绘制根轨迹的基本法则
- 格式:pdf
- 大小:232.78 KB
- 文档页数:11
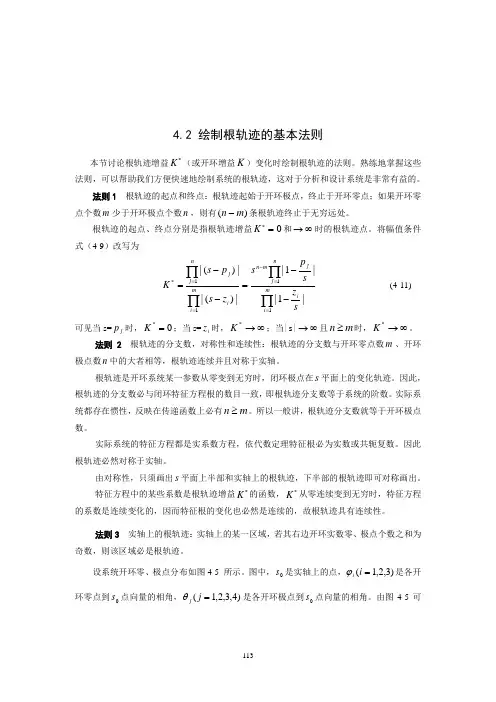
4.2 绘制根轨迹的基本法则本节讨论根轨迹增益*K (或开环增益K )变化时绘制根轨迹的法则。
熟练地掌握这些法则,可以帮助我们方便快速地绘制系统的根轨迹,这对于分析和设计系统是非常有益的。
法则1 根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环零点个数m 少于开环极点个数n ,则有)(m n -条根轨迹终止于无穷远处。
根轨迹的起点、终点分别是指根轨迹增益0=*K 和∞→时的根轨迹点。
将幅值条件式(4-9)改写为∏∏∏∏==-==--=--=mi inj j mn m i i nj jsz sp sz s ps K 1111*|1||1||)(||)(|(4-11)可见当s=j p 时,0*=K ;当s=i z 时,∞→*K ;当|s|∞→且m n ≥时,∞→*K 。
法则2 根轨迹的分支数,对称性和连续性:根轨迹的分支数与开环零点数m 、开环极点数n 中的大者相等,根轨迹连续并且对称于实轴。
根轨迹是开环系统某一参数从零变到无穷时,闭环极点在s 平面上的变化轨迹。
因此,根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。
实际系统都存在惯性,反映在传递函数上必有m n ≥。
所以一般讲,根轨迹分支数就等于开环极点数。
实际系统的特征方程都是实系数方程,依代数定理特征根必为实数或共轭复数。
因此根轨迹必然对称于实轴。
由对称性,只须画出s 平面上半部和实轴上的根轨迹,下半部的根轨迹即可对称画出。
特征方程中的某些系数是根轨迹增益*K 的函数,*K 从零连续变到无穷时,特征方程的系数是连续变化的,因而特征根的变化也必然是连续的,故根轨迹具有连续性。
法则3 实轴上的根轨迹:实轴上的某一区域,若其右边开环实数零、极点个数之和为奇数,则该区域必是根轨迹。
设系统开环零、极点分布如图4-5 所示。
图中,0s 是实轴上的点,)3,2,1(=i i ϕ是各开环零点到0s 点向量的相角,)4,3,2,1(=j j θ是各开环极点到0s 点向量的相角。
简述绘制根轨迹的规则
1.确定系统的传递函数,通常为开环传递函数。
2. 求出传递函数的特征方程,并确定系统的极点和零点。
3. 根据特征方程的根的实部和虚部的符号,确定根轨迹的起点
和方向。
实部为负时,起点在左侧无穷远点;实部为正时,起点在右侧无穷远点。
如果有根在虚轴上,起点在最靠近虚轴的点。
4. 根据特征方程的根的虚部和实部的大小,确定根轨迹的曲线
形状。
虚部相同时,曲线形状取决于实部的大小。
实部相同时,曲线形状取决于虚部的大小。
5. 根据系统的零点,确定根轨迹离开或逼近的方向。
如果零点
是实数,离开或逼近方向与实轴上的零点位置有关。
如果零点是虚数,离开或逼近方向与虚轴上的零点位置有关。
6. 根据根轨迹的数量和方向,确定系统的稳定性和性能。
在根
轨迹穿过虚轴时,系统发生振荡。
在根轨迹趋近无穷远点时,系统响应速度较慢,稳定性较好。
绘制根轨迹需要一定的数学基础和图像分析能力。
在实际应用中,通常使用计算机软件进行绘制和分析。
- 1 -。
根轨迹基本法则
根轨迹基本法则是指描述系统根轨迹的一些基本规律和性质。
以下是根轨迹基本法则的几个方面:
1. 根轨迹的数量:系统的根轨迹的数量等于系统开环传递函数的极点数目。
2. 根轨迹的起点和终点:系统的根轨迹始于开环传递函数的极点,终于开环传递函数的零点。
3. 根轨迹在实轴上的分布:系统的根轨迹在实轴上的分布与开环传递函数的极点有关。
具体规律为,对于系统的每个开环传递函数的极点,根轨迹在实轴上的分布有一个部分位于左侧,一个部分位于右侧,并且左侧的根轨迹数量减去右侧的根轨迹数量等于极点的数量。
4. 根轨迹的稳定性:系统的根轨迹稳定性与开环传递函数的极点有关。
如果系统的开环传递函数的极点都位于左半平面(实轴的左侧),则根轨迹是稳定的;如果系统的开环传递函数存在极点位于右半平面(实轴的右侧),则根轨迹是不稳定的。
5. 根轨迹的方向:根轨迹通常从一个极点开始,然后按照一定方向延伸。
具体方向取决于开环传递函数的极点和零点的相对位置。
总的来说,根轨迹基本法则描述了系统的根轨迹的数量、起点和终
点、在实轴上的分布、稳定性和方向等基本性质。
这些规律可以帮助我们分析和设计控制系统的稳定性和动态性能。
绘制零度根轨迹的8条法则绘制零度根轨迹的8条法则是控制系统理论中的重要概念,用于预测系统的根轨迹。
根轨迹是描述系统极点在复平面上运动的轨迹,对于开环稳定的连续时间系统,绘制根轨迹可以帮助设计者了解系统的稳定性、动态性能和调节器的参数调整等信息。
下面将详细介绍绘制零度根轨迹的八条法则。
1.根轨迹的起始点:零度根轨迹的起始点是系统零极点的交点,也就是系统传递函数的分子多项式与分母多项式的公共根。
起始点数目等于系统的零极点差异的绝对值。
如果起始点是虚数根,则起始点垂直于虚轴;如果起始点是实数根,则起始点沿着实轴移动。
2.根轨迹的末端点:根轨迹的末端点是极点的交点,也就是系统传递函数的分母多项式的根。
末端点数目等于系统的极点数目。
3.根轨迹的关于虚轴和实轴的对称性:零度根轨迹关于虚轴和实轴是对称的。
如果零度根轨迹中有一个点在复平面上,则它的共轭点也在轨迹上。
4.根轨迹的角度特征:根轨迹趋近虚轴的角度特征取决于系统的零和极点之间的差异。
如果零点在极点的左侧,则根轨迹的角度在趋近虚轴时是奇数个180度。
如果零点在极点的右侧,则根轨迹的角度在趋近虚轴时是偶数个180度。
5.根轨迹的交点:当根轨迹与实轴或虚轴相交时,可以通过零点数目和交点的位置来确定系统的稳定性。
如果实轴上的交点数目为奇数,则系统不稳定。
如果虚轴上的交点数目为奇数,则系统是无法稳定的。
6.根轨迹的穿越特征:根轨迹可以穿越实轴或虚轴。
如果根轨迹穿越实轴,则必须有一个零点或极点位于实轴上。
如果根轨迹穿越虚轴,则必须有一个零点或极点位于虚轴上。
7.根轨迹的极点规律:根轨迹的极点位置取决于系统的极点位置。
当系统的极点靠近时,根轨迹的极点会趋向于其中一个极点。
当系统的极点远离时,根轨迹的极点会趋向于无穷远。
8.根轨迹的环绕特征:当根轨迹环绕其中一极点的次数等于该极点的倍数时,被环绕的极点是系统的稳定极点。
根轨迹环绕的次数与稳定电路发生变号的次数相同。