船舶操纵性能
- 格式:doc
- 大小:405.00 KB
- 文档页数:39
船舶操纵习题集(杲)第一章船舶操纵性能一、知识点1.船舶操纵性能船舶操纵性能包括船舶变速性能、旋回性能、航向稳定性和保向性、船舶操纵性指数(K、T指数)的物理意义及其与操纵性能的关系、船舶操纵性试验和IMO船舶操纵性衡准的基本内容。
2.船舶变速性能船舶变速性能包括船舶启动性能、船舶停车性能、倒车停船性能及影响倒车冲程的因素和船舶制动方法及其适用。
3.船舶旋回性能船舶旋回性能包括船舶旋回运动二个阶段及其特征、旋回圈及旋回要素的概念(旋回反移量、滞距、纵距、横距、旋回初径、旋回直径、转心、旋回时间、旋回降速、横倾等)、影响旋回性的因素和旋回圈要素在实际操船中的应用(反移量、旋回初径、进距、横距、旋回速率在实际操船中的应用,舵让与车让的比较)。
4.航向稳定性和保向性航向稳定性和保向性包括航向稳定性的定义及直线与动航向稳定性、航向稳定性的判别方法、影响航向稳定性的因素、保向性与航向稳定性的关系和影响保向性的因素。
5.船舶操纵性试验船舶操纵性试验包括旋回试验的目的、测定条件、测定方法,冲程试验的目的、测定条件、测定方法,以及Z形试验的目的和试验方法。
二、练习题(一)选择题(请选择一个正确或最合适的答案)1.船舶启动过程中,为保护主机。
A.先开高转速,在船速达到与转速相应的船速时再逐级减小转速B.先开低转速,在船速达到与转速相应的船速时再逐级加大转速C.先开低转速,在螺旋桨转动起来后就开高转速D.先开低转速,在转速达到相应的转速时再逐级增大转速2.船舶由静止状态进车,达到相应稳定航速的前进距离。
A.与船舶排水量成正比,与相应稳定船速的平方成正比B.与船舶排水量成正比,与相应稳定船速的平方成反比C.与船舶排水量成反比,与相应稳定船速的平方成正比D.与船舶排水量成反比,与相应稳定船速的平方成反比3.船舶由静止状态进车,达到相应稳定航速的前进距离。
A.与船舶排水量成正比,与达到相应稳定航速时的螺旋桨推力成正比B.与船舶排水量成正比,与达到相应稳定航速时的螺旋桨推力成反比C.与船舶排水量成反比,与达到相应稳定航速时的螺旋桨推力成正比D.与船舶排水量成反比,与达到相应稳定航速时的螺旋桨推力成反比4.船舶由静止状态进车,达到相应稳定航速的时间。
船舶操纵性能预报及改善简介:船舶操纵性是指船舶按照设计者的意图保持或者改变其运动状态的性能,即船舶保持或改变其航速、航向和位置的性能。
船舶的操纵性包括:航向稳定性、回转性、转首性、跟从性和停船性能。
船舶操纵性预报的主要内容:船舶操纵运动的水动力预报,船舶回转运动时回转轨迹及主要特征参数的预报,Z形操舵试验中的Z形曲线的预报和停船性能有关参数的预报重要性:船舶操纵性是船舶航行的重要性能之一,和船舶的航行安全性密切相关现状:1.由于操纵性问题本身的复杂性和船东从营运效率考虑,对操纵性的关心远不如对快速性等性能的关心,因而操纵性没有得到应有的重视2.近十多年来,国内外造船界对船舶操纵性越来越重视,国际上船舶操纵性研究突飞猛进,取得了惊人的进展。
发展:1.国际海事组织(Intemational Maritime Organization,IMO)在船舶操纵性评估和制定船舶操纵性标准方面的工作引起了人们对船舶操纵性的重视2.船舶水动力学学科及其相关数值和实验技术的进步使研究船舶操纵性这种复杂的问题成为了可能操纵性能预报的方法:1、数据库方法----限制较大;使用方便2、自由自航船模试验方法----尺度效应;费用昂贵;3、利用船舶运动数学模型进行仿真计算方法----精度达工程计算要求;方便实用4、基于CFD技术的数值模拟方法----纯数值;可模拟波浪中操纵性5、神经网络方法(人工神经网络和BP神经网络)----非线性动态系统改善操纵性能的措施:1、舵的设计正确----合适的种类和外形尺寸2、船体主要尺度和型线的正确选择(船长,主尺度比,方形系数,纵中剖面面积,首尾部形状对水动力导数的影响)----协调航向稳定性和回转性之间的矛盾3、设计特种操纵装置----推进、操纵合一装置;主动式转向装置;特种舵数据库方法自由自航船模试验方法----尺度效应;费用昂贵;利用船舶运动数学模型进行仿真计算方法----精度达工程计算要求;方便实用基于CFD技术的数值模拟方法----纯数值;可模拟波浪中操纵性神经网络方法(人工神经网络和BP神经网络)----非线性动态系统。
第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
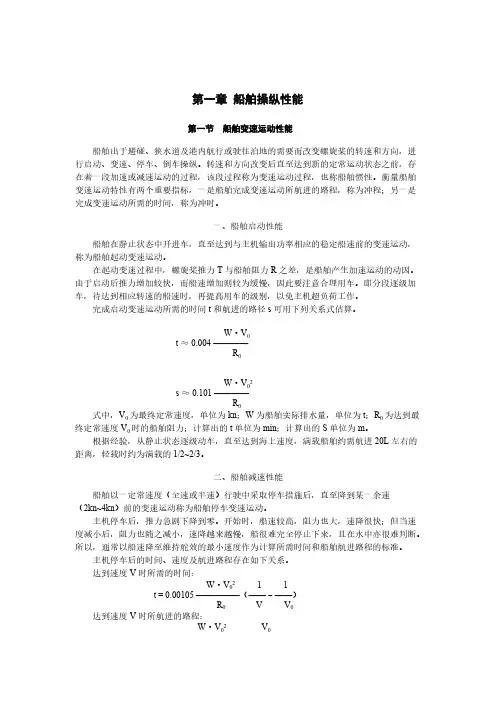
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈ 0.004 ————R0W·V02s ≈ 0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(—— - ——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 ————— ℓn (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
B .转向角速度较小,角加速度较小D .转向角速度较大,角加速度较小B .横移速度较小,横移加速度较大D .横移速度较大,横移加速度较小第一章船舶操纵性能0001船舶以一定的速度直航中操一定的舵角并保持之,船舶进入回转运动的性能称为A .船舶的保向性能B .船舶的旋回性能C •船舶的变速性能D •船舶的改向性能0002直航船操一定舵角后,其转舵阶段的一 A .转向角速度较小,角加速度较大 C .转向角速度较大,角加速度较大0003直航船操一定舵角后,其转舵阶段的一 A .横移速度较小,横移加速度较小 C .横移速度较大,横移加速度较大0004 直航船操一定舵角后,其过渡阶段的一 A •横移速度为变量,横移加速度为常量 B •横移速度为常量,横移加速度为变量 C •横移速度为变量,横移加速度为变量 D •横移速度为变量,横移加速度为常量0005直航船操一定舵角后,其过渡阶段的一A .转向角速度为变量,角加速度为常量D .转向角速度为变量,角加速度为常量0006直航船操一定舵角后,其定常旋回阶段的一一。
A .转向角速度为常量,角加速度为变量B .转向角速度为变量,角加速度为零C .转向角速度为变量,角加速度为变量0007直航船操一定舵角后,其定常旋回阶段的一一。
A .横移速度为常量,横移加速度为变量B .横移速度为变量,横移加速度为零C .横移速度为变量,横移加速度为变量0008船舶在旋回运动过程中,其首、尾转动情况为一一。
C .船首向操舵一侧转动,船尾向操舵一侧转动D .船首向操舵相反一侧转动,船尾向操舵相反一侧转动0009船舶在旋回运动过程中,其首、尾转动量的大小与重心旋回轨迹相比较,A .船首比船尾向操舵相反一侧转动量大B .船尾比船首向操舵相反一侧转动量大C .船首比船尾向操舵一侧转动量大D .船尾比船首向操舵一侧转动量大0010旋回圈是指直航中的船舶操左(或右)满舵后一- A .船尾端描绘的轨迹B .重心描绘的轨迹C .转心户描绘的轨迹D .船首端描绘的轨迹0011驾驶台展示的船舶操纵性资料中,其旋回圈一一。
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
船舶动力学与操纵性能分析船舶动力学是研究船舶在不同水体中的运动、力学效应以及受外界影响时的动力响应。
船舶的操纵性能则是指船舶在不同条件下对操纵指令的响应能力和灵敏度。
本文将对船舶动力学及其操纵性能进行分析与讨论。
一、船舶动力学分析船舶动力学分析是研究船舶在液体介质中受到的各类力学效应。
主要包括以下几个方面:1. 流体阻力:船舶在水体中运动时,会受到阻力的影响。
阻力的大小与水体的黏性、船舶的外形、速度等有关。
2. 惯性力:当船舶受到外力作用时,会产生惯性力,使船舶发生运动。
例如船舶的加速度、减速度等。
3. 水动力效应:船舶在水中前进时会产生侧滑、纵向力和横向力等水动力效应,影响船舶的稳定性和操纵性。
4. 波浪力:在海洋或湖泊中航行时,船舶会受到波浪力的影响,产生起伏和摇晃。
二、船舶操纵性能分析船舶操纵性能是指船舶对操纵指令的响应能力和表现出的灵敏度。
良好的船舶操纵性能对于船舶的安全和操作效率至关重要。
下面分析几个影响船舶操纵性能的因素:1. 转向性能:船舶在转向时需要良好的稳定性和灵活性。
相关因素包括船舶的操纵设备、舵的设计和位置、船舶的结构等。
2. 加速性能:船舶在加速时需要有较好的推进力和动力性能,以便快速响应操纵指令。
3. 刹车性能:船舶在减速或停止时需要有有效的刹车装置和刹车性能,以确保船舶的安全停靠。
4. 效益性:良好的船舶操纵性能还应考虑船舶的燃油消耗、航速与操纵指令的关系等问题。
三、船舶动力学与操纵性能的优化要优化船舶的动力学和操纵性能,需要综合考虑船舶的设计、结构、动力系统等方面的因素,下面列举几个优化的方向:1. 船舶外形设计:通过减少船舶的阻力,改善船舶的流线型外形,可以提高船舶的运动效率和操纵性能。
2. 推进系统优化:船舶的推进系统是关键的动力装置,优化推进系统的结构和性能,可以提升船舶的加速性能和操纵性能。
3. 操纵设备改进:改进船舶的操纵设备,包括舵、操纵系统等,可以提高船舶的转向性能和灵敏度。
{(1)定常旋回阶段第一章船舶操纵性基础1、定义:保向、改向、变速。
2、船舶操纵性能:①变速性能:(1)停船性能(2)启动性能(3)倒车性能②旋回性能③保向性能④航向稳定性能3、一些主要概念:①转心:转轴与船舶首位线交点(垂足)通常位于船首之后1/3L (船长)它的位置稍有移动②通常作用在船上的力及力矩:水动力、风动力、舷力、推力③漂角:船舶运动速度与船首位线的夹角4、①水动力及其力矩:水给予船舶的运动方向相反的力②特点:船前进时,水动力中心在船中前船后退时,水动力中心在船中后③附加质量:惯性质量及惯性矩大型船舶纵向附加质量≈0.07m (m 为船的质量)附加惯性矩≈1.0Iz (Iz 为船的惯性矩)④水动力角:水动力方向与船首位线的夹角它是漂角的函数,随它漂角的增大而增大⑤水动力中心大概位置:前进平吃水:漂角为0时,中心在船首之后1/4L (船速越低,越靠近船中,前进速度为0时,在船中)后退平吃水:漂角为0时,中心距船中1/4L⑥水动力距:与力矩系数水线下面积、船体形状有关力矩系数是漂角的函数5、船体阻力摩擦阻力→主要阻力占70%—90%速度越大,其值越大(与V 2成正比)兴波阻力(低速时:与V 2成正比;船高速时:急剧增大)涡流阻力空气阻力:约占2%附体阻力6、船舶的变速性能①停船性能(冲程):与惯性有关②冲程:往往是对水移动的距离(对水移动速度为0)③一般万吨船:倒车停船距离为6—8L倒车冲程:5万:8~10L 10万吨:10~13L 15—20万吨:13~16L④当船速降到60%~70%时,转速降到25%~35%倒车⑤换向时间:从前进三到后退三所需时间汽轮机:120s~180s 内燃机:90s~120s 蒸汽机:60s~90s7、船舶的旋回性:转船阶段①旋回圈:过渡阶段—变速旋回阶段{剩余阻力:附加阻力:{②旋回初径:操舵后航向转过180°时,重心移动的横向距离一般为3~6L③旋回直径:船定常旋回时,重心轨迹圆的直径通常为旋回初径的0.9~1.2倍④进距:开始操舵到航向转过任一角度,重心移动的纵向距离通常为旋回初径的0.6~1.2倍⑤横距:指操舵让航向转过任一角度,垂心所走的横向距离约为旋回初径的1/2倍⑥制距:操舵开始时的重心位置到定常旋回率重心的纵向距离1~2L(2)船舶旋回运动是舷力的横向分量、水动力横向分量共同作用的结果(3)船舶旋回运动中的性能:降速车旋回的初始阶段:内倾;定常旋回:外倾旋回时间:旋回360°所需的时间;万吨级船旋回时间约为:6min(4)影响旋回特性的因素:①方形系数大旋回性好旋回圈小②船首水线下面积多旋回性好旋回圈小③船尾有钝材或船首瘦削旋回性差旋回圈大④舵面积大旋回性好旋回圈小⑤吃水增大横距、旋回初径增大,反移量减小⑥横倾,影响较小:低速时,向底舷一侧旋回旋回性好高速时,向高舷一侧旋回旋回性好船速低于某一值时,旋回圈加大⑦浅水:水变浅阻力加大转船舵力作用小旋回圈大旋回性变差⑧旋回圈在实际操船中的应用:反移量(kick ):向操舵相反一舷移动的距离0.1~0.2L (10%~25%L )9、操纵指数:k r r T =+.(T :追随性指数.r :r 的导数角速度<r>的加速度k:旋回性指数)阻尼力矩惯性力矩=T (T 大,惯性大,实际操舵中T 越小越好)阻尼力矩转舵力矩=k (k 大,转舵效应好,实际操舵k 越大越好)无因次的k’、T’)(')('v L T T v L k k ==(k/T 表示舵效){{第二节航向稳定性及保向性1、船向稳定性定义:船受外力干扰,干扰消失后,不用舵的前提下,船能自动恢复直线运动①恢复到原航向平行的航向航向稳定性(方向稳定性)稳定性②彻底恢复到原航行完全相同的航向上③直线稳定航向稳定性:方形系数低,长/宽高的船航向稳定性好瘦船稳定性好船首侧面积大航行稳定性差(例如:球鼻首bulous)2、保向性概念:船首线运动受外力干扰通过用船纠正使其恢复到原航向与航迹上继续做直线运动一般来说:航向稳定性好的船保向性好3、影响保向性因素瘦船好浅吃水差船尾肥大(有钝材)好干舷高差尾倾较首倾好轻载比满载保向性好(如有风,另当别论)船速高好水深浅好逆风逆流好第三节变速性能补充1、启动性能:静止定常运动定常速度v、所需距离与排水量成正比,与v2成反比,与阻力成正比经验:满载启动距离20L轻载为满载的1/2~2/32、减速性能:停车冲程:对水速度为0通常对水移动能维持舵效的最低速度,即认为停船万吨级船2节、超大船3节,即认为停船一般货船停船冲程8~20L、超大船停船冲程20L3、制动性能:前进三后退三变螺距船CPP是FPP船紧急停船距离的60%~80%总结:排水量大停船距离大船速大停船距离大污底严重停船距离小主机功率大停船距离小顺流顺风停船距离大第四节船舶操纵性试验1、旋回试验:在直航情况下,左35°或右35°,使船旋回旋回试验的目的:测定旋回圈,评价船舶旋回性2、冲程试验冲程条件:风流小水深≥3Bd 采用投掷法测定倒车使船停下(这种试验)要求船首改变90°3、螺旋试验、逆螺旋试验该试验目的,判断船舶航向稳定性好坏逆螺旋试验:求取船舶达某一回旋角速度所需舵角4、Z 性试验该试验主要评价船舶首摇抑制性,也可测定旋回性,追随性,航向稳定性获得操纵性指数第五节IMO 要求1、①对旋回性:进距<4.5L 旋回初径<5L操10°舵角航向改变10°时的进距<2.5L②对停船性:全速倒车停船距离<15L超大船倒车停船距离<20L③对于首摇抑制性、保向性3、Z 型试验结果:左右10°舷角第一超越角:a 、当L/v <10s 时:<10°b 、当L/v >30s 时:<20°c 、当10s <L/v <30s 时:[5+21(L/v )]°第二超越角:a 、当L/v <10s 时:<25°b 、当L/v >30s 时:<40°c 、当10s <L/v <30s 时:<[17.5+0.75(L/v )]°第三章车、舵、锚、缆、拖船第一节螺旋桨(propeller )1、关于阻力的补充摩擦阻力占到70%~80%,它与大约船速1.852的次方成正比2、吸入流与排出流①进入螺旋桨的流吸入流:范围广、流速慢、流线平行②螺旋桨排出的流排出流:范围小、流速快、水流旋转3、推力有船速关系(还与滑失有关)推力:排出流对船的反作用力船速一定,螺旋桨转速高推力大螺旋桨转速一定,船速高推力小4、滑失:螺旋桨对水实际速度与理论上能前进速度之差理论速度滑失滑失比=螺旋桨推力主要取决于其转速及滑失比。
船舶操纵性能第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈0.004 ————R0W·V02s ≈0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(——-——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 —————?n (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
操纵性绪论操纵性定义:船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
操纵性内容:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
附加质量和附加惯性矩:作不定常运动(操纵和耐波运动)的船舶,除了船体本身受到愈加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度。
根据作用力和反作用力,水对船体存在反作用力,这个反作用力称为附加惯性力。
附加惯性力是与船的加速度成比例的,其比例系数称为附加质量。
船舶操纵一、操纵运动方程1.1坐标系一、固定坐标系:固定坐标系是固结在地球表面,不随时间而变化的,如图所示。
首向角ψ:X 0与X 的夹角(由X 0转向X ,顺时针为正)。
二、运动坐标系:运动坐标系是固结在船体上的,随船一起运动的,如图所示。
重心坐标:X OG 、Y OG ; 船速:V 重心G 瞬时速度; 航速角ψ0:X0轴与船速V 夹角(顺时针为正);漂角:β船速与X 轴夹角(顺时针为正); 回转角速度:γ=dψdt;回转曲率:R 右舷为正; 舵角:δ左舷为正。
三、枢心:回转时漂角为零点、横向速度为零的点。
1.2线性运动方程一、坐标转换00cos sin sin cos ψψψψ=-=+G G x u v y u v二、简化方程当重心在原点处:X G =0 运动坐标系一般方程:三、对于给定船型、给定流体中的运动情况船型参数和流体特性为已知条件; 操纵运动为缓变过程,忽略高阶小量; 忽略推进器转速影响;操舵过程短暂,忽略转舵加速度。
则可将给定船型流体中受力情况表示如下:由泰勒展开式,用水动力导数表示如下:四、简化后的操纵运动线性方程式:2()()()ψψψψψψ=--=++=++G G Z G X m u v x Y m v u x N I mx vu 00cos sin ψψ=+G G X mx my 00cos sin ψψ=-G G Y mymx ()()ψψψ=-=+=z X m u v Y m v u NI (,,,,,,)(,,,,,,)(,,,,,,)X X u v r u v r Y Y u v r u v r N N u v r u v r δδδ===v r v r v r v r Y Y v Y r Y v Y r Y N N v N r N v N r N δδδδ=++++=++++11111()()()()()()()()v v G r r G v v z r G r v ur v u u r r v u rm Y v Y v mx Y r mu Y r Y mx N v N v I N r mx u N r N δδδδ+=++∆+∆=+--+-+-=--+-+-=1.3水动力导数一、定义:匀速直线运动时,只改变一个运动参数,其他不变引起的作用于船舶水动力对运动参数的变化率。
什么是船舶的操纵性?什么是船舶的操纵性?船舶的操纵性是指船舶对外界干扰或操船人员操纵的反应能力,具体表现为船舶能够按照驾驶者的意图保持或改变其运动状态(航速、航向和位置)的性能。
操纵性好的船舶能够方便、稳定地保持运动状态,同时也能迅速、准确地改变运动状态,确保航行的安全性和效率。
操纵性的核心要素保持和改变运动状态操纵性首先体现在船舶能够稳定地保持其当前的运动状态,如航速、航向和位置。
当船舶处于稳定航行状态时,操纵性好的船舶不需要频繁调整舵角或主机转速,就能维持既定的航迹。
这种能力对于长途航行的船舶尤为重要,因为它可以减少燃料消耗和机械磨损,延长船舶的使用寿命。
在需要改变运动状态时,如转向、加速或减速,操纵性好的船舶能够迅速响应操船人员的指令,准确完成动作。
例如,在紧急情况下,船舶需要快速转向以避开障碍物或其他船只,良好的操纵性可以确保船舶能够在最短时间内完成转向,避免碰撞事故的发生。
航向稳定性和机动性操纵性包含两个相互制约的方面:航向稳定性和机动性。
航向稳定性是指船舶在受到外界干扰(如风、浪、流等)时,能够保持原有航向的能力。
这种能力对于在恶劣天气条件下航行的船舶尤为重要,因为它可以减少操舵次数和功率消耗,提高航行效率。
机动性则是指船舶改变航向的能力。
良好的机动性意味着船舶可以在狭窄水域或港口内灵活转向,避免与其他船只或障碍物发生碰撞。
为了在航向稳定性和机动性之间找到平衡点,船舶设计师通常会根据船舶的用途和航行环境来优化船体和舵的设计,以确保船舶在各种条件下都能保持良好的操纵性。
控制能力船舶的操纵性还体现在借助控制装置(如舵、车等)改变或保持船舶运动速率、姿态和方向的能力上。
操船人员通过操作这些控制装置,可以实现对船舶运动的精确控制。
良好的操纵性要求控制装置响应迅速、准确,且能够稳定地保持船舶在期望的运动状态。
例如,现代船舶通常配备先进的自动化控制系统,这些系统可以根据实时的航行数据自动调整舵角和主机转速,以保持船舶的稳定性和安全性。
船舶操纵性能测试技术及评价方法研究随着船运业的发展,对船舶操纵性能的要求也越来越高。
船舶操纵性能是指船舶在航行过程中的运动特性和控制能力。
操纵性能的好坏直接影响到船舶的安全性和经济效益。
因此,船舶操纵性能的测试和评价是船舶设计、建造和运营中不可或缺的环节。
一、船舶操纵性能的测试技术船舶操纵性能测试主要包括静态试验和动态试验两种方法。
静态试验是在船舶停泊状态下进行的试验,目的是测试船舶的稳定性和操纵性。
静态试验可以通过方向舵试验来检测船舶的方向稳定性、侧向稳定性和侧向操纵性能。
在方向舵试验中,通过模拟不同操纵条件下的水动力载荷,测试船舶的方向响应特性和舵效系数。
这种试验方法具有简单、易于操作、成本低等优点,但缺点是不能反映实际船舶的运动特性和操纵能力。
动态试验是在船舶航行状态下进行的试验,目的是测试船舶的运动特性和操纵能力。
动态试验可以采用模型试验和实船试验两种方法。
模型试验是通过制作船舶模型并在水池或风洞中进行试验来模拟船舶的运动特性和水动力性能。
模型试验具有试验条件可控、数据精确等优点,适用于初步设计阶段。
但是,由于模型的比例缩小,会存在失真现象,因此需要对实验数据进行缩放正确处理。
实船试验则是在实际船舶上进行试验。
实船试验具有真实性强、数据真实可靠等优势,适用于验证模型试验结果和进行航行试验。
实船试验可以通过船舶运动记录系统、GPS定位系统和遥测技术等手段对船舶的运动特性和操纵性能进行记录和分析。
二、船舶操纵性能的评价方法船舶操纵性能的评价涉及的指标比较复杂,常用的指标包括转向率、转向时间、转向燃油消耗量、船速损失等。
下面对常用的评价指标进行简单介绍。
1. 转向率:转向率是指船舶在定点转向时所达到的旋转角度与转向期间所行驶距离之比。
通常用度/秒来表示。
转向率越大,表示船舶的敏捷性越好。
2. 转向时间:转向时间是指船舶在定点转向时所需要的时间。
转向时间越短,表示船舶的控制能力越强。
3. 转向燃油消耗量:转向燃油消耗量是指船舶在完成一次转向时所消耗的燃油量。
第一章船舶操纵性能基本概念1.船舶操纵性能可分为固有操纵性和控制操纵性,固有操纵性:包括追随性、定长旋回性、航向稳定性;控制操纵性:包括改向性、旋回性、保向性。
2.转心:从瞬时轨迹曲率中心O 点作船舶首尾线的垂线可得瞬时转动中心P 点,简称“转心”。
船舶定常旋回时,一般转心位于船首之后约1/3 - 1/5 船长处;尾倾时,转心后移,首倾时,转心前移。
3.漂角:漂角是指船体上一点的船速矢量与船舶首尾线之间的交角;漂角一般指船舶重心处的漂角,用符号β 表示,左舷为负,右舷为负。
4.水动力及其力矩:水给予船舶的运动方向相反的力。
5.水动力作用中心:水动力作用中心是指船体水下部分的面积中心,随漂角β 的增大而逐渐向后移动。
船舶平吃水时,当漂角为0,船舶向前直航时,水动力中心在船首之后约1/4 船长处,且船速越低,越靠近船中;⏹当漂角为180º,即船舶后退时,水动力中心在距离船尾之前约1/4 船长处,且船退速越低,越靠近船中。
⏹船舶空载或压载时往往尾倾较大,船体水下侧面积中心分布在船中之后,水动力作用中心要比满载平吃水时明显后移。
6.引航卡(Pilot Card):船长与引航员之间关于船舶操纵性能进行信息沟通的资料卡;每航次由船长填写;内容包括本船的主尺度、操纵装置性能、船在不同载况时主机不同转速下的航速以及船舶特殊操纵装置(侧推器)等信息。
7.驾驶台操纵性图(Wheelhouse Poster):详细概述船舶旋回性能和停船性能的图表资料;置于驾驶台显著位置;内容包括深水和浅水(=1.2),满载和压载情况下船舶的旋回圈轨迹图及制动性能(停船试验)资料。
8.船舶操纵手册(Maneuvering Booklet):详细描述船舶实船操纵性试验结果的手册;它是重要的船舶资料之一;内容包括旋回试验、Z形操纵试验和停船试验的试验条件、试验记录以及试验分析等;操纵手册包括全部驾驶台操纵性图上的全部信息;除实船试验结果之外,操纵手册中的大部分操纵信息估算结果。
船舶操纵性与控制性能分析第一章船舶操纵性的定义与重要性船舶操纵性是指船舶在水上运动时对操纵指令的执行情况,包括转向性能、行进性能以及速度控制能力等。
船舶操纵性在航行安全和航行效率方面均具有重要意义。
良好的操纵性能使船舶能够准确地遵循船长的指令,并能够迅速应对紧急情况,确保船舶的稳定性和航行安全。
本章将对船舶操纵性的定义、指标和重要性进行分析。
第二章船舶操纵性指标船舶操纵性的指标主要包括转向半径、转向时间、航向稳定性和船舶速度控制性能。
转向半径是指船舶在接受操纵指令之后,从原来的航向转向到新航向所需的圆周半径。
转向时间是指从船舶接收操纵指令到其开始转向并最终稳定在新航向的时间。
航向稳定性是指船舶在无外部扰动的情况下能够稳定地维持航向的能力。
船舶速度控制性能是指船舶能够准确控制航行速度,在不同的航行条件下保持稳定。
第三章影响船舶操纵性的因素船舶操纵性受到多种因素的影响,包括船舶的设计参数、水动力因素、环境条件以及航行用途等。
船舶的设计参数如船体形状、船体尺寸、操纵装置的位置和类型等对船舶操纵性产生重要影响。
水动力因素包括航行速度、水流和风力等,在不同的水动力条件下,船舶的操纵性能会有所变化。
环境条件如水域深度、水温和水质等也可能对船舶操纵性产生影响。
此外,航行用途如货船、客船和军舰等也对船舶操纵性有所要求。
第四章船舶操纵性的改进方法为了提高船舶的操纵性能,设计师和船舶操纵员可以采取多种方法。
在设计方面,可以通过优化船体结构、改善操纵装置的设计和布置以及改进船舶的推进系统来提高船舶的操纵性。
在操纵操作方面,船舶操纵员可以通过合理的操作技术和训练来提高船舶的操纵性能。
此外,船舶的自动化技术和辅助操纵系统的引入也可以提高船舶的操纵能力。
第五章船舶操纵性的应用船舶操纵性在船舶的各个领域中都具有重要应用价值。
在商业航运中,良好的船舶操纵性能可以提高货船的航行效率,降低燃油消耗。
在客船运输中,船舶的操纵能力直接关系到乘客的舒适度和安全性。
第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈0.004 ————R0W·V02s ≈0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(——-——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 —————ℓn (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
计算停车冲程还可采用Topley船长提出的经验估算式S = 0.024 C·V0式中:C为船速减半时间常数,单位为min;V0为船舶停车时初速,单位为kn。
C值随船舶排水量不同而不同。
一般船舶在以常速航进中,从主机停车到降至余速2kn时,其停车冲程约为8~20L;而VLCC满载时,在以海上常速航进中停车至余速降至3kn,则停车冲程约为23L,冲时近30min。
当然,正常的进出港或接近泊地仍以逐级降速为妥,以利于主机的养护。
三、倒车制动性能船舶在全速前进中开后退三,从发令开始至船舶对水停止移动所需的时间和航进的路程,以及相应的偏航量和偏航角,统称为倒车制动性能。
倒车冲程又称为紧急停船距离(crash stopping distance)或最短停船距离(shortest stopping distance)。
全速前进的船舶在进行紧急制动时,为不致造成主机转动部件出现应力过大的情况,在关闭主机油门后,通常要等航速降至全速的60%~70%,转速降至额定转速的25%~35%时,方可将压缩空气持续充入汽缸使主机停转,然后进行反向起动。
1.紧急停车距离(C、S、D)和停船时间的估算1)Lovett式估算法W·V0t ≈0.00089 —————R0W·V02s ≈0.0121 —————R0式中:s——最短停船距离(m);t——所需时间(min);W——船舶实际排水量(t);R0——船速为V0时的船舶阻力(t);V0——倒车前的船舶速度(kn)。
2)紧急停船距离经验估算法从主机倒车后的船速随时间变化关系看,可近似认为是一个匀减速过程,如图1--14所示。
紧急停船距离的大小就是速度曲线与时间轴围成的面积。
即tsS = ∫ vdt = CV k·t s式中:V k——倒车时船速(kn);t s——倒车使用时间(s);C——紧急停船距离系数,一般货船取0.25~0.27,大型油轮取0.27~0.29;S——紧急停船距离(m)。
大型油轮如时间按分(min)计算,也可按下式求取紧急停船距离S = 16 V k·t m使用上述两公式时,可不考虑船舶主机种类和吃水状态。
图1--143)低速航进时倒车冲程及冲时的估算1 w k xS = ———————— V022 g T pw k xt s = —————— V0g T p式中:S——倒车冲程(m);t s——所需时间(s);g——重力加速度(9.8m/s2);W——船舶排水量(t);k x——船舶前进方向虚质量系数,可经实验取得,象VLCC或肥大型船舶可取1.07。
T p——螺旋桨倒车拉力(t),估算时可用T p =0.01N拉(后退倒车功率)来估算;V0——船舶倒车时船速(m/s)。
当船舶驶向泊地并要求船舶能在一倍船长的距离内用倒车把船停住,则船舶所用余速为2g·L·T PV0 =————————W·k X4)经验数据根据统计,一般情况下各类船舶的紧急停船距离大致为(如表1-5所示):载重量船种主机种类紧急停船距离1万t 普通货船内燃机 6 ~ 8 L1万t 高速货船集装箱船滚装船内燃机7 ~ 8 L5万t 油轮内燃机8 ~ 11 L5万t 货船内燃机8 ~ 10 L10万t 油轮汽轮机10 ~ 13 L15~20万t 油轮汽轮机13 ~ 16 L2.船舶停船性能船舶的停船性能是指在标准状态下以海上船速行驶的船舶,经自力制动操纵后,可在允许偏航范围内(偏航量和偏航角)迅速停船的性能。
由于沉深横向力和排出流横向力的作用,倒车制动时,船舶在减速的同时船首将发生剧烈的偏转运动,其运动轨迹是一条曲线,如图1—15所示。
图1—15在图中曲线的长度即最短停船距离,也称之为制动行程R T(track reach)。
船舶重心沿原航向方向移动的距离称为制动纵距R H(head reach),它是用车紧急停船能让开前方物标的最短距离。
倒车制动时,船首向偏离原航向的角度,称为偏航角。
而船舶重心偏离原航向的横向距离,称为偏航量D L。
压载时,停船距离短,偏航角和偏航量较小;满载时,停船时间长,偏航角和偏航量大,有时竟高达200°左右。
具有良好停船性能的船舶应满足,在开阔水域具有相应其船长的最小停船距离,而在水深、航道宽度受限制的水域不仅要具有最小停船距离,而且要具有较小的偏航量和偏航角。
3.影响紧急停船距离的主要因素1)主机倒车功率、换向时间主机倒车功率越小,紧急停船距离越大。
此外,单位排水量功率(MCR/DWT)越小,紧急停船距离越大,这就是大型船倒车功率较小型船舶大,但紧急停船距离一般较大的原因所在。
主机换向时间越短,紧急停船距离越小。
主机换向时间因主机类型不同而不同,一般从前进三到后退三换向所需时间蒸汽机船约需60~90s;内燃机船约需90~120s;汽轮机船约需120~180s。
另外,内燃机倒车功率占常用功率的比例也较气轮机为高。
2)推进器种类与定距桨相比,调距桨只需改变桨叶方向便可达到换向目的。
操作时间短,在调整螺距的同时即可产生较大乃至最大的倒车拉力,故紧急停船距离较短。
若其他条件相同,一般CPP船的紧急停船距离约为FPP船的60%~80%。
3)排水量和船型在船速和倒车拉力相同时,排水量越大,紧急停船距离越长。
通常压载时的停船冲程约为满载时的80%,而倒车冲程约为满载时的40%~50%左右。
此外,C b大的肥大型船舶的附加质量大,故其停船距离较瘦型船舶为长。
4)船速若其他条件相同,船速越大,冲程越大。
5)外界条件顺风流时冲程增大;反之则减小。
浅水中船舶阻力增加,冲程略有减小。
6)船体污底船体污底严重,则阻力增加,船舶紧急停船距离将相应减小。
4.各种制动方法及其运用1)倒车制动法通过螺旋桨倒转或改变螺距,使之产生强大拉力进行制动的方法称为倒车制动。
该法因其制动拉力大,操纵方便而被各类船舶广泛采用。
但因存在控向困难,不利于船舶保位的缺陷,因而大型船舶在港内应谨慎使用。
2)蛇航制动法(Zig zag stop manoeuvre)这是英国造船研究协会(BSRA)提出的紧急停船制动方法。
该法通过船舶自身操舵、换车,不仅可利用主机倒车拉力、船舶斜航阻力和舵阻力使船舶快速停住,而且能保证船舶偏航方向明确、较少的偏航距离。
此外,由于采用分阶段逐级平稳降速,避免了主机超负荷工作等情况的出现。
该法适用较开阔水域,对于大型船舶、方型系数C b较大的船舶,深水域中初速度较高时尤为有效。
其缺点是在较窄水域或航道内不宜使用,操纵较复杂。
3)满舵旋回制动法船舶满舵旋回一周,当航向复原时,可使船速减为原来速度的70%左右,大型油轮甚至降至原船速的50%左右。
该法操作简便,无需机舱动车,大型船舶抵港前常用此法减速。
4)拖锚制动法该法仅适用于万吨及万吨以下船舶,而且抛锚时的船舶对地速度仅限于2~3kn以下。
大型船舶由于其锚机的刹车力不足,拖锚制动将会损坏锚设备或使制动失败,故不宜采用此法。
5)拖轮制动法当本船船速低于6~7kn时,根据当时的吃水情况使用相应数量的拖轮,利用拖轮的推力作用,有效地控制本船航速。
该法多用于大型船舶在港内航道中的制动。
6)辅助装置制动法该法是通过在船体上增设一些辅助装置,在需要时予以启动,以增加船舶运动阻力,消耗船舶动能,使船舶尽快减速。
该法在船速较高时制动效果明显。
5.停船冲程的测定1)测定条件测定应选择在无风、流影响的水域进行,水深一般应不小于3√Bd (B为船宽,d为吃水),船舶保持正舵。
2)测定内容通常是在空船和满载时,分别测定主机处于主机转速为前进一、前进二、前进三时使用停车和倒车的冲程和所需时间,至少应测定船舶前进三至停车,前进二至停车的停车冲程和前进三至后退三及前进二至后退三的倒车冲程。
3)测定方法①抛板法采用此方法比较简便且实用,停船距离可由下式求得:停船距离=(n - 1)L + 最后一块木板移动的距离式中:n为抛出木板总数;L为首尾观测组的距离(m)。
②定位法多采用无线电定位法和GPS定位法,通过连续测定船位求得冲程。
大型船舶多用此法。
第二节船舶旋回性能在船舶操纵中,就舵的使用而言,大致可分为小舵角的保向操纵、一般舵角的转向操纵及大舵角的旋回操纵三种,船舶旋回性是船舶操纵中极为重要的一种性能。
一、船舶旋回运动的过程船舶以一定航速直线航行中,操某一舵角并保持之,船舶将作旋回运动。