电流滞环跟踪PWM(CHBPWM)控制技术的仿真
- 格式:doc
- 大小:1.71 MB
- 文档页数:22
三相逆变器电流滞环控制仿真
1仿真模型
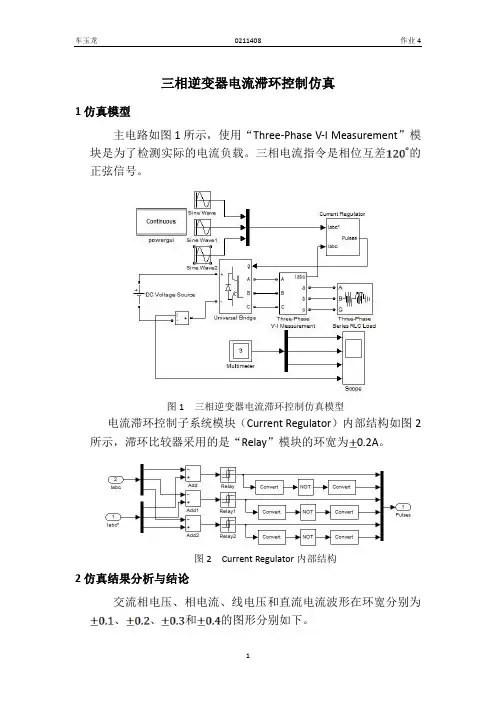
主电路如图1所示,使用“Three-Phase V-I Measurement”模块是为了检测实际的电流负载。
三相电流指令是相位互差的正弦信号。
图1 三相逆变器电流滞环控制仿真模型
电流滞环控制子系统模块(Current Regulator)内部结构如图2所示,滞环比较器采用的是“Relay”模块的环宽为0.2A。
图2 Current Regulator内部结构
2仿真结果分析与结论
交流相电压、相电流、线电压和直流电流波形在环宽分别为
、、和的图形分别如下。
负载谐波分析如下图图所示。
相电压和线电压的基本形状与SPWM逆变器类似。
电流近似正弦波,基本能够跟踪指令信号,在指令信号上下呈锯齿状波动。
负载电流的频谱与SPWM逆变器有着明显不同,它有各次谐波,不再像SPWM逆变器那样具有与载波频率有关的特定次谐波。
从环宽分别为、、和的交流相电压、相电流、线电压和直流电流波形可以看出,环宽过宽时,开关频率低,但跟踪误差增大;环宽过窄时,跟踪误差减小,但开关的动作频率过高,开关损耗随之增大。
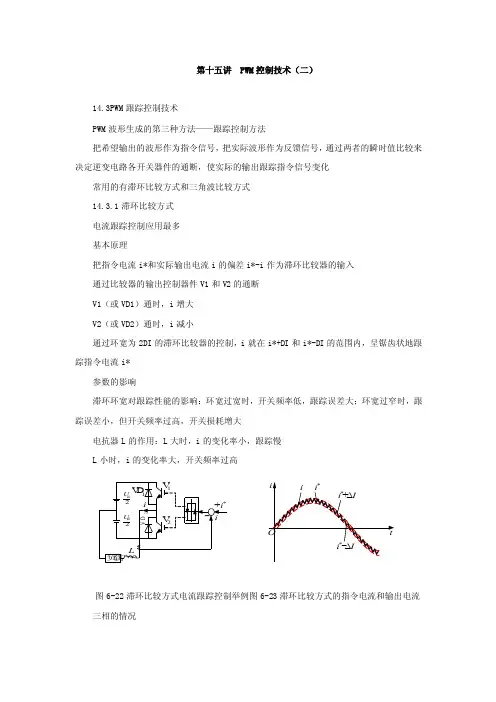
pwm跟踪调试技术PWM波形生成的第三种方法是跟踪控制方法,它是把希望输出的波形作为指令信号,把实际波形作为反馈信号,通过两者的瞬时值比较来决定逆变电路各开关器件的通断,使实际的输出跟踪指令信号变化。
常用的有滞环比较方式和三角波比较方式。
下面就分别讨论这两种方式。
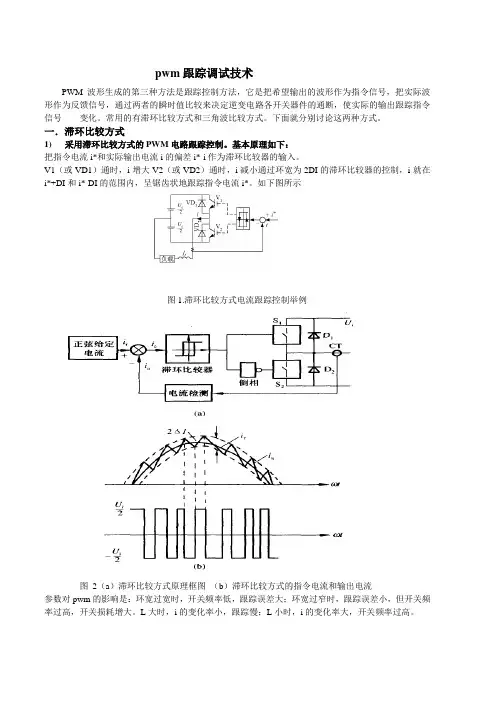
一.滞环比较方式1) 采用滞环比较方式的PWM电路跟踪控制。
基本原理如下:把指令电流i*和实际输出电流i的偏差i*-i作为滞环比较器的输入。
V1(或VD1)通时,i增大V2(或VD2)通时,i减小通过环宽为2DI的滞环比较器的控制,i就在i*+DI和i*-DI的范围内,呈锯齿状地跟踪指令电流i*。
如下图所示图1.滞环比较方式电流跟踪控制举例图2(a)滞环比较方式原理框图(b)滞环比较方式的指令电流和输出电流参数对pwm的影响是:环宽过宽时,开关频率低,跟踪误差大;环宽过窄时,跟踪误差小,但开关频率过高,开关损耗增大。
L大时,i的变化率小,跟踪慢;L小时,i的变化率大,开关频率过高。
图2(a)给出了采用滞环比较的电流控制原理框图。
正弦给定电流i r与实际电流检测信号h相比较,其偏差ie经过具有滞环特性的比较器,一路直接,—路倒相,产生互补信号,去控制逆变电路上、下两功率开关民、民。
当i r>个且偏差达到△I时,S1导通、S2关断断,电流增加;反之。
Sl关断、s2导通,电流减小。
如此上、下两管反复导通、关断,迫使实际电流以锯齿状不断跟踪给定电流变化,并将偏差限制在允许范围内。
勺此同时,逆变器输出约电压成pwm波,屯流、电压波形如图2的(b)所示。
图2(a)中CT为电流检测元件,它必须有很宽的通频带,例如用高灵敏度的霍耳电流传感器。
不难看出,滞环的宽度2△I材跟踪性能有很大的影响。
环过宽,开关频率和开关损耗可降低。
但跟踪误差增大;环过窄,跟踪误差减小,但开关频率和开关损耗增加,这会受开关器件允许丁作频率的限制,而且村给定的滞环宽度,开关频率也不是—个常数。
武汉理工大学《电力装置与系统》课程设计说明书摘要分析单相电压型PWM整流电路(功率因素校正电路)的工作原理和工作模式, 功率因数校正(PFC)技术诞生与20世纪80年代,它采用的是高频开关工作方式,具有体积小,重量轻,效率高,输入功率因素(PF)接近1的优点,采用PWM进行控制,其中控制方法采用的是电流滞环比较法,因硬件电路简单,属于实时控制,电流响应快,对负载的适应性强,由于不需要载波,所以输出电压不含特定频率的谐波分量,另外,这种控制方式,有利于提高电压利用率选择适当的工作模式和工作时序,可使PWM整流电路的输出直流电压得到有效的稳定值。
同时也调节了交流侧电流的大小和相位,实现能量在交流侧和直流侧的双向流动,并使变流装置获得良好的功率因数。
最后建立其Matlab的仿真模型,验证了设计的正确性。
关键词:单相电压型,PWM整流,功率因素校正,电流滞环比较法,Matlab仿真武汉理工大学《电力装置与系统》课程设计说明书目录1 PWM控制技术 (2)1.1 PWM简介 (2)1.2 PWM控制原理和应用 (2)1.2.1 PWM控制的基本原理 (2)1.2.2 PWM计算法和调制法 (4)1.2.3规则采样法 (6)1.2.4 PWM跟踪控制技术 (7)2 功率因素校正技术 (8)2.1功率因数(PF)的定义 (9)2.2功率因数校正 (9)2.3功率因数校正实现方法 (10)2.4提高功率因数的几种方法 (11)2.4.1提高自然因数的方法 (11)2.4.2人工补偿法 (11)3 Matlab 仿真实验 (11)3.1电路的工作原理 (11)3.2实验要求 (14)3.3Matlab仿真步骤和波形 (14)3.3.1选取器件 (14)3.3.2设置各器件的仿真参数 (15)3.3.3运行和调试 (15)3.4仿真结论 (17)4总结与体会 (17)参考文献......................................................................................................................................1 6武汉理工大学《电力装置与系统》课程设计说明书1PWM 控制技术1.1 PWM 简介PWM 的全称是Pulse Width Modulation (脉冲宽度调制),它是通过改变输出方波的占空比来改变等效的输出电压。
第55卷第1期2021年1月电力电子技术Power ElectronicsVol.55,No.lJanuary2021电机模拟器的设计、仿真与实现金阳I,毕大强2,郑婷婷I,段1(1.中国核动力研究设计院,四川成都610005;2.电力系统国家重点实验室,清华大学,电机系,北京100084)摘要:针对永磁同步电机(PMSM)的功率模拟提出一种新方法,即基于双脉宽调制(PWM)变换器的能量回馈型电子负载结构,其输入PWM变换器按照PMSM的特性采用滞环电流控制,使该变换器对外接口特性,如电压、电流、转速等信息与实际电机一致,达到模拟真实PMSM的目的。
输出PWM变换器釆用幅相控制达到能量回馈电网的目的。
在Matlab/Simulink平台下搭建仿真模型,并与Simulink库中自带的PMSM模型进行对比仿真,验证该模型的正确性,并基于智能功率模块(IPM)制作实验样机,基于C语言进行控制算法编程。
关键词:永磁同步电机;电子负载;电机模拟器中图分类号:TM351文献标识码:A文章编号:1000-100X(2021)01-0071-05The Design,Simulation and Implementation of Motor EmulatorJIN Yang1,BI Da-qiang2,ZHENG Ting-ting1,DUAN Yan-yao1(1.Nuclear Power Institute of China,Chengdu610005,China)Abstract:A new method of simulation for permanent magnet synchronous motor(PMSM)is proposed.The main structure is an energy feedback electronic load based on dual pulse width modulation(PWM)converter.The input side converter adopts hysteresis current control according to the characteristics of PMSM,makes the external interface features such as voltage,current,speed of the converter the same as the real motor to achieve the purpose of emulating the real PMSM.The output side converter adopts amplitude phase control to achieve the goal of energy feedback to the grid.Matlab/Simulink module for the simulation is applied and compared to the built-in PMSM in Simulink to prove the correctness of the the module,then make a simulation prototype based on intelligent power module(IPM),and programme the control algorithm based on the C language.Keywords:permanent magnet synchronous motor;electronic load;motor emulator1引言电子负载是可以模拟真实负载的电力电子装置,能模拟各种类型的负载,并将电能反馈回电网。
第十五讲 PWM 控制技术(二)14.3PWM 跟踪控制技术PWM 波形生成的第三种方法——跟踪控制方法把希望输出的波形作为指令信号,把实际波形作为反馈信号,通过两者的瞬时值比较来决定逆变电路各开关器件的通断,使实际的输出跟踪指令信号变化常用的有滞环比较方式和三角波比较方式 14.3.1滞环比较方式 电流跟踪控制应用最多 基本原理把指令电流i*和实际输出电流i 的偏差i*-i 作为滞环比较器的输入 通过比较器的输出控制器件V1和V2的通断 V1(或VD1)通时,i 增大 V2(或VD2)通时,i 减小通过环宽为2DI 的滞环比较器的控制,i 就在i*+DI 和i*-DI 的范围内,呈锯齿状地跟踪指令电流i*参数的影响滞环环宽对跟踪性能的影响:环宽过宽时,开关频率低,跟踪误差大;环宽过窄时,跟踪误差小,但开关频率过高,开关损耗增大电抗器L 的作用:L 大时,i 的变化率小,跟踪慢 L 小时,i 的变化率大,开关频率过高图6-22滞环比较方式电流跟踪控制举例图6-23滞环比较方式的指令电流和输出电流 三相的情况图6-22图6-23图6-24三相电流跟踪型PWM 逆变电路图6-2三相电流跟踪型PWM 逆变电路输出波形 采用滞环比较方式的电流跟踪型PWM 变流电路有如下特点 (1)硬件电路简单(2)实时控制,电流响应快(3)不用载波,输出电压波形中不含特定频率的谐波(4)和计算法及调制法相比,相同开关频率时输出电 流中高次谐波含量多(5)闭环控制,是各种跟踪型PWM 变流电路的共同特点采用滞环比较方式实现电压跟踪控制把指令电压u*和输出电压u 进行比较,滤除偏差信号中的谐波,滤波器的输出送入滞环比较器,由比较器输出控制开关器件的通断,从而实现电压跟踪控制图6-26电压跟踪控制电路举例和电流跟踪控制电路相比,只是把指令和反馈信号从电流变为电压 输出电压PWM 波形中含大量高次谐波,必须用适当的滤波器滤除 u*=0时,输出电压u 为频率较高的矩形波,相当于一个自励振荡电路u*为直流信号时,u 产生直流偏移,变为正负脉冲宽度不等,正宽负窄或正窄负宽的矩形波图6-24图6-25u uu*为交流信号时,只要其频率远低于上述自励振荡频率,从u中滤除由器件通断产生的高次谐波后,所得的波形就几乎和u*相同,从而实现电压跟踪控制14.3.2三角波比较方式基本原理不是把指令信号和三角波直接进行比较,而是通过闭环来进行控制把指令电流i*U、i*V和i*W和实际输出电流iU、iV、iW进行比较,求出偏差,通过放大器A放大后,再去和三角波进行比较,产生PWM波形放大器A通常具有比例积分特性或比例特性,其系数直接影响电流跟踪特性特点开关频率固定,等于载波频率,高频滤波器设计方便为改善输出电压波形,三角波载波常用三相三角波载波和滞环比较控制方式相比,这种控制方式输出电流所含的谐波少图6-27三角波比较方式电流跟踪型逆变电路定时比较方式不用滞环比较器,而是设置一个固定的时钟以固定采样周期对指令信号和被控制变量进行采样,根据偏差的极性来控制开关器件通断在时钟信号到来的时刻,如i<i*,V1通,V2断,使i增大如i>i*,V1断,V2通,使i减小每个采样时刻的控制作用都使实际电流与指令电流的误差减小采用定时比较方式时,器件的最高开关频率为时钟频率的1/2和滞环比较方式相比,电流控制误差没有一定的环宽,控制的精度低一些 14.4PWM 整流电路及其控制方法实用的整流电路几乎都是晶闸管整流或二极管整流晶闸管相控整流电路:输入电流滞后于电压,且其中谐波分量大,因此功率因数很低 二极管整流电路:虽位移因数接近1,但输入电流中谐波分量很大,所以功率因数也很低把逆变电路中的SPWM 控制技术用于整流电路,就形成了PWM 整流电路控制PWM 整流电路,使其输入电流非常接近正弦波,且和输入电压同相位,功率因数近似为1,也称单位功率因数变流器,或高功率因数整流器14.4.1PWM 整流电路的工作原理PWM 整流电路也可分为电压型和电流型两大类,目前电压型的较多 1.单相PWM 整流电路图6-28a 和b 分别为单相半桥和全桥PWM 整流电路半桥电路直流侧电容必须由两个电容串联,其中点和交流电源连接 全桥电路直流侧电容只要一个就可以交流侧电感Ls 包括外接电抗器的电感和交流电源内部电感,是电路正常工作所必须的图6-28单相PWM 整流电路a)单相半桥电路b)单相全桥电路 单相全桥PWM 整流电路的工作原理正弦信号波和三角波相比较的方法对图6-28b 中的V1~V4进行SPWM 控制,就可以在桥的交流输入端AB 产生一个SPWM 波uABa )b )图6-28duAB中含有和正弦信号波同频率且幅值成比例的基波分量,以及和三角波载波有关的频率很高的谐波,不含有低次谐波由于Ls的滤波作用,谐波电压只使is产生很小的脉动当正弦信号波频率和电源频率相同时,is也为与电源频率相同的正弦波us一定时,is幅值和相位仅由uAB中基波uABf的幅值及其与us的相位差决定改变uABf的幅值和相位,可使is和us同相或反相,is比us超前90°,或使is与us相位差为所需角度相量图(图6-29)a:滞后相角d,和同相,整流状态,功率因数为1。
三相电压型PWM整流器的数学模型和主电路设计摘要传统的整流器一般采用二极管整流或相控整流,这种类型的整流器存在着输入电流非正弦,动态性能受到限制和功率因数较低的缺点。
针对以上的问题,本文首先对三相电压型PWM(Pulse Width Modulation)整流器的工作原理进行了分析并得到系统的数学模型,然后推导出PWM整流器双闭环控制系统的传递函数框图并计算电流调节器和电压调节器的参数,最后通过MATLAB对三相电压型PWM整流器系统进行了仿真。
本文采用开关函数法构建了三相VSR(V oltage Source Rectifier)的Simulink 模型,它是依照变换电路的输入与输出的传递函数建立其模型,与电路的拓扑结构无关。
文中详细地论述了电压和电流控制器、整流器、PWM发生单元等各子系统的Simulink建模,并基于所提出的模型研究了PWM整流系统开环控制和双闭环控制下的运行情况和系统特性。
经过仿真发现仿真结果与理论分析相符,验证了模型的正确性。
通过仿真发现滤波电感和直流侧电容参数对系统的稳态运行至关重要。
从仿真的角度验证了三相PWM整流器比传统的相控整流器具备更加良好的性能。
关键词:三相电压型PWM整流器,数学模型,开环控制,双闭环控制MATHEMATICAL MODEL AND MAIN CIRCUIT DESIGN OF THREE-PHASE VOLTAGE-SOURCE PWM RECTIFIERABSTRACTThe traditional rectifier, diode-bridge rectifier or phase-controlled rectifier, cause input current isn't sinusoidal waveform, low power factor, and dynamic performance is limited. In order to solve these problems, first, the mathematical model of 3-phase PWM VSR was created, second, the block diagram of double closed-loop controlled system for three-phase VSR was established. At the same time, the parameters of current regulator and voltage regulator can be calculated, finally, 3-phase PWM VSR was simulated by MATLAB. Based on the above studies, the simulink based model of 3-phase PWM VSR is obtained by using switching function concept which able to model converter circuits according to its input and output transfer functions. The simulink models of the voltage oriented control, voltage controller, current controller, rectifier and PWM generator are developed in detail, and based on these models can analyze the characteristics and system operation of open-loop control and double closed-loop controlled system. The simulation results verify the rectifying state validity of the proposed method. At last, through circuit simulation, we can find filter inductor and DC side capacitance is very important for system. Finally, we can find the PWM rectifier better than traditional rectifier.Key words:three-phase voltage-source PWM rectifier,open-loop control,double closed-loop controlled system,mathematical model目录1 绪论 --------------------------------------------------------------------------------------------------- 11.1 PWM整流技术的发展 --------------------------------------------------------------------- 11.2 PWM整流技术的现状 --------------------------------------------------------------------- 21.3 本文所做的主要工作 ---------------------------------------------------------------------- 42 三相电压型PWM整流电路基本原理和数学模型 ----------------------------------------- 52.1 三相电压型PWM整流电路的拓扑结构和理论分析 ------------------------------- 5三相电压型PWM整流电路的拓扑结构--------------------------------------------- 5三相电压型PWM整流电路的理论分析--------------------------------------------- 62.2 数学模型 ------------------------------------------------------------------------------------- 7整流器开关函数的数学模型------------------------------------------------------------ 8三相静止坐标系下的数学模型--------------------------------------------------------- 9两相静止αβ坐标系模型 --------------------------------------------------------------- 11三相电压型PWM整流器dq模型的建立 ------------------------------------------ 12 3 三相电压型PWM整流器控制系统 ---------------------------------------------------------- 163.1 PWM控制基本原理 ----------------------------------------------------------------------- 163.2 PWM整流器的控制方法 ----------------------------------------------------------------- 173.3 三相电压型PWM整流器双闭环控制 ------------------------------------------------ 19电流内环控制----------------------------------------------------------------------------- 21电压外环控制----------------------------------------------------------------------------- 24 4 主电路交流侧电感和电容设计 ---------------------------------------------------------------- 274.1 三相电压型PWM整流器交流侧电感的计算和选择 ------------------------------ 274.2 三相电压型PWM整流器直流侧电容的参数选择 --------------------------------- 304.3 交流侧电流谐波分析 --------------------------------------------------------------------- 335 三相电压型PWM整流器仿真分析 ---------------------------------------------------------- 365.1 三相电压型PWM整流器系统的开环控制 ------------------------------------------ 365.2 三相电压型PWM整流器双闭环控制仿真 ------------------------------------------ 40各个模块的搭建-------------------------------------------------------------------------- 40仿真参数的设置-------------------------------------------------------------------------- 42仿真结果----------------------------------------------------------------------------------- 43仿真分析----------------------------------------------------------------------------------- 45 结论 ----------------------------------------------------------------------------------------------------- 46 致谢 ----------------------------------------------------------------------------------------------------- 47 参考文献----------------------------------------------------------------------------------------------- 48 附件 ----------------------------------------------------------------------------------------------------- 491.绪论随着电力电子技术的迅猛发展,电力电子器件由早期的不可控二极管、半控型晶闸管,发展到后来的全控型器件POWER-MOSFET、IGBT(Insulated Gate Bipolar Transistor),到目前的IGCT(Integrated Gate Commutated Thyristors)和一体化的IPM (Intelligent Power Module),其开关频率逐步增大,功率等级不断提高,性能更加优异。
直流电机PWM调速系统的设计与仿真一、引言直流电机是电力传动中最常用的一种电动机,具有调速范围广、响应快、结构简单等优点。
而PWM(脉宽调制)技术是一种有效的电机调速方法,可以通过改变占空比控制电机的转速。
本文将介绍直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
二、建模分析1.直流电机的模型直流电机的数学模型包括电动势方程和电机转矩方程。
电动势方程描述电机的输出电动势与供电电压之间的关系,转矩方程描述电机的输出转矩与电机转速之间的关系。
2.PWM调速系统的控制策略PWM调速系统的控制策略主要包括PID控制和模糊控制两种方法。
PID控制是一种经典的控制方法,通过比较实际输出与期望输出,计算出控制量来调整系统。
模糊控制则是一种基于模糊逻辑的控制方法,通过模糊推理,将输入量映射为输出量。
三、电路设计1.电机驱动电路设计电机驱动电路主要由电流传感器、逆变器和滤波器组成。
电流传感器用于测量电机的电流,逆变器将直流电压转换为交流电压,滤波器用于消除电压中的高频噪声。
2.控制电路设计控制电路主要由控制器、比较器和PWM信号发生器组成。
控制器接收电机转速的反馈信号,并与期望转速进行比较,计算出控制量。
比较器将控制量与三角波进行比较,生成PWM信号。
PWM信号发生器将PWM信号转换为对应的脉宽调制信号。
四、仿真实验1.系统建模与参数设置根据直流电机的模型,建立MATLAB/Simulink仿真模型,并根据实际参数设置电机的转矩常数、转矩常数、电机阻抗等参数。
2.控制策略实现使用PID控制和模糊控制两种方法实现PWM调速系统的控制策略。
通过调节控制参数,比较不同控制方法在系统响应速度和稳定性上的差异。
3.仿真实验结果分析通过仿真实验,分析系统的静态误差、动态响应和稳定性等性能指标。
比较不同控制方法的优缺点,选择合适的控制方法。
五、结论本文介绍了直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
采用电流滞环调节器的电压矢量控制PWM整流器系统1 前言在电能变换中,作为主动方式的PWM整流器克服了传统二极管或相控整流所引起的大量谐波、功率因数低的缺点,成为目前国内外研究的热点[1]。
电流滞环控制是PWM整流器控制系统中最易实现、最简单的方式,但其开关频率不固定,对电力电子器件性能要求高,开关损耗大,不容易设计输出滤波器[2][3]。
空间电压矢量控制易于数字化实现,直流电压利用率高,输入电流畸变率低,但需要快速微处理器,计算过程复杂[4][5]。
针对以上控制方式的不足,本文提出了一种基于电流滞环的电压矢量控制PWM整流器方法。
它结合二者的优点,采用80C196MC作为控制核心,组成一个以电流滞环控制为内环,输出直流电压控制为外环的控制系统,开关状态输出采用自适应开关逻辑表,不需要计算开关作用时间,过程简单,易实现。
仿真和实验证明了此种控制方式的优点和性能。
2 系统dq数学模型控制所依据的是三相电压型PWM整流器在dq坐标系下的数学模型。
假设电网三相电压对称,且正弦化,即,则数学模型的方程式为:(1) 其中式(1)表明整流器输入电流的分量之间存在耦合,直接控制输入电流需要进行解耦。
同时,需要引入电网电压前馈进行补偿,提高动态性能,但这种方法控制过程复杂,需要解耦处理。
在整流器系统中,有功功率和无功功率之间是解耦的,可以独立进行控制。
本文提出用控制系统有功功率和无功功率方法间接控制dq轴电流分量,不必进行输入电流解耦。
3 控制系统原理根据上述dq坐标系下数学模型,结合电流滞环控制的优点。
设计出采用电流滞环调节器的电压矢量控制PWM整流器系统,结构方框图如下:图1 电压型PWM整流器电流滞环矢量控制原理Fig.1 Principle of voltage vector-controlled PWM rectifier with current hysteresis 在dq坐标系下,电网电压矢量、电流矢量、电感上电压矢量以及三相电压型PWM整流器交流输入侧电压矢量之间的关系如图(2)所示,其中是落后于的相位角。
MATLAB采用电流滞环控制的单相并网逆变器仿真研究Keywords Grid-connected inverter Filter Hysteresis control Hysteresis width目次1 绪论 11.1 研究背景 11.2 并网逆变器的研究现状 11.3 并网逆变器控制技术 21.4 本文的主要内容 52 单相全桥并网逆变器拓扑分析 62.1 并网逆变器的选择 62.2 滤波器的选择 72.3 单相全桥并网逆变器 82.4 本章小结 93 电流滞环控制的单相全桥并网逆变器 103.1 输出滤波器的分析 103.2 电流滞环控制 113.3 电流滞环控制的并网逆变器 133.4 本章小结 164 实验设计 174.1 仿真模型的建立 174.2 模型参数设置 184.3 本章小结 225 实验仿真与结果分析 235.1 稳态特性 235.2 动态特性 285.3 本章小结 32结论 33致谢 35参考文献361 绪论1.1 研究背景近年来随着社会经济飞速发展,人们生产生活对能源的需求大幅提高,当前世界能源结构还是以石油、煤炭和天然气等不可再生能源为主。
然而这类一次能源正日渐枯竭,并且利用的过程中大量排放温室气体及其他有害气体,导致温室效应、酸雨和全球气候异常等生态环境污染问题。
21世纪的今天,由于生态环境污染和能源危机,电力供需的矛盾日益突出,未来太阳能、风能和燃料电池等具有清洁无污染等优点的可再生能源将成为解决人类电力短缺的最佳选择。
: PWM控制技术广泛应用于逆变电路,对逆变电路有深远的影响。
随着时代的发展,研究人员也提出了多种控制方式,主要有通过比较载波和调制波,从而得到开关器件的脉冲控制序列的载波调制PWM技术,其在实际系统中一般采用如图1.1所示的脉冲宽度按正弦规律变化的PWM波,也称为SPWM;除此之外,还有可以提高电压利用率并降低损耗的空间矢量PWM技术(SVPWM)等。
目 录 摘要……………………………………………………1 关键词…………………………………………………1 一、电流滞环跟踪控制原理………………………………2 二、三相电流滞环跟踪控制系统的仿真……………………5 1、建立系统仿真模型…………………………………5 2、模块参数设置……………………………………6 3、电路封装…………………………………………8 4、作图程序设计……………………………………10 三、仿真波形及频谱分析………………………………12 四、仿真结果分析与总结………………………………18 1、仿真波形比较……………………………………18 2、电流频谱分析比较………………………………19 3、相电压、线电压频谱分析比较……………………19 4、总结……………………………………………19 五、课设心得体会………………………………………20 六、参考文献…………………………………………21 1
摘要: 滞环控制是一种应用很广的闭环电流跟踪控制方法,通常以响应速度快和结构简单而著称。在各种变流器控制系统中,滞环控制单元一般同时兼有两种职能,一则作为闭环电流调节器,二则起着PWM调制器的作用,将电流参考信号转换为相应的开关指令信号。然而,滞环控制的开关频率一般具有很大的不定性,高低频率悬殊,其开关频率范围往往是人们在进行滞环控制系统设计师比较关心的重要方面,只有明确开关频率的计算方法,才便于进行开关器件、滤波参数及滞环控制参数的选择。 电流跟踪型逆变器输出电流跟随给定的电流波形变化,这也是一种PWM控制方式。电流跟踪一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减小,将输出电流与给定电流的偏差控制在一定范围内。
关键词:
电流滞环跟踪PWM、闭环控制、滞环控制器
HBC、环宽、电流偏差、开关频率、响应波形、频谱图 2
一、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A相控制原理如1图所示。
图1 电流滞环跟踪控制的A相原理图 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流 i*a 与输出电流 ia 进行比较,电流偏差 ia 超过时 h,经滞环控制器HBC控制逆变器 A相上(或下)桥臂的功率器件动作。B、C 二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM电压波形示于图4。 如果, ia < i*a , 且i*a - ia ≥ h,滞环控制器 HBC输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大 直到达到ia = i*a + h , ia = –h ,使滞环翻转,HBC输出负电平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而 3
是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使 HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。
图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
图3 三相电流跟踪型PWM逆变电路 4
图4 三相电流跟踪型PWM逆变电路输出波形 因此,输出相电压波形呈PWM状,但与两侧窄中间宽的SPWM波相反,两侧增宽而中间变窄,这说明为了使电流波形跟踪正弦波,应该调整一下电压波形。 电流跟踪控制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。这是一对矛盾的因素,实用中,应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
电流滞环跟踪控制方法的精度高,响应快,且易于实现。但受功率开关器件允许开关频率的限制,仅在电机堵转且在给定电流峰值处才发挥出最高开关频率,在其他情况下,器件的允许开关频率都未得到充分利用。为了克服这个缺点,可以采用具有恒定开关频率的电流控制器,或者在局部范围内限制开关频率,但这样对电流波形都会产生影响。 5
二、三相电流跟踪滞环控制系统的仿真 使用MATLAB软件中的Simulink和SimpowerSystems工具箱构建三相电流跟踪滞环控制系统的仿真模型。 1、建立系统仿真模型
仿真参数为:E=100-300V; f=50Hz;带宽2h=5-30; 步长h=0.0001s,其 6 他参数自定。 选用的模块主要有:Mux 、 Sum 、 Relay、Scope 、Sine Wave 、DC Voltage Source 、 Ground 、Series RLC Branch 、Multimeter 、IGBT/Diode 、Logical Operator、Terminator、Voltage Measurement 、Powergui。
2、模块参数设置 Sine Wave Amplitude: 20 ; Bias: 0; Frequency(rad/sec): 100*pi ; Phase (rad):0; Sample Time:0
Sine Wave1 Amplitude: 20 ; Bias: 0; Frequency(rad/sec): 100*pi ; Phase(rad) :-4*pi/3; Sample Time:0 Sine Wave2 Amplitude: 20 ; Bias: 0; Frequency(rad/sec): 100*pi ; Phase(rad) :-2*pi/3; Sample Time:0
Sum Icon shape:round; 7
List of signs:|+-; Sample time:-1 Multimeter2 Ib:Series RLC Branch Multimeter4 Ib:Series RLC Branch2 Multimeter5 Ib:Series RLC Branch1 Relay、Relay2、Relay4 Switch on point:2.5;
Switch off point:-2.5; Output when on:1; Output when off:0 Scope Number of axes:3;
Variable name:b Scope1 Number of axes:4;
Variable name:c Scope2 Number of axes:6;
Variable name:a Logical Operator Logical Operator1 Logical Operator2 Operator:NOT; Number of input ports:1
DC Voltage Source DC Voltage Source1 Amplitude(V):100; Measurements:voltage Series RLC Branch Resistance(Ohms): 5 ; 8
Series RLC Branch1 Series RLC Branch2 Inductance(H): 0.005 ;
Capacitance(F): inf; Measurements:Branch vo;tage and current 注:表格中未注明的参数为默认值;Relay、Relay2、Relay4中的“Switch on point”与“Switch off point”的值的绝对值就是h,2h就是环宽。 此表格所设置的参数为E=200V,f=50HZ,带宽2h=5。 在菜单栏中选中"Simulation","Configuration Parameters、、、"将Stop time改为0.04,将Max step size改为1e-4,将Solver改为ode23tb(stiff/TR-BDF2),此时步长h=0.0001s. 3、电路封装 封装后的电路图如下所示: 9
其中子系统Subsystem和Subsystem1的内部图如下: Subsystem内部图(脉冲电路图)
Subsystem1内部图(主电路图) 10
4、作图程序设计 在上述电路建立完成后,执行后双击各示波器可观察触发脉冲波形、
相电压和线电压波形及电流波形,使用Powergui中的FFT Analysis可观察相电压和线电压的频谱图。 建立3个M文件分别用来编写触发脉冲波形、电流波形、电压波形的作图程序,其程序设计分别如下:
①触发脉冲波形作图程序