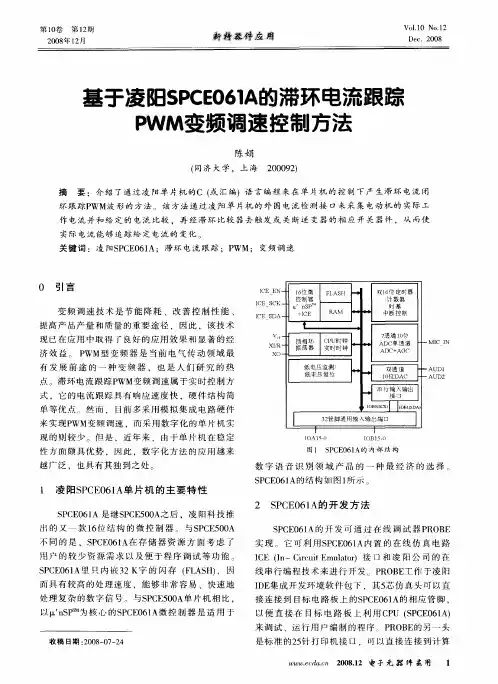
基于单片机控制的电流滞环比较PWM整流器
- 格式:pdf
- 大小:228.81 KB
- 文档页数:3
本科毕业论文(设计)文献综述题目:直流电机调速的研究现状及发展趋势姓名:杨林学院(部):信息与工程学院专业:生物医学工程班级:生物医学工程 1 班学号: 0903030027 指导教师:张鑫职称:2012年10月25日直流电机调速的研究现状及发展趋势摘要:本文阐述了直流电机调速控制系统的发展情况,首先包括各种直流电机的调速方式介绍,再到从单一的调速加入单片机的控制、转速的采集和显示器显示转速等方式来实现实时调控,以及国内外各个高校及专业人员就自己擅长的方面进行探索并取得一定的研究成果。
其次具体讲述了各种调速调速系统中的一些关键模块,如:单片机控制、PWM脉冲如何产生、如何改变PWM脉冲占空比调速、如何改变电阻调速、如何采集转速和显示等等,最后浅谈一下各模块中的优异和可以采取的改进方法,以及当下比较适宜的处理办法。
关键词:单片机;调速;直流电机Dc motor speed regulating research situation anddevelopment trendAbstract: this paper describes the situation of the DC motor speed regulation control system development , Firstly , it includes all kinds of the DC motor speed control mode is introduced,and then from a single speed to join MCU control, the speed of the acquisition .The display shows speed, and other ways to realize real-time control, and domestic and foreign various colleges and universities and professional personnel is good at aspects of exploration and obtained a certain research results. Secondly, the paper specificly say about all kinds of speed governing system of some key modules, such as: MCU control, how to PWM pulse produce, and how to change the PWM pulse duty ratio control, how to change the resistance of motor speed, how to gather the speed and display, and so on,.Finally talk about how each module of the excellent and can take improvement methods, as well as the suitable processing method.Keywords: MCU; Speed control; Dc motor引言现在电气传动的主要方向之一是电机调速系统采用微处理器实现数字化控制,随着现代化生产规模的不断扩大,各个行业对直流电机的需求愈益增大,并对其性能提出了更高的要求。
PWM整流器是什么?及PWM整流器控制原理电子元器件是推动国民经济发展的重要因素之一,然而在这个电子科技技术日新月异的时代,消费者对电子类的产品需求更是呈现出的多元化发展趋势,同时产品对电子元器件的性能有了更高的要求。
而作为被广泛应用的PWM整流器也不例外。
那么什么是PWM整流器?及PWM整流器控制原理是什么?华强北IC代购网为你一一解答。
PWM整流器是什么随着功率半导体开关器件技术的进步,电力电子变流装置得到飞速的发展,从而衍生出了以脉宽调制(PWM)为基础的各类变流装置,例如变频器、逆变电源、高频开关电源等。
经过几十年的研究与发展,PWM整流器技术已日趋成熟。
根据其能量是否可双向流动从而派生出可逆PWM整流器和不可逆PWM整流器;而其拓扑结构从最初的单向、三相电路发展到多相组合以及多电平拓扑电路;在控制开关方面,软开关调制逐渐开始代替单纯的硬开关调制;其功率等级从千瓦级发展到兆瓦级。
PWM整流器基本控制原理PWM整流器的控制目标有两个:一是使直流侧输出电压稳定;二是使交流侧输入功率因数为1或可控。
为了方便大家查阅,华强北IC代购网对PWM整流器基本控制原理归纳出以下几点:1、直接电流控制依据PWM整流器的动态方程,直接电流可对瞬时电流的波形进行高精度的控制,具有很好的动态性能,并且能够有效的防止过载和实现过流保护。
另一方面,直接电流控制对PWM整流器的控制都是采用双向闭环控制,通过直流母线电压的调节得到交流电流的电值,从而达到减小误差和产生调制的作用。
优点:良好的动态性能、高精度、低误差。
2、间接电流控制间接电流控制也成为幅相控制,通过控制整流桥交流侧击波电压的幅度值达到控制输入PWM整流器电流的目的。
与直接电流控制不一样,间接电流控制是通过开环实现对输入电流进行控制。
优点:成本低、结构简单;缺点:较大电流超调、电流震荡剧烈。
3、预测电流控制预测电流控制其本质就是采用模型误差反馈校正,根据PWM整流器实际电流的误差和电路参数等信息,计算出合适的电压矢量。
智能仪表综合训练设计说明书题目:基于单片机的PWM输出控制学生姓名:学号:专业:班级:指导教师:摘要随着电子技术及微控制器(MCU)的快速发展,自动控制技术在工业领域应用十分广泛。
许多设备之间的连接或者控制都是由标准的1~5V的电压信号或者4~20mA的电流信号来完成的。
一般设备的D/A转换都是采用集成的数模转换器,这样就增加了成本,所以为了降低成本,利用单片机内部的定时器和软件一起来实现PWM 输出,经过简单的变换电路就以实现D/A转换。
本次设计,就是基于单片机的PWM输出控制,通过RC硬件电路,采用定时器配合软件的方法实现占空比可调、周期固定的PWM输出控制,大致过程:利用电位器实现占空比的改变,并通过AD转换,将PWM方波的占空比送入LED进行显示。
然后,将给定占空比生成的PWM 波形被输入到一个低通滤波器,即将输入的数字信号转换为模拟信号,然后去控制LED灯的渐变。
关键词:单片机;脉宽调制;A/D转换器;LED显示目录第一章脉冲宽度调制概述 (1)1.1 PWM控制的原理及过程 (1)1.1.1 PWM控制的基本原理 (1)1.1.2 PWM的控制过程 (2)1.2 PWM控制的特点及应用 (2)第二章总体方案设计 (4)2.1 系统总体的设计思路 (4)第三章硬件设计 (6)3.1 STC89C52单片机及控制电路 (6)3.1.1 STC89C52单片机简介 (6)3.1.2 单片机时钟和复位电路的设计 (7)3.2 基于单片机PWM输出控制系统的硬件电路的分析与设计 (9)3.2.1 电源电路的分析与设计 (9)3.2.2 MAX232芯片与RS232接口电路 (10)3.2.3 ADC0832与 A/D转换电路 (11)3.2.4 LED显示电路 (14)第四章软件设计 (17)4.1程序流程图及程序设计 (17)4.1.1 主程序设计 (17)4.1.2 A/D转换程序设计 (17)4.1.3 PWM控制程序设计 (18)第五章总结 (19)参考文献 (20)附录A:基于单片机的PWM输出控制的硬件原理图 (21)附录B:基于单片机的PWM输出控制的源程序 (22)第一章脉冲宽度调制概述脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
摘要本文介绍了用PWM实现直流电机调整的基本方法。
本文在给出直流电机调整和PWM实现方法的基础上,提供一种用单片机软件实现PWM调速的方法,以及直流电机调速的相关知识和PWM调整的基本原理和实现方法.介绍了基于MCS-51单片机用软件产生PWM信号的途径,在给出直流电机调整的实现方法的基础上,提供一种用单片机软件实现调速的方法。
系统以8051单片机为核心,以小直流电机为控制对象,实现速度单闭环、PID控制.方便的人机对话接口,用键盘输入有关控制信号及参数,可以实现电机的启制动、正反转、速度调节.并在LED上实时显示输入参数及动态转速.详细给出调速系统的主电路原理图及各部分电路原理图,主要包括MCS-51电路,电源,键盘和显示电路,驱动电路,最后画出程序流程图.关键词:MCS-51;PWM;硬件;直流电机ABSTRACTThe paper introduces a basic kind of method of DC-motor speed modification based on PWM theory. Showing some relative knowledge upon DC motor speed modification, the PWM theory and the way to implement. It emphasizes on the way for carrying out PWM signals based on MCS-51. Taking 8051 Single Chip Micyoco as core and the little direct current motor as control object, the single closed loop speed control and PID control were realized. In the convenient man-machine interaction interface,the control signal and parameter were inputted with keybaord.so that the start and brake of motor and speed regulation were also realized. Provided main electric circuit principle diagram and each parts of electric circuit principle diagram, mainly include electric circuits MCS-51s, power supplies, keyboard and manifestation electric circuit, drive electric circuit, draw a procedure flow chart finally.Keyword: MCS-51 ;PWM ;Hardware ;DC Motor目录摘要.......................................................... I ABSTRACT ........................................................ I I 1 绪论.. (1)1.1课题研究的背景及意义 (1)1.2PWM整流电源发展概况 (1)1.3本课题的来源,研究意义和研究目标 (2)2 PWM整流技术的现状 (3)2.1PWM整流研究概述 (3)2.2PWM整流的基本原理 (5)3 核心芯片的选择 (10)3.1单片机的发展概况 (10)3.2基于单片机控制的特点 (11)3.3MCS-51单片机特点 (12)4系统的硬件电路设计 (13)4.1系统总体框图 (13)4.1.1系统总体设计框图 (13)4.1.2 系统主回路电路图 (14)4.2元件的选择 (15)4.2.1 单片机的选型AT89C51 (15)4.2.2 IGBT介绍 (17)4.2.3 EXB841控制的IGBT (20)4.2.4 8255芯片及功能图 (22)4.2.5 ADC0809芯片及功能图 (23)4.2.6 DAC0832模数转换器的介绍 (25)4.2.7 LED显示屏的介绍 (27)4.3系统外围电路及开关稳压电源 (28)4.3.1 单片机外围电路连接图 (28)4.3.2 开关式稳压电源的原理电路 (28)4.4本系统过流保护 (29)4.5单片机抗干扰措施 (29)5 系统的软件设计简介 (32)5.1设计流程图及程序 (32)5.1.1系统主流程图 (32)5.1.2 系统主程序 (32)5.2按键流程图及程序 (34)5.2.1按键判断流程图 (34)5.2.2 按键子程序 (34)5.38279可编程键盘及键盘扫描程序 (36)5.3.1 8279是一种通用可编程键盘 (36)5.3.2键盘扫描程序 (37)5.4控制和显示界面的实现 (40)5.4.1显示子程序流程图 (40)5.4.2显示器程序 (40)5.5驱动8255连接ADC0809的采样程序 (42)5.6其它子程序 (43)6 总结 (45)致谢 (46)参考文献 (47)附录A (48)附录B (50)江西理工大学应用科学学院毕业设计1 绪论1.1课题研究的背景及意义功率半导体开关器件的进步,促进了电力电子变流技术的迅速发展,出现了各类变流装置,如变频器、逆变电源、励磁电源、高频开关电源以及各类特种整流器等,它们在国民经济各领域中取得了广泛应用。
几种PWM控制方法采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同.PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形.按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率.PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现.直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用.随着电力电子技术,微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论,非线性系统控制思想的应用,PWM控制技术获得了空前的发展.到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法.1 .相电压控制PWM1.1 等脉宽PWM法[1]VVVF(Variable Voltage Variable Frequency)装置在早期是采用PAM(Pul se Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压.等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种.它是把每一脉冲的宽度均相等的脉冲列作为PWM 波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化.相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量.1.2 随机PWM在上世纪70年代开始至上世纪80年代初,由于当时大功率晶体管主要为双极性达林顿三极管,载波频率一般不超过5kHz,电机绕组的电磁噪音及谐波造成的振动引起了人们的关注.为求得改善,随机PWM方法应运而生.其原理是随机改变开关频率使电机电磁噪音近似为限带白噪声(在线性频率坐标系中,各频率能量分布是均匀的),尽管噪音的总分贝数未变,但以固定开关频率为特征的有色噪音强度大大削弱.正因为如此,即使在IGBT已被广泛应用的今天,对于载波频率必须限制在较低频率的场合,随机PWM仍然有其特殊的价值;另一方面则说明了消除机械和电磁噪音的最佳方法不是盲目地提高工作频率,随机PWM技术正是提供了一个分析,解决这种问题的全新思路.1.3 SPWM法SPWM(Sinusoidal PWM)法是一种比较成熟的,目前使用较广泛的PWM法.前面提到的采样控制理论中的一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同.SPWM法就是以该结论为理论基础,用脉冲宽度按正弦规律变化而和正弦波等效的PWM波形即SPWM波形控制逆变电路中开关器件的通断,使其输出的脉冲电压的面积与所希望输出的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电压的频率和幅值.该方法的实现有以下几种方案.1.3.1 等面积法该方案实际上就是SPWM法原理的直接阐释,用同样数量的等幅而不等宽的矩形脉冲序列代替正弦波,然后计算各脉冲的宽度和间隔,并把这些数据存于微机中,通过查表的方式生成PWM信号控制开关器件的通断,以达到预期的目的.由于此方法是以SPWM控制的基本原理为出发点,可以准确地计算出各开关器件的通断时刻,其所得的的波形很接近正弦波,但其存在计算繁琐,数据占用内存大,不能实时控制的缺点.1.3.2 硬件调制法硬件调制法是为解决等面积法计算繁琐的缺点而提出的,其原理就是把所希望的波形作为调制信号,把接受调制的信号作为载波,通过对载波的调制得到所期望的PWM波形.通常采用等腰三角波作为载波,当调制信号波为正弦波时,所得到的就是SPWM波形.其实现方法简单,可以用模拟电路构成三角波载波和正弦调制波发生电路,用比较器来确定它们的交点,在交点时刻对开关器件的通断进行控制,就可以生成SPWM波.但是,这种模拟电路结构复杂,难以实现精确的控制.1.3.3 软件生成法由于微机技术的发展使得用软件生成SPWM波形变得比较容易,因此,软件生成法也就应运而生.软件生成法其实就是用软件来实现调制的方法,其有两种基本算法,即自然采样法和规则采样法.1.3.3.1 自然采样法[2]以正弦波为调制波,等腰三角波为载波进行比较,在两个波形的自然交点时刻控制开关器件的通断,这就是自然采样法.其优点是所得SPWM波形最接近正弦波,但由于三角波与正弦波交点有任意性,脉冲中心在一个周期内不等距,从而脉宽表达式是一个超越方程,计算繁琐,难以实时控制.1.3.3.2 规则采样法[3]规则采样法是一种应用较广的工程实用方法,一般采用三角波作为载波.其原理就是用三角波对正弦波进行采样得到阶梯波,再以阶梯波与三角波的交点时刻控制开关器件的通断,从而实现SPWM法.当三角波只在其顶点(或底点)位置对正弦波进行采样时,由阶梯波与三角波的交点所确定的脉宽,在一个载波周期(即采样周期)内的位置是对称的,这种方法称为对称规则采样.当三角波既在其顶点又在底点时刻对正弦波进行采样时,由阶梯波与三角波的交点所确定的脉宽,在一个载波周期(此时为采样周期的两倍)内的位置一般并不对称,这种方法称为非对称规则采样.规则采样法是对自然采样法的改进,其主要优点就是是计算简单,便于在线实时运算,其中非对称规则采样法因阶数多而更接近正弦.其缺点是直流电压利用率较低,线性控制范围较小.以上两种方法均只适用于同步调制方式中.1.3.4 低次谐波消去法[2]低次谐波消去法是以消去PWM波形中某些主要的低次谐波为目的的方法.其原理是对输出电压波形按傅氏级数展开,表示为u(ωt)=ansinnωt,首先确定基波分量a1的值,再令两个不同的an=0,就可以建立三个方程,联立求解得a1,a2及a 3,这样就可以消去两个频率的谐波.该方法虽然可以很好地消除所指定的低次谐波,但是,剩余未消去的较低次谐波的幅值可能会相当大,而且同样存在计算复杂的缺点.该方法同样只适用于同步调制方式中.1.4 梯形波与三角波比较法[2]前面所介绍的各种方法主要是以输出波形尽量接近正弦波为目的,从而忽视了直流电压的利用率,如SPWM法,其直流电压利用率仅为86.6%.因此,为了提高直流电压利用率,提出了一种新的方法--梯形波与三角波比较法.该方法是采用梯形波作为调制信号,三角波为载波,且使两波幅值相等,以两波的交点时刻控制开关器件的通断实现PWM控制.由于当梯形波幅值和三角波幅值相等时,其所含的基波分量幅值已超过了三角波幅值,从而可以有效地提高直流电压利用率.但由于梯形波本身含有低次谐波,所以输出波形中含有5次,7次等低次谐波.2 .线电压控制PWM前面所介绍的各种PWM控制方法用于三相逆变电路时,都是对三相输出相电压分别进行控制的,使其输出接近正弦波,但是,对于像三相异步电动机这样的三相无中线对称负载,逆变器输出不必追求相电压接近正弦,而可着眼于使线电压趋于正弦.因此,提出了线电压控制PWM,主要有以下两种方法.2.1 马鞍形波与三角波比较法马鞍形波与三角波比较法也就是谐波注入PWM方式(HIPWM),其原理是在正弦波中加入一定比例的三次谐波,调制信号便呈现出马鞍形,而且幅值明显降低,于是在调制信号的幅值不超过载波幅值的情况下,可以使基波幅值超过三角波幅值,提高了直流电压利用率.在三相无中线系统中,由于三次谐波电流无通路,所以三个线电压和线电流中均不含三次谐波[4].除了可以注入三次谐波以外,还可以注入其他3倍频于正弦波信号的其他波形,这些信号都不会影响线电压.这是因为,经过PWM调制后逆变电路输出的相电压也必然包含相应的3倍频于正弦波信号的谐波,但在合成线电压时,各相电压中的这些谐波将互相抵消,从而使线电压仍为正弦波.2.2 单元脉宽调制法[5]因为,三相对称线电压有Uuv+Uvw+Uwu=0的关系,所以,某一线电压任何时刻都等于另外两个线电压负值之和.现在把一个周期等分为6个区间,每区间60°,对于某一线电压例如Uuv,半个周期两边60°区间用Uuv本身表示,中间60°区间用-(Uvw+Uwu)表示,当将Uvw和Uwu作同样处理时,就可以得到三相线电压波形只有半周内两边60°区间的两种波形形状,并且有正有负.把这样的电压波形作为脉宽调制的参考信号,载波仍用三角波,并把各区间的曲线用直线近似(实践表明,这样做引起的误差不大,完全可行),就可以得到线电压的脉冲波形,该波形是完全对称,且规律性很强,负半周是正半周相应脉冲列的反相,因此,只要半个周期两边60°区间的脉冲列一经确定,线电压的调制脉冲波形就唯一地确定了.这个脉冲并不是开关器件的驱动脉冲信号,但由于已知三相线电压的脉冲工作模式,就可以确定开关器件的驱动脉冲信号了.该方法不仅能抑制较多的低次谐波,还可减小开关损耗和加宽线性控制区,同时还能带来用微机控制的方便,但该方法只适用于异步电动机,应用范围较小.3 .电流控制PWM电流控制PWM的基本思想是把希望输出的电流波形作为指令信号,把实际的电流波形作为反馈信号,通过两者瞬时值的比较来决定各开关器件的通断,使实际输出随指令信号的改变而改变.其实现方案主要有以下3种.3.1 滞环比较法[4]这是一种带反馈的PWM控制方式,即每相电流反馈回来与电流给定值经滞环比较器,得出相应桥臂开关器件的开关状态,使得实际电流跟踪给定电流的变化.该方法的优点是电路简单,动态性能好,输出电压不含特定频率的谐波分量.其缺点是开关频率不固定造成较为严重的噪音,和其他方法相比,在同一开关频率下输出电流中所含的谐波较多.3.2 三角波比较法[2]该方法与SPWM法中的三角波比较方式不同,这里是把指令电流与实际输出电流进行比较,求出偏差电流,通过放大器放大后再和三角波进行比较,产生PWM 波.此时开关频率一定,因而克服了滞环比较法频率不固定的缺点.但是,这种方式电流响应不如滞环比较法快.3.3 预测电流控制法[6]预测电流控制是在每个调节周期开始时,根据实际电流误差,负载参数及其它负载变量,来预测电流误差矢量趋势,因此,下一个调节周期由PWM产生的电压矢量必将减小所预测的误差.该方法的优点是,若给调节器除误差外更多的信息,则可获得比较快速,准确的响应.目前,这类调节器的局限性是响应速度及过程模型系数参数的准确性.4 .空间电压矢量控制PWM [7]空间电压矢量控制PWM(SVPWM)也叫磁通正弦PWM法.它以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,由它们的比较结果决定逆变器的开关,形成PWM波形.此法从电动机的角度出发,把逆变器和电机看作一个整体,以内切多边形逼近圆的方式进行控制,使电机获得幅值恒定的圆形磁场(正弦磁通).具体方法又分为磁通开环式和磁通闭环式.磁通开环法用两个非零矢量和一个零矢量合成一个等效的电压矢量,若采样时间足够小,可合成任意电压矢量.此法输出电压比正弦波调制时提高15%,谐波电流有效值之和接近最小.磁通闭环式引.入磁通反馈,控制磁通的大小和变化的速度.在比较估算磁通和给定磁通后,根据误差决定产生下一个电压矢量,形成PWM波形.这种方法克服了磁通开环法的不足,解决了电机低速时,定子电阻影响大的问题,减小了电机的脉动和噪音.但由于未引入转矩的调节,系统性能没有得到根本性的改善.5 .矢量控制PWM[8]矢量控制也称磁场定向控制,其原理是将异步电动机在三相坐标系下的定子电流Ia,Ib及Ic,通过三相/二相变换,等效成两相静止坐标系下的交流电流Ia1及Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流I m1及It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿对直流电动机的控制方法,实现对交流电动机的控制.其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制.通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制.但是,由于转子磁链难以准确观测,以及矢量变换的复杂性,使得实际控制效果往往难以达到理论分析的效果,这是矢量控制技术在实践上的不足.此外.它必须直接或间接地得到转子磁链在空间上的位置才能实现定子电流解耦控制,在这种矢量控制系统中需要配置转子位置或速度传感器,这显然给许多应用场合带来不便.6 .直接转矩控制PWM[8]1985年德国鲁尔大学Depenbrock教授首先提出直接转矩控制理论(Direct Torque Control简称DTC).直接转矩控制与矢量控制不同,它不是通过控制电流,磁链等量来间接控制转矩,而是把转矩直接作为被控量来控制,它也不需要解耦电机模型,而是在静止的坐标系中计算电机磁通和转矩的实际值,然后,经磁链和转矩的Band-Band控制产生PWM信号对逆变器的开关状态进行最佳控制,从而在很大程度上解决了上述矢量控制的不足,能方便地实现无速度传感器化,有很快的转矩响应速度和很高的速度及转矩控制精度,并以新颖的控制思想,简洁明了的系统结构,优良的动静态性能得到了迅速发展.但直接转矩控制也存在缺点,如逆变器开关频率的提高有限制.7. 非线性控制PWM单周控制法[7]又称积分复位控制(Integration Reset Control,简称IRC),是一种新型非线性控制技术,其基本思想是控制开关占空比,在每个周期使开关变量的平均值与控制参考电压相等或成一定比例.该技术同时具有调制和控制的双重性,通过复位开关,积分器,触发电路,比较器达到跟踪指令信号的目的.单周控制器由控制器,比较器,积分器及时钟组成,其中控制器可以是RS触发器,其控制原理如图1所示.图中K可以是任何物理开关,也可是其它可转化为开关变量形式的抽象信号.单周控制在控制电路中不需要误差综合,它能在一个周期内自动消除稳态,瞬态误差,使前一周期的误差不会带到下一周期.虽然硬件电路较复杂,但其克服了传统的PWM控制方法的不足,适用于各种脉宽调制软开关逆变器,具有反应快,开关频率恒定,鲁棒性强等优点,此外,单周控制还能优化系统响应,减小畸变和抑制电源干扰,是一种很有前途的控制方法.8 .谐振软开关PWM传统的PWM逆变电路中,电力电子开关器件硬开关的工作方式,大的开关电压电流应力以及高的du/dt和di/dt限制了开关器件工作频率的提高,而高频化是电力电子主要发展趋势之一,它能使变换器体积减小,重量减轻,成本下降,性能提高,特别当开关频率在18kHz以上时,噪声将已超过人类听觉范围,使无噪声传动系统成为可能.谐振软开关PWM的基本思想是在常规PWM变换器拓扑的基础上,附加一个谐振网络,谐振网络一般由谐振电感,谐振电容和功率开关组成.开关转换时,谐振网络工作使电力电子器件在开关点上实现软开关过程,谐振过程极短,基本不影响PWM技术的实现.从而既保持了PWM技术的特点,又实现了软开关技术.但由于谐振网络在电路中的存在必然会产生谐振损耗,并使电路受固有问题的影响,从而限制了该方法的应用.总结PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点.由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一.相关应用领域:PWM控制结束主要应用在电力电子技术行业,具体讲,包括风力发电、电机调速、直流供电等领域,由于其四象限变流的特点,可以反馈再生制动的能量,对于目前国家提出的节能减排具有积极意义。
毕业设计题目:院、系:姓名:指导教师:系主任:年月日单片机控制直流电机脉宽调速系统设计摘要本文介绍一种基于单片机控制的直流电机脉宽调速系统。
系统以廉价的51单片机为控制核心,以直流电机为控制对象。
从系统的角度出发,对电路进行总体方案论证设计,确定电路各个的功能模块之间的功能衔接和接口设置,详细分析了各个模块的方案论证和参数设置。
整个系统利用51单片机的定时器产生10KH左右的脉宽脉冲,通过带有功率驱动作用的TLP250光耦实现控制单元与驱动单元的强弱电隔离,采用2个IGBT和MOSFET等一类电压型功率开关管专用驱动芯片IR2110,驱动IGBT—FGA25N120构成的H桥电路实现对直流电机的调速,利用TL431、线性光耦PC817和AD0832构成的电压采集单元实现系统的闭环控制,提高整个系统的智能化、自动化水平,为工业生产应用提供可能。
关键词单片机;PWM;光耦隔离;IGBTThe PWM speed regulating system of DCmotor based on SCMAbstractThe thesis introduces a PWM speed regulating system of D.C motor based on 51 microcontroller. The system is designed on the affordable MC51 mircocontroller for the D.C. motor. From the systematic prespective, the thesis describes the circuit design and its comprehensive evaluation,which determines how to do with the functional linkage and interface between functional modules in the electric circuit. Besides, the evaluation of each module and the involved parameters are fully explained in the thesis. The system uses MC51’s timer to generate 10k pluse and uses TLP250 optical coupler to realize the strong and weak optoelectronic isolation between the control units and driving units. The implement of the speed regulation by the H-bridge circuits which are constructed by voltage-based power switching transistors and specific IR2110, IGBT- FGA25N120 Driving Chips, including two IGBT and MOSFET chips. And the V oltage Acquisition Collection of TL431, PC817 Linear Opticcoupler and AD0832 is desgined to do the closed-loop control in the system. The above considerations finally help to improve intelligentization and automation of the overall system and give the possibility to the industrial application.Keywords MC51;PWM;optical coupler’s isolation;IGBT目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论 (1)1.1 前言 (1)1.2 直流电动机调速概述 (1)1.2.1 直流电机调速原理 (1)1.2.2 直流调速系统实现方式 (3)1.3 直流调速系统实现方式 (4)第2章系统总体方案论证 (6)2.1 系统方案比较 (6)2.2 系统方案描述 (6)第3章硬件电路的设计 (8)3.1 逻辑延时电路方案设计 (8)3.2 驱动电路方案设计 (9)3.2.1 驱动电路方案描述 (9)3.2.2 IR2110驱动电路中IGBT抗干扰设计 (10)3.3 IR2110功率驱动介绍 (11)3.3.1 IR2100内部结构原理图及管脚说明 (11)3.3.2 IR2110的自举电路 ................................ 错误!未定义书签。

电流滞环跟踪PWM控制技术摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。
关键词:电流滞环控制脉宽控制滞环宽度控制法一、前言应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。
但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
二、电流滞环跟踪控制原理常用的一种电流闭环控制方法是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A相控制原理如1图所示。
图1 电流滞环跟踪控制的A相原理图图中,电流控制器是带滞环的比较器,环宽为2h。
将给定电流i*a 与输出电流i a进行比较,电流偏差∆i a超过时±h,经滞环控制器HBC控制逆变器A相上(或下)桥臂的功率器件动作。
B、C二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM电压波形示于图6-23。
如果,i a < i*a ,且i*a - i a ≥h,滞环控制器 HBC输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。
当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大直到达到i a= i*a+ h, i a = –h,使滞环翻转,HBC输出负电平,关断V1 ,并经延时后驱动V4但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。
什么是电流跟踪型PWM变流电路?采用滞环比较方式的电流跟踪型变流器有何特点?
电流跟踪型PWM变流电路是一种通过跟踪负载电流来控制输出电流的电路。
它通常用于要求精确控制和调节负载电流的应用,如电动机驱动、电源适配器等。
采用滞环比较方式的电流跟踪型变流器具有以下特点:
1.滞环比较方式:滞环比较方式是一种在电流跟踪型PWM
变流器中常用的控制方法。
该方式通过将参考电流与实际
负载电流进行比较,并应用滞回控制算法,调整PWM信
号的占空比,使输出电流跟踪参考电流。
2.高精度电流控制:滞环比较方式的电流跟踪型变流器具有
高精度的电流控制能力。
通过将滞环比较器设置为合适的
阈值,可以实现对输出电流的精确控制和调节。
该方式适
用于对负载电流要求较高的应用,能够实现精确的负载电
流跟踪和控制。
3.快速响应性能:采用滞环比较方式的电流跟踪型变流器具
有快速的响应速度。
由于滞环比较器能够快速调整PWM
信号的占空比,以响应负载电流的变化,因此可以实时动
态调整输出电流,并具有较好的过载能力和动态响应性能。
4.抗负载波动能力强:滞环比较方式的电流跟踪型变流器通
过及时调整PWM信号的占空比来跟踪负载电流,具有较
强的抗负载波动能力。
即使在负载电流发生变化的情况下,
也能够迅速调整输出电流,使其保持稳定。
需要注意的是,滞环比较方式的电流跟踪型变流器可能存在一些不足之处,如可能引入更多谐波成分和较高的开关频率。
因此,在应用中需要综合考虑设计需求和性能要求,选择合适的控制策略和优化方法,以实现最佳的电流跟踪和控制效果。
华东交通大学理工学院Institute of Technology.East China Jiaotong University毕业设计Graduation Design( 2010 — 2014 年)题目基于单片机的感应电动机PWM变频调速系统设计分院:电气与信息工程分院专业:电气工程及其自动化华东交通大学理工学院毕业设计(论文)原创性申明本人郑重申明:所呈交的毕业设计(论文)是本人在导师指导下独立进行的研究工作所取得的研究成果。
设计(论文)中引用他人的文献、数据、图件、资料,均已在设计(论文)中特别加以标注引用,除此之外,本设计(论文)不含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。
本人完全意识到本申明的法律后果由本人承担。
毕业设计(论文)作者签名:日期:年月日毕业设计(论文)版权使用授权书本毕业设计(论文)作者完全了解学院有关保留、使用毕业设计(论文)的规定,同意学校保留并向国家有关部门或机构送交设计(论文)的复印件和电子版,允许设计(论文)被查阅和借阅。
本人授权华东交通大学理工学院可以将本设计(论文)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编毕业设计(论文)。
(保密的毕业设计(论文)在解密后适用本授权书)毕业设计(论文)作者签名:指导教师签名:签字日期:年月日签字日期:年月日华东交通大学理工学院毕业设计摘要在电力电子器件制造技术和电力电子控制技术不断飞速发展的今天,得益于变频器的发展,电机的变频调速在理论研究和实际应用中得到了飞速的发展。
变频调速不仅在调速的性能上面得到了跨越式的提高,同时在控制技术和补偿技术方面也得到的质的飞跃,控制策略的提升和简化使得电机的变频调速成为当今主要的调速方式。
得益于此,再加上交流电机没有换向器以及结构简单等因素从而导致现代交流电机有取代直流电机的趋势。
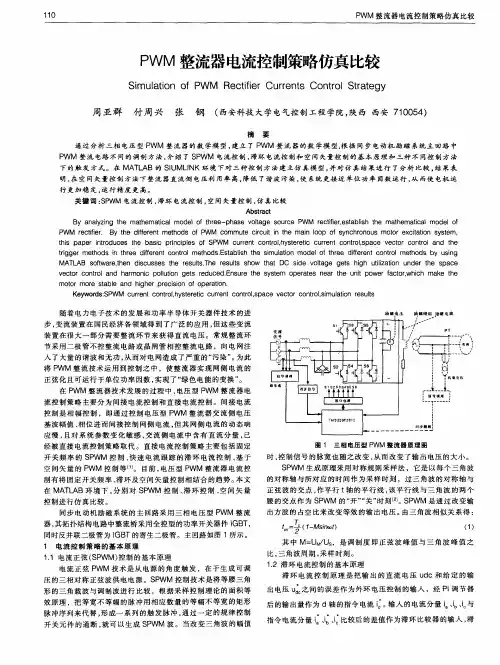
2.3 PWM 整流器电流控制技术由以上对三相PWM 整流器的建模分析可知,PWM 整流器能同时完成直流电压和交流侧电流的控制。
目前,间接电流控制和直接电流控制是VSR 两种主要的控制策略[30]。
间接电流策略简单,不需要进行电流反馈,依据电路关系,通过对整流器交流侧基波电压的控制来控制交流侧电流。
但间接电流控制主要缺点是电流动态响应慢,依赖于电路参数的准确性。
直接电流控制包括:滞环电流控制、固定开关频率电流控制、空间矢量电流控制等,这些策略能够实现电流快速响应,具有较好的动态相应性能。
2.3.1 PWM 整流器间接电流控制技术间接电流控制通过对PWM 整流器交流侧基波电压的控制,实现对交流侧电流的控制,该控制策略无需对交流侧电流进行采样闭环,因而是一种相对简单的VSR 电流控制方案[31]。
设三相对称,以A 相为例,设A 相交流输入电压为E ,交流侧电流为I ,滤波电感为L ,线路电阻为R ,整流器交流侧基波电压为V ,则由戴维南电压定律可得:()j L R ω=++E V I (2-33)当E 、L 、R 确定时,通过PWM 控制VSR 输出的交流侧基波电压V ,便能间接控制交流侧电流I 。
设:()sin()()sin()E t E t I t I t ωωϕ=⎧⎨=+⎩(2-34) 则根据(2-33)式可计算得此时VSR 交流基波电压瞬时表达式为:()sin()sin()sin()2V t E t LI t RI t πωωωϕωϕ=-++-+ (2-35)从而,如果可以控制VSR 交流侧输出式(2-35)所描述的基波电压,则此时交流侧的电流即为()sin()I t I t ωϕ=+。
通过该控制ϕ角值便能实现对功率因素的控制,当ϕ角等于0时,PWM 整流器属于单位功率因数运行状态。
使用SPWM 算法,设三角载波的幅值为±U T ,当载波频率足够高时,可忽略VSR 交流侧的谐波电压,当A 相的调制正弦信号为:()sin()ma m u t U t ωγ=+ (2-36)则与其对应VSR 交流侧基波电压表达式为:()sin()2m dc a TU Uu t t U ωγ=+ (2-37)式中dc U 为VSR 直流侧电压,当三角载波的幅值为±1时,由式(2-36)和式(2-37)可知,只需将所需的交流侧基波电压乘以2dcU ,即可得到该交流侧基波电压所对应的正弦调制信号。