电流滞环跟踪PWM仿真
- 格式:wps
- 大小:846.09 KB
- 文档页数:18
目录摘要 (1)关键词 (1)一、电流滞环跟踪控制原理 (2)二、三相电流滞环跟踪控制系统的仿真 (5)1、建立系统仿真模型 (5)2、模块参数设置 (6)3、电路封装 (8)4、作图程序设计 (10)三、仿真波形及频谱分析 (12)四、仿真结果分析与总结 (18)1、仿真波形比较 (18)2、电流频谱分析比较 (19)3、相电压、线电压频谱分析比较 (19)4、总结 (19)五、课设心得体会 (20)六、参考文献 (21)摘要:滞环控制是一种应用很广的闭环电流跟踪控制方法,通常以响应速度快和结构简单而著称。
在各种变流器控制系统中,滞环控制单元一般同时兼有两种职能,一则作为闭环电流调节器,二则起着PWM调制器的作用,将电流参考信号转换为相应的开关指令信号.然而,滞环控制的开关频率一般具有很大的不定性,高低频率悬殊,其开关频率范围往往是人们在进行滞环控制系统设计师比较关心的重要方面,只有明确开关频率的计算方法,才便于进行开关器件、滤波参数及滞环控制参数的选择。
电流跟踪型逆变器输出电流跟随给定的电流波形变化,这也是一种PWM控制方式。
电流跟踪一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减小,将输出电流与给定电流的偏差控制在一定范围内。
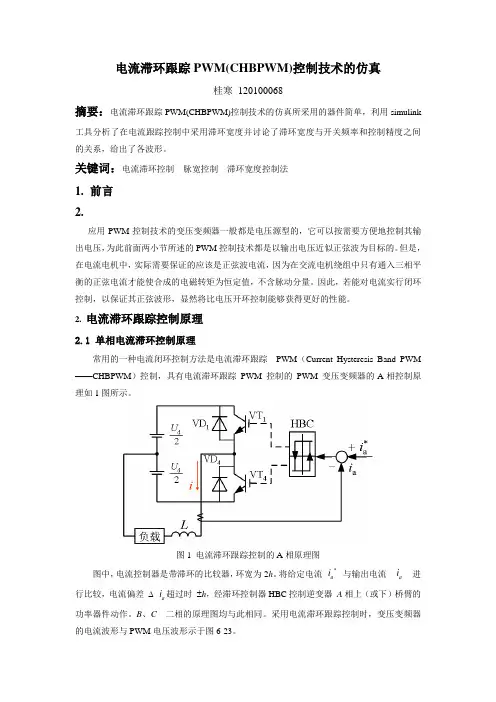
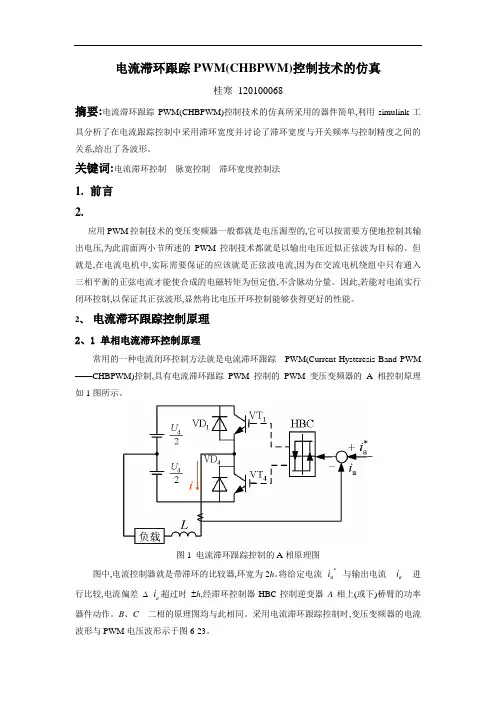
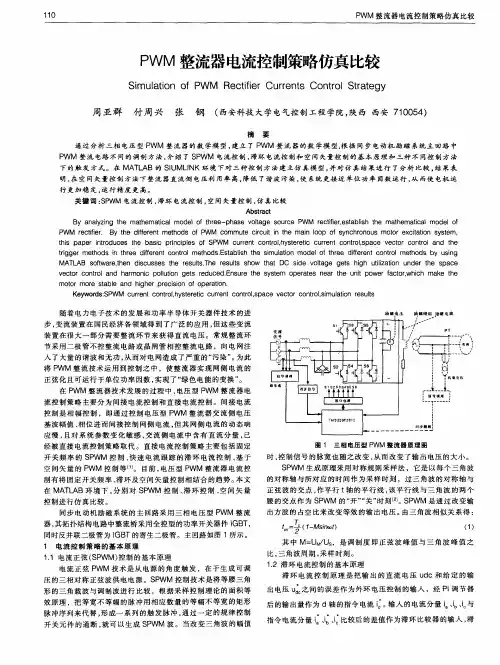
关键词:电流滞环跟踪PWM、闭环控制、滞环控制器HBC、环宽、电流偏差、开关频率、响应波形、频谱图一、电流滞环跟踪控制原理常用的一种电流闭环控制方法是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A相控制原理如1图所示.图1 电流滞环跟踪控制的A相原理图图中,电流控制器是带滞环的比较器,环宽为2h.将给定电流i*a 与输出电流i a进行比较,电流偏差D i a超过时±h,经滞环控制器HBC控制逆变器A相上(或下)桥臂的功率器件动作。
电流滞环跟踪PWM(CHBPWM)控制技术的仿真桂寒 120100068摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。
关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2.应用PWM 控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都是以输出电压近似正弦波为目标的。
但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
2. 电流滞环跟踪控制原理2.1 单相电流滞环控制原理常用的一种电流闭环控制方法是电流滞环跟踪 PWM (Current Hysteresis Band PWM ——CHBPWM )控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。
图1 电流滞环跟踪控制的A 相原理图图中,电流控制器是带滞环的比较器,环宽为2h 。
将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ∆ a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。
B 、C 二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
⏹ 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使a i 增大。
当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ⏹直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。
电流滞环跟踪PWM(CHBPWM)控制技术的仿真桂寒 120100068摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink 工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率与控制精度之间的关系,给出了各波形。
关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2.应用PWM 控制技术的变压变频器一般都就是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都就是以输出电压近似正弦波为目标的。
但就是,在电流电机中,实际需要保证的应该就是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
2、 电流滞环跟踪控制原理2、1 单相电流滞环控制原理常用的一种电流闭环控制方法就是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。
图1 电流滞环跟踪控制的A 相原理图图中,电流控制器就是带滞环的比较器,环宽为2h 。
将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ∆ a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。
B 、C 二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
⏹ 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使a i 增大。
当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ⏹直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。
三相逆变器电流滞环控制仿真
1仿真模型
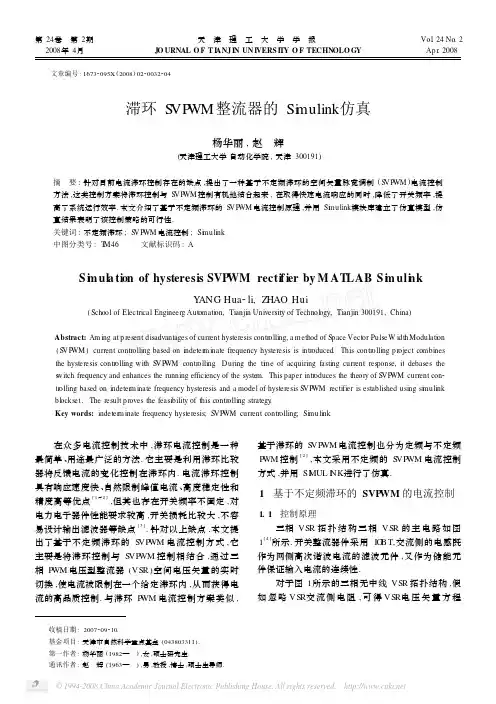
主电路如图1所示,使用“Three-Phase V-I Measurement”模块是为了检测实际的电流负载。
三相电流指令是相位互差的正弦信号。
图1 三相逆变器电流滞环控制仿真模型
电流滞环控制子系统模块(Current Regulator)内部结构如图2所示,滞环比较器采用的是“Relay”模块的环宽为0.2A。
图2 Current Regulator内部结构
2仿真结果分析与结论
交流相电压、相电流、线电压和直流电流波形在环宽分别为
、、和的图形分别如下。
负载谐波分析如下图图所示。
相电压和线电压的基本形状与SPWM逆变器类似。
电流近似正弦波,基本能够跟踪指令信号,在指令信号上下呈锯齿状波动。
负载电流的频谱与SPWM逆变器有着明显不同,它有各次谐波,不再像SPWM逆变器那样具有与载波频率有关的特定次谐波。
从环宽分别为、、和的交流相电压、相电流、线电压和直流电流波形可以看出,环宽过宽时,开关频率低,但跟踪误差增大;环宽过窄时,跟踪误差减小,但开关的动作频率过高,开关损耗随之增大。
什么是电流跟踪型PWM变流电路?采用滞环比较方式的电流跟踪型变流器有何特点?
电流跟踪型PWM变流电路是一种通过跟踪负载电流来控制输出电流的电路。
它通常用于要求精确控制和调节负载电流的应用,如电动机驱动、电源适配器等。
采用滞环比较方式的电流跟踪型变流器具有以下特点:
1.滞环比较方式:滞环比较方式是一种在电流跟踪型PWM
变流器中常用的控制方法。
该方式通过将参考电流与实际
负载电流进行比较,并应用滞回控制算法,调整PWM信
号的占空比,使输出电流跟踪参考电流。
2.高精度电流控制:滞环比较方式的电流跟踪型变流器具有
高精度的电流控制能力。
通过将滞环比较器设置为合适的
阈值,可以实现对输出电流的精确控制和调节。
该方式适
用于对负载电流要求较高的应用,能够实现精确的负载电
流跟踪和控制。
3.快速响应性能:采用滞环比较方式的电流跟踪型变流器具
有快速的响应速度。
由于滞环比较器能够快速调整PWM
信号的占空比,以响应负载电流的变化,因此可以实时动
态调整输出电流,并具有较好的过载能力和动态响应性能。
4.抗负载波动能力强:滞环比较方式的电流跟踪型变流器通
过及时调整PWM信号的占空比来跟踪负载电流,具有较
强的抗负载波动能力。
即使在负载电流发生变化的情况下,
也能够迅速调整输出电流,使其保持稳定。
需要注意的是,滞环比较方式的电流跟踪型变流器可能存在一些不足之处,如可能引入更多谐波成分和较高的开关频率。
因此,在应用中需要综合考虑设计需求和性能要求,选择合适的控制策略和优化方法,以实现最佳的电流跟踪和控制效果。
江苏科技大学本科毕业设计(论文)学院电气与信息工程学院专业电气工程及其自动化学生姓名班级学号指导教师魏海峰二零一四年六月江苏科技大学本科毕业论文无刷直流电机电流滞环控制策略No current hysteresis loop control strategy of DC motor江苏科技大学毕业设计(论文)任务书学院名称:电气与信息工程学院专业:电气工程及其自动化学生姓名:学号:指导教师:魏海峰职称:副教授摘要众所周知,无刷直流电动机控制系统具有新型的调速系统。
它具有结构简单、运行可靠、维修方便、调速性能好等优点。
它采用电子换相装置代替传统的有刷直流电动机中的电刷,解决了电机在运行中由电刷产生的摩擦引发的一些不良影响。
它运行性能高、控制方式简便、能够产生很好的经济效益、发展潜力巨大。
由于电力电子技术的飞速发展,无刷直流电动机的发展也日益突出。
现如今,无刷直流电动机在工农业生产以及人们的日常生活中获得了更为普遍的使用。
由于工业生产对电动机控制精度的要求,无刷直流电机对其驱动系统稳定性与及时性的要求越来越高,这就要求我们采取合理的控制系统,在电动机的发展中是极为重要的。
本文采用PI控制器来调节速度,电流控制器采用电流滞环控制,从而形成无刷直流电动机电流滞环控制系统。
本文中简单地描述了电机的基本结构,分析了电机的工作原理。
在Matlab/Simulink环境下运用各个相关的独立功能模块来搭建无刷直流电机的数学模型,从而实现对无刷直流电动机电流滞环控制系统实行仿真。
仿真和试验结果与理论分析一致,验证了该方法的合理性和有效性。
此方法也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:无刷直流电机,MATLAB/SIMULINK仿真,电流滞环控制系统AbstractAs everyone knows, the control system of Brushless DC motor with speed control system model. It has the advantages of simple structure, reliable operation, convenient repair, good speed performance etc. It uses electronic commutation device instead of the traditional electric brush DC motor, solved some adverse effects on the running of the motor by the brush friction generated by. Its high running performance, control mode is simple, can produce good economic benefits, a huge potential for development. Because of the rapid development of power electronics technology, the development of the Brushless DC motor is also increasingly prominent. Nowadays, the brushless DC motor in industrial and agricultural production and people's daily life was more widely used. Industrial production due to the motor control precision, brushless DC motor to drive the system stability and timeliness of the increasingly high demand, which requires us to take reasonable control system, the motor development is extremely important.This paper uses PI controller to adjust the speed, current controller based on hysteresis current control, thus forming a brushless DC motor hysteresis current control system. This paper describes the basic structure of motor, analyzes the working principle of motor. In the Matlab/Simulink environment using the independent functional modules related to build the mathematical model of Brushless DC motor, so as to realize the simulation of Brushless DC motor based on hysteresis current control system. Simulation and experimental results agree with the theoretical analysis, verified the rationality and validity of the method. This method can be applied to verify the rationality of other control algorithms, and provides a new idea for the design and debugging of the actual control system of motor. Keywords:BLDCM; Matlab/Simulink simulation; hysteresis current;目录第一章绪论 (1)1.1 研究背景 (1)1.2 研究现状与分析 (2)1.3 研究目的及意义 (4)1.4 本文的主要内容 (5)第二章无刷直流电机的结构、原理及数学模型 (6)2.1 无刷直流电机的基本结构 (6)2.1.1电动机本体 (6)2.1.2电子开关电路 (7)2.1.3位置传感器 (8)2.2 无刷直流电机的工作原理 (9)2.3 无刷直流电动机的数学模型 (12)2.3.1无刷直流电机的电压方程 (12)2.3.2电磁转矩 (13)2.3.3状态方程 (13)2.3.4电机的等效电路图 (14)第三章无刷直流电机电流滞环控制策略 (15)3.1 转速、电流反馈控制直流调速系统 (15)3.1.1转速、电流反馈控制直流调速系统的组成及其静特性 (15)3.1.2转速、电流反馈控制直流调速系统的数学模型与动态过程分析 (16)3.2 电流滞环控制原理 (18)3.3 转速PI调节器原理和分析 (18)3.3.1PID调节器的原理 (19)3.3.2双闭环PI调节的分析 (19)第四章基于MATLAB的无刷直流电机电流滞环控制 (21)4.1 MATLAB/SIMULINK的介绍 (21)4.1.1MATLAB的简介 (21)4.1.2S IMULINK的优点与创建模型步骤 (21)4.2 无刷直流电机电流滞环控制系统各模块的建立 (22)4.2.1电机本体模块 (22)4.2.2转矩计算模块 (26)4.2.3转速计算模块 (27)4.2.4电流滞环控制模块 (27)4.2.5速度控制模块 (28)4.2.6参考电流模块 (28)4.2.7电压逆变器模块 (29)4.2.8位置传感器模块 (31)4.3 无刷直流电动机电流滞环控制系统总图 (32)第五章系统仿真与结果分析 (33)5.1 仿真结果 (33)5.2 结论 (40)结语 (41)致谢 (42)参考文献 (43)第一章绪论1.1 研究背景在一百多年的时间里,电动机的发展已经得到了许多的变革,种类也呈现多样性,但现在最常见也是最主要的是同步电动机、异步电动机和直流电动机这三类。
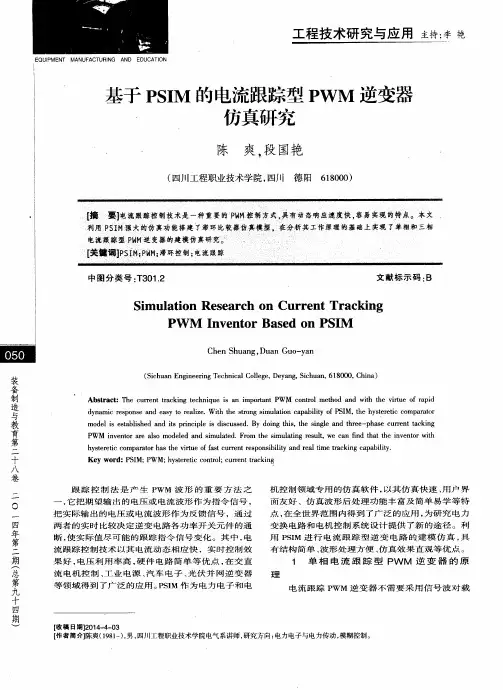
三相PWM整流器滞环电流控制仿真
梁骁;王辉;冯勇;阮倩茹
【期刊名称】《计算机仿真》
【年(卷),期】2010(027)010
【摘要】三相PWM整流器已广泛应用工业与电气控制领域,电流控制技术决定着三相PWM整流器系统的控制性能.综合比较了各种电流控制方法,应用较多的滞环比较PWM电流控制技术基本原理进行分析,表明常规滞环电流控制开关频率变化的随机性.为了达到开关频率恒定,消除随机误,通过引入三角载波比较的方法解决常规滞环电流控制中的开关周期不固定的缺点,采用MATLAB/Simulin软件搭建系统模型,对方案进行仿真验证,结果表明,采用三角波的固定开关频率滞环电流方案能获得良好的控制效果.
【总页数】4页(P259-262)
【作者】梁骁;王辉;冯勇;阮倩茹
【作者单位】湖南大学电气与信息工程学院,湖南,长沙,410082;湖南大学电气与信息工程学院,湖南,长沙,410082;湖南大学电气与信息工程学院,湖南,长沙,410082;湖南大学电气与信息工程学院,湖南,长沙,410082
【正文语种】中文
【中图分类】TM4
【相关文献】
1.新型三相PWM整流器自适应滞环电流控制 [J], 郑秀聪;谢运祥;谢涛
2.基于电压空间矢量的有源滤波器滞环电流控制仿真分析 [J], 王晶波
3.硬件在环实时仿真系统延迟对滞环电流控制仿真影响研究 [J], 周宏林;吴小田;代同振
4.电流滞环跟踪PWM逆变器控制仿真研究 [J], 赵卓鹏;贾石峰
5.三相PWM整流器滞环空间矢量控制的研究 [J], 徐文娟;张子林
因版权原因,仅展示原文概要,查看原文内容请购买。
题目:三相PWM整流器的电流闭环控制仿真三相PWM整流器参数:直流侧电压700V,三相交流电网380V,电感2mH。
1)基于电压前馈解耦控制的三相PWM整流器电流闭环仿真模型,实现如下功能:a)S-function根据“PWM整流器交流侧稳态矢量关系”的输入条件,实现各典型工况的仿真。
b)修改控制模型为前馈解耦控制,对比测试功率因数为1和-1的结果。
2)修改控制周期T_Control,分析控制周期对变换器输出特性的影响,并分析原因和相应的修改建议。
3)完成作业报告;1、未加前馈解耦三相PWM整流器仿真波形。
整流工况,功率为1时,仿真波形:逆变工况,功率为-1时,仿真波形:2、基于电压前馈解耦控制的三相PWM整流器电流闭环仿真模型根据以上原理,在MATLAB中搭建仿真模块,可以得到如下模型:图4仿真框图仿真参数:离散模式(仿真步长1e-6);直流母线电压为700V;交流侧功率Pn=75000W;三相交流电网380V;直流侧电容2.3mF;电感2mH。
给定电压为150V,fs为60Hz;仿真结果分析:仿真结果如下:整流工况,功率为1时:图5交流侧电压与电流波形图6直流侧电压波形图7D轴电流波形图8Q轴电流波形逆变工况,功率为-1时:在直流侧加一个1400V直流电源当做为反电动势,仿真框图如下:图9逆变时仿真框图图10交流侧电压与电流波形图11直流侧电压波形图12D轴电流波形图13Q轴电流波形从上可以看出处于整流工况时,电压与电流同相位,同时d轴电流标幺值为1,q轴电流标幺值接近为0;当处于逆变工况时,电压与电流相差90度,同时d轴电流标幺值为-1,q轴电流标幺值接近为0.3、修改控制周期T_Control,分析控制周期对变换器输出特性的影响,并分析原因和相应的修改建议。
修改控制周期T_Control,在整流工况,功率为1时,可以的到如下仿真结果:T_Control=5e-5时,仿真结果:T_Control=2e-4时,仿真结果:T_Control=5e-4时,仿真结果:T_Control=1e-3时,仿真结果:分析以上波形可看出,随着T_control增大,即开关频率和控制频率减小时,交流侧电流的谐波在不断地增大,而且谐波主要是集中在基频整数倍附近。
交流调速系统仿真实验报告——电流滞环跟踪PWM控制技术专业:电气工程及其自动化班级:11电牵4班姓名:***在班编号:26指导老师:***实验日期:2014年10月4日一、实验名称:电流滞环跟踪PWM(CHBPWM)控制技术。
二、目的及要求了解并掌握电流滞环跟踪PWM(CHBPWM)控制电路的工作原理; 2.掌握MATLAB中对Simulink的使用及构建模块; 3.熟悉掌握用MA TLAB绘图的技巧。
三、实验原理1电流滞环跟踪PWM(CHBPWM)控制电路的原理,如图一所示:图中,电流控制器是带滞环的比较器,环宽为2h。
将给定电流 i*a 与输出电流 ia 进行比较,电流偏差ia 超过时h,经滞环控制器HBC控制逆变器 A相上(或下)桥臂的功率器件动作。
B、C 二相的原理图均与此相同。
如果, ia < i*a ,且i*a - ia ≥ h,滞环控制器 HBC输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。
当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大直到达到ia = i*a + h ,ia = –h ,使滞环翻转,HBC输出负电平,关断V1 ,并经延时后驱动V4但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。
此后,逐渐减小,直到时,,到达滞环偏差的下限值,使 HBC 再翻转,又重复使导通。
这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。
从图 2 中可以看到,输出电流是十分接近正弦波的。
图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。
可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
因此,输出相电压波形呈PWM状,但与两侧窄中间宽的SPWM波相反,两侧增宽而中间变窄,这说明为了使电流波形跟踪正弦波,应该调整一下电压波形。
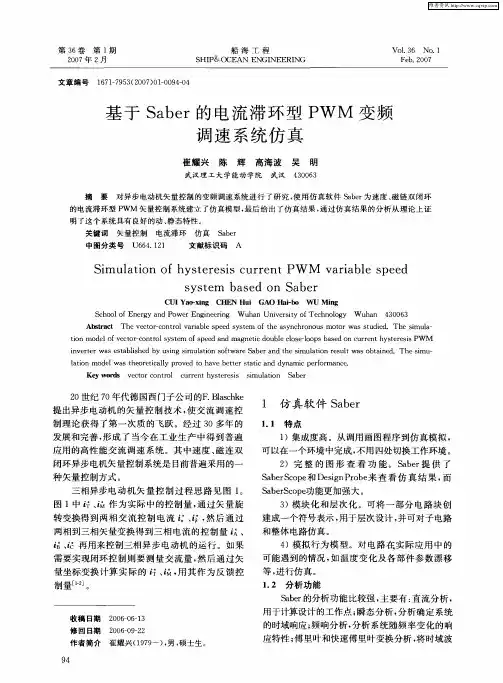
一种新颖滞环PWM控制技术的仿真研究李宋【摘要】随着电力电子技术的发展,变流器及其控制策略在交流传动领域得到了广泛应用.对电压型逆变器来说,电流滞环跟踪PWM控制是一种实现简单、运行可靠的控制技术,但传统的电流滞环控制,负载电流在开关频率频带上的谐波失真较大,通过采用一种随机带宽滞环控制的方法,可以扩展负载电流在开关频率旁频带附近的带宽,减小负载电流的谐波失真.仿真结果验证了该方法的正确性和可行性.【期刊名称】《华东交通大学学报》【年(卷),期】2009(026)006【总页数】4页(P48-51)【关键词】随机带宽;电流滞环;计算机仿真【作者】李宋【作者单位】华东交通大学,电气与电子工程学院,江西,南昌,330013【正文语种】中文【中图分类】TM464对于电压型逆变器PWM调制技术而言,常用的方法主要有:正弦脉宽调制技术(Sinusoidal Pulse Width Modulation,SPWM)、特殊谐波消除调制技术(Seleted Harmonic Elimination PWM,SHEPWM)、空间电压矢量调制技术(Space Vector PWM,SVPWM)和电流滞环跟踪控制技术(Current Hysteresis Band PWM,CHBPWM)。
这几种方法各有优缺点[1]:SPWM调制技术具有控制简单、易实现等优点,但控制效果一般,输出电压的THD较大。
SHEPWM可以在较低的开关频率下得到品质较好的电压波形,但是该方法需要求解超越方程组,而且所需要消除的谐波数越多,超越方程组越复杂,因此该方法只适用于离线计算、在线查表的控制,不能实现实时计算、实时控制。
SVPWM技术具有高电压利用率、谐波含量低等优点,但是该方法在合成电压空间矢量时比较复杂。
CHBPWM 是通过对逆变器电流实行闭环控制,使逆变器输出电流尽可能接近于正弦,这使得电机电磁转矩近似恒定,因此可以减少噪声和机械振动,但是对于传统的电流滞环控制技术而言,它在开关频率旁频带周围基本上是没有频谱分布的。
题目七电流滞环跟踪PWM(CHBPWM)控制技术的仿真摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。
关键词:电流滞环控制脉宽控制滞环宽度控制法一、前言应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。
但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
二、电流滞环跟踪控制原理常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。
图1 电流滞环跟踪控制的A相原理图图中,电流控制器是带滞环的比较器,环宽为2h。
将给定电流i*a 与输出电流i a进行比较,电流偏差∆i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。
B、C二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
⏹如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。
当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大⏹直到达到i a= i*a+ h,∆i a = –h,使滞环翻转,HBC输出负电平,关断V1 ,并经延时后驱动V4但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。
此后,逐渐减小,直到时,,到达滞环偏差的下限值,使HBC 再翻转,又重复使导通。
这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。
从图2 中可以看到,输出电流是十分接近正弦波的。
图2 电流滞环跟踪控制时的电流波形图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。
可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
图3 三相电流跟踪型PWM逆变电路图4 三相电流跟踪型PWM逆变电路输出波形因此,输出相电压波形呈PWM状,但与两侧窄中间宽的SPWM波相反,两侧增宽而中间变窄,这说明为了使电流波形跟踪正弦波,应该调整一下电压波形。
电流跟踪控制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。
当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。
这是一对矛盾的因素,实用中,应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
电流滞环跟踪控制方法的精度高,响应快,且易于实现。
但受功率开关器件允许开关频率的限制,仅在电机堵转且在给定电流峰值处才发挥出最高开关频率,在其他情况下,器件的允许开关频率都未得到充分利用。
为了克服这个缺点,可以采用具有恒定开关频率的电流控制器,或者在局部范围内限制开关频率,但这样对电流波形都会产生影响。
采用滞环比较方式的电流跟踪型PWM交流电路有以下特点:(1)硬件电路简单;(2)属于事实控制方式,电流反应快;(3)不需要载波,输出电压波形中不含有特定频率的谐波分量;(4)和计算法及调制法相比,相同开关频率时输出电流中高次谐波含量较多;(5)属于闭环控制,这是各种跟踪型PWM交流电路的共同特点。
三:三相电流的滞环跟踪控制的simulink的仿真三相电流跟踪型PWM逆变电路:主电路subsystem内部图:封装主电路:Simulink仿真时间参数设置:示波器设置:负载设置:滞环设置:直流电源:给定正弦信号波:反馈参数设置:在MA TLAB中使用subplot作图:触发脉冲subplot(6,1,1);plot(ScopeData2.time,ScopeData2.signals(1).values,'r'); title('触发脉冲1');grid;axis([0,0.02,0,3]);subplot(6,1,2);plot(ScopeData2.time,ScopeData2.signals(2).values,'r'); title('触发脉冲2');grid;axis([0,0.02,0,3]);subplot(6,1,3);plot(ScopeData2.time,ScopeData2.signals(3).values,'r'); title('触发脉冲3');grid;axis([0,0.02,0,3]);subplot(6,1,4);plot(ScopeData2.time,ScopeData2.signals(4).values,'r'); title('触发脉冲4');grid;axis([0,0.02,0,3]);subplot(6,1,5);plot(ScopeData2.time,ScopeData2.signals(5).values,'r'); title('触发脉冲5');grid;axis([0,0.02,0,3]);subplot(6,1,6);plot(ScopeData2.time,ScopeData2.signals(6).values,'r'); title('触发脉冲6');grid;axis([0,0.02,0,3]);电流置换跟踪控制相电流subplot(3,1,1);plot(ScopeData1.time,ScopeData1.signals(1).values,'k'); title('电流滞环跟踪控制A相电流');grid;axis([0,0.04,-25,25]);grid on;subplot(3,1,2);plot(ScopeData1.time,ScopeData1.signals(2).values,'k'); title('电流滞环跟踪控制B相电流');grid;axis([0,0.04,-25,25]);grid on;subplot(3,1,3);plot(ScopeData1.time,ScopeData1.signals(3).values,'k'); title('电流滞环跟踪控制C相电流');grid;axis([0,0.04,-25,25]);grid on;电流滞环跟踪控制电压subplot(4,1,1);plot(ScopeData.time,ScopeData.signals(1).values,'k'); title('电流滞环跟踪控制A相相电压');grid;axis([0,0.02,-220,220]);grid on;subplot(4,1,2);plot(ScopeData.time,ScopeData.signals(2).values,'k'); title('电流滞环跟踪控制B相相电压');grid;axis([0,0.02,-220,220]);grid on;subplot(4,1,3);plot(ScopeData.time,ScopeData.signals(3).values,'k'); title('电流滞环跟踪控制C相相电压');grid;axis([0,0.02,-220,220]);grid on;subplot(4,1,4);plot(ScopeData.time,ScopeData.signals(4).values,'k');title('电流滞环跟踪控制BC相相电压');grid;axis([0,0.02,-440,440]);grid on四.各仿真波形(1)当滞环脉宽2h=5时的仿真结果触发脉冲波形电流波形电压波形相电压相电压频谱图触发脉冲波形电流波形电压波形相电压线电压频谱图五,仿真结果分析电流跟踪控制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。
当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。
这是一对矛盾的因素,实用中,应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
采用滞环比较方式的电流跟踪型PWM交流电路有以下特点:(1)硬件电路简单;(2)属于事实控制方式,电流反应快;(3)不需要载波,输出电压波形中不含有特定频率的谐波分量;(4)和计算法及调制法相比,相同开关频率时输出电流中高次谐波含量较多;(5)属于闭环控制,这是各种跟踪型PWM交流电路的共同特点。
六、心得体会这次的课程设计让我了解到了MATLAB这个软件强大的科学计算能力,让我掌握了MATLAB简单易用的编程语言,让我体验到了MATLAB 友好的工作平台和编程环境。
这个的课程设计让我了解了MATLAB的一般操作步骤,能比较熟练地运用MATLAB对电路原理中的一些问题进行仿真,并能够用一些简单的画图函数生成仿真的图像。
通过了本次课程设计,我学会了使用simulink来解决一些电力电子仿真,一道很基础简单的电力电子题目,让我对一款很软件有了一个比较系统的认识,这对我以后的学习和研究会产生很好的影响。
本来一个复杂的系统,通过simulink仿真可以很快的知道结果,同时可以对系统的一些参数进行调节可以得到跟好的仿真结果,这对研究复杂系统起到了很好的辅助作用,对复杂系统参数的选定也起到了很大的作用。
这一切都让我对这款软件产生了极高的好感。
总而言之,使我对matlab有了更加深入的理解,它在自动化等电子专业中的应用是如此广泛,而对于本专业来说更是一个不可或缺的工具。
我相信,通过对matlab的加强学习对以后专业知识的学习一定有更加大的帮助。
七,参考文献1,黄忠霖黄京《控制系统MATLAB计算机及仿真》(第3版)北京:国防工业出版社,20092,王兆安黄俊主编《电力电子技术》(第4版)北京:机械工业出版社,20023,刘卫国主编《MA TLAB程序设计与应用》(第2 版)北京:高等教育出版社,20064,洪乃刚主编《电力电子,电机控制系统的建模和仿真》北京:机械工业出版社,2002。