计算机图形学_第十一章_三维形体的表示
- 格式:ppt
- 大小:3.42 MB
- 文档页数:51
17春《计算机图形学》作业_1一、单选题1. 按照所构造的图形对象来分,点、曲线、平面、曲面或实体属于___,而山、水、云、烟等自然界丰富多彩的对象属于___。
A. 规则对象、不规则对象B. 规则对象、属性对象C. 不规则对象、几何对象D. 不规则对象、属性对象答案A2. Bezier特征多边形的第一条边表示了Bezier曲线()A. 在终点处的切矢量方向B. 在起点处的切矢量方向C. 在任意点处的切矢量方向D. 以上说法都不对答案B3. Bezier曲线不具备的性质有___。
A. 对称性B. 几何不变性C. 局部控制性D. 凸包性答案C4.答案B5. 在直角坐标系下,平面曲线f(x,y)=0可将平面分为___个点集,当f(x,y) 大于0时,表示的点集为其正侧,至于是曲线的外部还是内部则依赖于曲线的方向。
A. 1B. 2C. 3D. 4答案C6. 在判断由P1,P2,P3三个点构成的折线的方向时,可以通过计算___的符号来判断其方向,若其符号为负,则表示折线方向为正。
A. |P1×P2×P3|B. |(P1-P2) ×(P2-P3)|C. |(P2-P1) ×(P3-P1)|D. |(P1-P2)·(P2-P3)|答案B7. 由空间的n+1个控制点生成的k次准均匀B样条曲线是由若干段B样条曲线逼近而成的, ()A. 每个曲线段的形状仅由点列中的k个顺序排列的点所控制B. 每个曲线段的形状仅由点列中的k+1个顺序排列的点所控制C. 每个曲线段的形状仅由点列中的k+2个顺序排列的点所控制D. 每个曲线段的形状仅由点列中的k+3个顺序排列的点所控制答案B8. 用转角法判别点在区域的内外。
将点M与边界上一点P连接,当P沿边界移动一周时,M点处于区域外的是___。
A. MP与给定的某条直线夹角变化值为0B. MP与给定的某条直线夹角变化值为2πC. MP与给定的某条直线夹角的变化值为πD. MP与给定的某条直线夹角的变化值为3π答案A9.答案C10. 以下哪一个不是绘制一个象素宽的直线的常用算法()A. 数值微分法B. 中点分割算法C. Bersenham算法D. 中点画线法答案B11.答案B12. Bezier曲线上各点均落在()A. 均落在相应Bezier特征多边形构成的凸包之中B. 均落在相应Bezier特征多边形构成的凸包之外C. 既可落在相应Bezier特征多边形构成的凸包之中,也可落在相应Bezier特征多边形构成的凸包之外D. 均落在相应Bezier特征多边形上答案A13. 下列有关平面几何投影的叙述,错误的是___。
【题型】填空题1、三维图形的几何变换有平移、比例、对称、错切、旋转、投影、_透视变换_等变换。
2几何图形的布尔运算主要是两个图形对象的_联合/Union、交集/Intersection、差集/Subtraction三种运算。
3交互式绘图系统的基本交互任务包括:定位、选择、文本输入和数值输入。
4 减少或克服图形失真的技术叫做__反走样__。
5在绘制物体图形时消除被遮挡的不可见的线或面,称为消隐__。
6灭点可以看作是无限远处的一点在投影面上的_投影_。
7深度缓冲器算法最简单常用的面向应用的用户接口形式:子程序库、专用语言和交互命令。
8在计算机图形学中,被裁剪的对象可以是线段、多边形和字符三种形式。
9图形用户界面的基本元素有_窗口_、图标、菜单、指点装置。
10双线性法向插值法(Phong Shading)的优点是_高光域准确__。
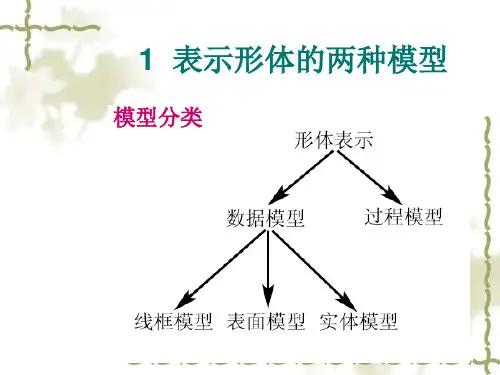
11表现三维形体的模型有线框模型、表面模型和_实体模型_。
12三视图投影包括正投影、水平投影、_侧投影_。
13计算机中字符由一个_数字编码(编码)_唯一标识。
14区域可分为4向连通区域和__8_向连通区域。
15计算机字库分为矢量型和__点阵_型两种。
16光栅图形显示器具有闪烁和_锯齿_现象。
17裁剪的目的是为了使位于_窗口_外的图形不显示出来。
18目前常用的PC图形显示子系统主要由3个部件组成:帧缓冲存储器、_显示控制器、ROM BIOS。
19计算机图形学以___计算几何_为理论基础。
20在图形文件系统中,点、线、圆等图形元素通常都用其_几何特征参数_来描述。
21投影线从视点出发,主灭点最多有__3_个,任何一束不平行于投影面的平行线的透视投影将汇成一点。
22在处理图形时常常涉及的坐标有模型坐标系、观察坐标系、世界坐标系和_设备坐标系__。
23屏幕上最小的发光单元叫做_____象素点__________。
24扫描线的连贯性是多边形区域连贯性在_____一条扫描线上__________的反映。

计算机图形学中的三维建模方法和理论计算机图形学是一门涉及多个学科的交叉领域,其中三维建模是图形学中的重要研究方向之一。
三维建模即指将虚拟的三维物体通过计算机进行建模,使之具有逼真的外观和动态效果。
三维建模技术可以用于工业设计、影视特效、游戏开发等多个领域,因此在计算机图形学中占据着重要地位。
三维建模技术最基础的概念是“模型”,模型是一个虚拟的、数字化的三维物体。
在计算机图形学中,有很多种不同的模型表示方法。
其中,最常见的表示方法是基于网格的多边形模型。
该模型以三角形、四边形等形状的网格为基础,将物体表面分割成数以千计的小面片,然后组成完整的物体形状。
同时,还有基于曲面的模型表示方法,例如贝塞尔曲面、NURBS曲线等。
这种表示方法相比于基于网格的多边形模型,可以更好地表达出物体的曲面特征。
在三维建模中,最基础的操作是点、线、面。
点即是空间中的一个坐标,线即连接两个点的直线,面即是由三个或以上点以及它们所连接的线构成的平面图形。
这些基础操作是构建三维模型的基石。
在建模过程中,需要不断地在三维空间中添加和移动点,以及连接和调整点之间的线和面,从而逐步构建出更加复杂的三维形状。
除了基础操作之外,三维建模中还有很多高级操作,例如布尔运算、变形、抽象等。
布尔运算是指将两个或多个物体进行比较、合并或分割。
变形则是通过对物体的各种部位进行拉伸、扭曲等操作,使之具有更逼真的外观和动态效果。
抽象则是指将一个复杂的物体分解成多个简单的子部分进行建模,从而更合理地表达出物体的各种特征。
在三维建模中,还有一些常用的建模软件和工具。
其中,最常见的软件包括3DS Max、Maya、Blender等。
这些软件都是面向三维建模的专业软件,具有强大的建模功能和各种特效插件,可以帮助建模人员轻松创建高质量的三维模型。
除了传统的三维建模方法之外,还有一些新兴的三维建模技术,例如体素(voxels)建模技术、光线跟踪技术等。
体素建模技术是一种基于三维像素表示的建模方法,它能够让建模人员更精确地控制物体内部的细节。