法总结
【根轨迹法概述】
-根轨迹法是分析线性时不变系统稳定性和动态性能的一个重要工具。
它通过在复平面上绘制闭环极点随系统参数变化的轨迹来实现。
【根轨迹法的基本原理】
1. 定义与目的:
-根轨迹是系统开环增益变化时,闭环极点在s平面上的轨迹。
-主要用于分析系统稳定性和设计控制器参数。
2. 绘制原则:
-根据系统开环传递函数,确定轨迹的起点和终点,分支点,穿越虚轴的点等。
-利用角度判据和幅值判据确定根轨迹。
【根轨迹法的应用】
1. 系统稳定性分析:
-根据闭环极点的位置判断系统的稳定性。
-极点在左半平面表示系统稳定,右半平面表示不稳定。
2. 控制器设计:
-调整控制器参数(如比例增益、积分时间常数、微分时间常数等),使根轨迹满足性能指标要求。
-确定合适的开环增益,使闭环系统具有期望的动态性能和稳定裕度。
【根轨迹法的优势与局限性】
-优势:直观、便于分析系统特性,特别是在控制器设计中。
-局限性:仅适用于线性时不变系统,对于非线性或时变系统不适用。
【实践中的注意事项】
-在绘制根轨迹时,应仔细考虑系统所有极点和零点的影响。
-必须结合其他方法(如奈奎斯特法、波特法等)进行综合分析。
【结语】
-根轨迹法是自动控制领域中一种非常有效的工具,对于理解和设计复杂控制系统具有重要意义。
-掌握根轨迹法,能够有效地指导实际的控制系统设计和分析。
编制人:_____________________
日期:_____________________。
简述绘制根轨迹的规则
1.确定系统的传递函数,通常为开环传递函数。
2. 求出传递函数的特征方程,并确定系统的极点和零点。
3. 根据特征方程的根的实部和虚部的符号,确定根轨迹的起点
和方向。
实部为负时,起点在左侧无穷远点;实部为正时,起点在右侧无穷远点。
如果有根在虚轴上,起点在最靠近虚轴的点。
4. 根据特征方程的根的虚部和实部的大小,确定根轨迹的曲线
形状。
虚部相同时,曲线形状取决于实部的大小。
实部相同时,曲线形状取决于虚部的大小。
5. 根据系统的零点,确定根轨迹离开或逼近的方向。
如果零点
是实数,离开或逼近方向与实轴上的零点位置有关。
如果零点是虚数,离开或逼近方向与虚轴上的零点位置有关。
6. 根据根轨迹的数量和方向,确定系统的稳定性和性能。
在根
轨迹穿过虚轴时,系统发生振荡。
在根轨迹趋近无穷远点时,系统响应速度较慢,稳定性较好。
绘制根轨迹需要一定的数学基础和图像分析能力。
在实际应用中,通常使用计算机软件进行绘制和分析。
- 1 -。
绘制根轨迹的基本原则绘制根轨迹是控制工程中常用的一种方法,它可以帮助我们分析系统的稳定性,相当于一个工程师的眼睛。
根轨迹是由根的轨迹组成的,而系统的根是指其特征方程的根。
特征方程是由系统的传递函数确定的,因此我们可以通过绘制特征方程的根轨迹来分析系统的动态性态。
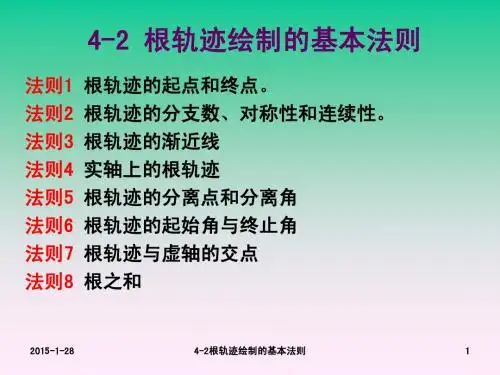
绘制根轨迹的基本原则有以下几点。
1. 系统根轨迹的数量等于系统特征方程的根的数量。
这是因为每个根对应着系统中一个极点。
2. 根轨迹的起点和终点都在实轴上。
这是因为特征方程的根只有实数或成对的共轭复数根。
3. 根轨迹要从左侧的极点开始。
如果存在多个极点,则从最左侧的极点开始。
如果没有极点,则从传递函数的实轴交点开始。
4. 根轨迹要向右边的极点或者方向稳定,如果两个虚根前后交叉,则会出现不稳定性。
在解决此问题是,需要重新绘制,或者调整参数,使出现前后交叉的根跑到不相交的区域。
5. 当相邻两根的虚部相等时,其插值点在实轴上。
这个时候,由于两个根的插值点处于实轴上,因此根轨迹向这个点的方向发生了变化。
6. 根轨迹需要跨越系统的实轴部分。
无论极点的数量、位置以及根轨迹的线路,都必须穿过右半平面。
7. 根轨迹的末端,必须落到无限远点。
<1>{1}</1>因此,通过这几个基本原则,我们可以绘制出系统的根轨迹。
然而,在实际的工程中,我们会遇到许多不同的情况,例如系统传递函数变化、加入控制器等。
这时候,我们需要灵活应对,对基本原则进行微调,以便更好地分析系统的动态特性。
总结来说,根轨迹能够帮助工程师更好地了解控制系统的动态特性,这有助于他们进行有效的控制和优化。
在绘制根轨迹的过程中,需要严格遵循基本原则,同时对特殊情况进行灵活调整。
绘制零度根轨迹的8条法则绘制零度根轨迹的8条法则是控制系统理论中的重要概念,用于预测系统的根轨迹。
根轨迹是描述系统极点在复平面上运动的轨迹,对于开环稳定的连续时间系统,绘制根轨迹可以帮助设计者了解系统的稳定性、动态性能和调节器的参数调整等信息。
下面将详细介绍绘制零度根轨迹的八条法则。
1.根轨迹的起始点:零度根轨迹的起始点是系统零极点的交点,也就是系统传递函数的分子多项式与分母多项式的公共根。
起始点数目等于系统的零极点差异的绝对值。
如果起始点是虚数根,则起始点垂直于虚轴;如果起始点是实数根,则起始点沿着实轴移动。
2.根轨迹的末端点:根轨迹的末端点是极点的交点,也就是系统传递函数的分母多项式的根。
末端点数目等于系统的极点数目。
3.根轨迹的关于虚轴和实轴的对称性:零度根轨迹关于虚轴和实轴是对称的。
如果零度根轨迹中有一个点在复平面上,则它的共轭点也在轨迹上。
4.根轨迹的角度特征:根轨迹趋近虚轴的角度特征取决于系统的零和极点之间的差异。
如果零点在极点的左侧,则根轨迹的角度在趋近虚轴时是奇数个180度。
如果零点在极点的右侧,则根轨迹的角度在趋近虚轴时是偶数个180度。
5.根轨迹的交点:当根轨迹与实轴或虚轴相交时,可以通过零点数目和交点的位置来确定系统的稳定性。
如果实轴上的交点数目为奇数,则系统不稳定。
如果虚轴上的交点数目为奇数,则系统是无法稳定的。
6.根轨迹的穿越特征:根轨迹可以穿越实轴或虚轴。
如果根轨迹穿越实轴,则必须有一个零点或极点位于实轴上。
如果根轨迹穿越虚轴,则必须有一个零点或极点位于虚轴上。
7.根轨迹的极点规律:根轨迹的极点位置取决于系统的极点位置。
当系统的极点靠近时,根轨迹的极点会趋向于其中一个极点。
当系统的极点远离时,根轨迹的极点会趋向于无穷远。
8.根轨迹的环绕特征:当根轨迹环绕其中一极点的次数等于该极点的倍数时,被环绕的极点是系统的稳定极点。
根轨迹环绕的次数与稳定电路发生变号的次数相同。