弹塑性力学-03应力应变关系
- 格式:ppt
- 大小:1.23 MB
- 文档页数:60
我所认识的应力应变关系一 在前面两章的分别学习了关于应力与应变的学习,第三章的本构关系讲述了应力与应变的关系从而构成了弹塑性力学的本构关系。
在单向应力状态下,理想的弹塑性材料的应力应变关系及其简单满足胡克定律即εσX XE =在三维应力状态下需要9个分量,即应力应变需要9个分量,于是可以把单向应力应变关系推广到三维应力状态,及推广到广义的胡克定律本式应该是91个应变分量 单由于切应力互等定理,此时后面的三个应力与式中的切应力想等即现在剩余36个应变分量。
(1)具有一个弹性对称面的线弹性体的应力应变公式如下(2)正交各向异性弹性体的弹塑性体公式如下(3)各向同性弹性体的本构方程各向同性弹性体在弹性状态下,主应力方向与主应变方向重合容易证明。
在主应变空间里,由于应变主轴与应力主轴重合,各向同性弹性体体内任意一点的应力和应变之间满足:111213x x y zC C C σεεε=++ 212223y x y z C C C σεεε=++313233z x y zC C C σεεε=++ (2-3)x ε对x σ的影响与y ε对y σ以及z ε对z σ的影响是相同的,即有112233==C C C ;y ε和z ε对x σ的影响相同,即1213=C C ,同理有2123=C C 和3132=C C 等 ,则可统一写为:112233==C C C a =122113312332=====C C C C C C b = (2-4)所以在主应变空间里,各向同性弹性体独立的弹性常数只有2个。
在任意的坐标系中,同样可以证明弹性体独立的弹性参数只有2个。
广义胡可定律如下式1[()]1[()]1[()]x x y z y y x z z z x y E E E εσνσσεσνσσεσνσσ⎧=-+⎪⎪⎪=-+⎨⎪⎪=-+⎪⎩ 222xy xy yz yz zx zx G G G τγτγτγ⎧=⎪⎪⎪=⎨⎪⎪=⎪⎩v 泊松比 2(1)EG ν=+剪切模量 E :弹性模量/杨氏模量 虎克定律E G σετγ==对于应变能函数理解有点浅在此就不多做介绍了。
我所认识的应力与应变的关系机械与动力工程学院我所认识的本构关系可以从三个不同的受力条件下进行分析,第一是在弹性变形下的应力与应变的关系,第二是在屈服条件下的应力与应变的关系,第三是在塑性条件下的应力与应变的关系,而对应力与应变的关系的研究也可以归结为对本构关系的研究。
首先,弹塑性力学分别从静力学和几何学的角度出发,导出了平衡方程的和几何方程,这些方程均与物体的材料性质(物理性质)无关,因而适用于任何连续介质。
但仅仅依靠平衡方程和几何方程来解决实际中的工程问题是不够的。
由于平衡方程仅建立了力学参数(应力分量与外力分量)之间的联系,而几何方程也仅建立了运动学参数(位移分量与应变分量)之间的关系,所以平衡方程与几何方程式两类完全相互独立的方程,他们之间还缺乏必要的联系。
对于所求解的问题来讲,因为您未知量的数目多于任何一类方程的个数,所以无法利用这两类方程求的全部未知量。
平衡方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂222222000t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (1) 几何方程:⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u z w z v y w y v y u x v x u zx z yz y xy x γεγεγε (2) 为了求解具体的力学问题,还必须引进一些关系式,这些关系式即所谓的本构关系。
本构关系反映可变形体材料的固有特此那个,故也称为物理关系,它实际上是一组联系力学参数和运动学参数的方程式,即所谓的本构方程。
本构方程实际上就是一组反映可变形体材料应力和应变之间关系的方程。
在单向应力状态下,理想弹性材料的应力和应变之间的关系极其简单。
我所认识的应力和应变关系在这之前我认识了应力和应变的概念、性质以及从静力学和几何学的角度出发所得到的平衡方程和几何方程。
但是平衡方程仅反映了应力分量和外力分量的关系;几何方程仅建立了位移分量和应变分量的关系。
而谈到应力与应变的关系,对于可变形固体,在弹塑性力学中,在外力的作用下,其将发生变形。
变形分为两个阶段,弹性阶段和塑性阶段。
在弹性阶段,发生的弹性变形可以完全恢复,它是一个可逆过程。
此时,应力与应变的关系是一一对应的,是单值函数关系。
而在塑性阶段,所发生的塑性变形是不可以恢复的,是不可逆过程。
相对应的,塑性阶段的应力应变的关系是非线性关系,不存在一一对应的关系。
我所认识的应力和应变的关系就是本构关系。
本构关系也称为物理关系,它反应的是可变形材料的固有属性,实质上是一组联系力学参数和运动参数的方程式,也就是我们所说的本构方程。
在说应力与应变的关系之前,先说一下本构关系的相关影响因素,包括材料、环境、加载类型、以及加载速度。
即,),,(T t f εσ=。
另外,有各种各样的本构系,比如:弹性本构关系、塑性本构关系、粘弹性本构关系、粘塑性本构关系、各向同性本构关系、各向同性本构关系等等。
简单情况的本构关系:应力和应变的关系包括弹性和塑性的应力应变关系。
我们所说的是线性弹性体的应力应变关系,又分为简单应力状态和复杂应力状态。
在简单拉伸情况下,理想弹性材料的应力和应变的关系很简单,就是材料力学中的胡克定律: 。
而在塑性阶段,应力应变之间不再是简单的胡克定律,而是 。
另外,简单拉伸情况下的卸载定律是 。
在后继弹性阶段,也就是卸载后重新加载的材料会继续发生新的塑性变形,在此时的屈服称为后继屈服,相应的屈服点称为后继屈服点。
初始屈服和后继屈服的不同是:第一,应力的数值不一样,后继屈服的应力值更大;第二,屈服点的个数不一样。
初始屈服点只有一个,而后继屈服点会有好多个,则其对应的应力值也会有很多个。
最后,在卸载全部载荷后进行反向加载比如说把拉伸改成压缩,此时会产生Bauschinger 效应。
弹性力学弹性体的应力与应变关系弹性力学是一门研究固体材料在外力作用下的变形和应力分布规律的学科。
其中,弹性体是一类能够在外力作用下发生形变,但恢复力可以将其恢复到原始状态的物质。
弹性体的应力与应变关系是弹性力学中的基本概念和重要理论。
一、什么是应力与应变在力学中,应力是物体受来自外界作用的力引起的单位面积内的力的大小。
它是描述物体受力情况的物理量。
应力可分为正应力和剪应力两种,正应力作用于物体的表面上的垂直方向,而剪应力则作用于物体的表面上的切向方向。
应变是描述材料形变程度的物理量,是物体在受力下发生变形时单位长度的变化。
应变也可分为正应变和剪应变两种,正应变是物体长度在受力作用下产生的相对变化量,而剪应变则是物体形状的变化量与原始尺寸之比。
二、背景知识弹性体的应力与应变关系可以通过背景知识来理解。
弹性体的主要特性是能够在外力的作用下发生形变,但当外力消失时,它能够恢复到原来的形状和尺寸。
这是因为弹性体的分子或原子之间存在着弹性力,当外力作用结束时,弹性力将趋于平衡,使得物体恢复到原来的状态。
三、胡克定律胡克定律是描述弹性体应力与应变关系的基本定律。
根据胡克定律,当外力作用于弹性体时,弹性体内部的应力与应变成正比。
具体数学描述如下:σ = Eε其中,σ代表应力,单位为帕斯卡(Pa),E代表弹性模量,单位为帕斯卡(Pa),ε代表应变,为无单位。
胡克定律适用于弹性体在线性弹性范围内,即应力与应变成正比,并且比例系数恒定。
此时的应力-应变关系为线性关系,称为胡克定律。
超出线性弹性范围后,材料会发生塑性变形。
四、弹性模量弹性模量是表征弹性体抵抗形变的能力大小的物理量。
它是胡克定律中比例系数的倒数,可以用来度量弹性体的刚度。
常见的弹性模量有:1. 杨氏模量(Young's Modulus):用E表示,描述的是物体在拉伸或压缩时的应变与应力之间的关系。
2. 剪切模量(Shear Modulus):用G表示,描述的是物体在受剪时的应变与应力之间的关系。
我所认识的应力和应变之间的关系在单向应力状态下,理想弹性材料的应力和应变之间的关系是满足胡克定律的一一对应的关系。
在三维应力状态下描述一点处的应力状态需要9个分量,相应的应变状态也要用9个应变分量来表示。
对于一个具体的理想弹性体来讲,如果在三维应力状态下,应力与应变之间仍然有线性一一对应关系存在,则称这类弹性体为线性弹性体。
所谓各向弹性体,从力学意义上讲,就是弹性体内的每一点沿各个方向的力学性质都完全相同的。
这类线性弹性体独立的唐兴常数只有两个。
各向同性体本构关系特点:1.主应力与主应变方向重合。
2.体积应力与体积应变成比例。
3.应力强度与应变强度成比例。
4.应力偏量与应变偏量成比例。
工程应用中,常把各向同性弹性体的本构方程写下成11()11()11()x y z xy xy y x z yz yz z y x xz xz E G E G E G εσμσσγτεσμσσγτεσμσσγτ⎧⎡⎤=-+=⎣⎦⎪⎪⎪⎡⎤=-+=⎨⎣⎦⎪⎪⎡⎤=-+=⎪⎣⎦⎩,式中分别为弹性模量、泊松比和剪切模量。
在E G μ、、这三个参数之间,实际上独立的常量只有两个,它们之间存在关系为()21E G μ=+。
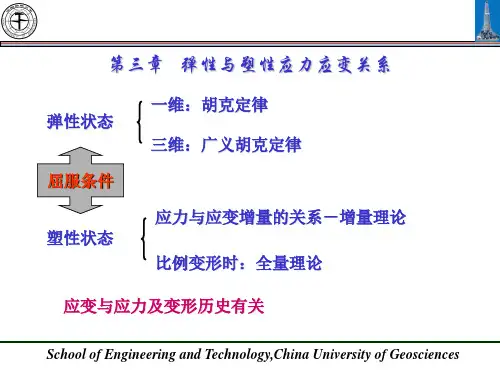
屈服条件:弹性和塑性的最主要区别在于变形是可以恢复。
习惯上,根据破坏时变形的大小把工程材料分为脆性材料和塑性材料两类。
对于加载过程如图1OA: 比例阶段;线性弹性阶段AB: 非弹性变形阶段 BC : 初始屈服阶段 s σσ≤ CDE :强化阶段;应变强化硬化阶段EF : 颈缩阶段;应变弱化,软化阶段s σσ≥ C 点为初始屈服点具有唯一性。
在应力超过屈服应力后,如果在曲线上任意一点D 处卸载,应力和应变之间将不再遵循原有的加载曲线规律,而是沿一条接近平行于OA 的直线DO ’变化,直到应力下降为零,这时应变并不为零,即有塑性应变产生。
如果用OD ’表示总应变ε,O ’D ’表示可以恢复的弹性应变eε,OO ’表示不能恢复的塑性应变p ε,则有e p εεε=+,即总应变等于弹性应变加上塑性应变。
弹塑性⼒学定理和公式应⼒应变关系弹性模量||⼴义虎克定律1.弹性模量对于应⼒分量与应变分量成线性关系的各向同性弹性体,常⽤的弹性常数包括:a弹性模量单向拉伸或压缩时正应⼒与线应变之⽐,即b切变模量切应⼒与相应的切应变之⽐,即c体积弹性模量三向平均应⼒与体积应变θ(=εx+εy+εz)之⽐,即d泊松⽐单向正应⼒引起的横向线应变ε1的绝对值与轴向线应变ε的绝对值之⽐,即此外还有拉梅常数λ。
对于各向同性材料,这五个常数中只有两个是独⽴的。
常⽤弹性常数之间的关系见表3-1 弹性常数间的关系。
室温下弹性常数的典型值见表3-2 弹性常数的典型值。
2.⼴义虎克定律线弹性材料在复杂应⼒状态下的应⼒应变关系称为⼴义虎克定律。
它是由实验确定,通常称为物性⽅程,反映弹性体变形的物理本质。
A各向同性材料的⼴义虎克定律表达式(见表3-3 ⼴义胡克定律表达式)对于圆柱坐标和球坐标,表中三向应⼒公式中的x 、y、z分别⽤r、θ、z和r、θ、φ代替。
对于平⾯极坐标,表中平⾯应⼒和平⾯应变公式中的x、y、z⽤r、θ、z代替。
B⽤偏量形式和体积弹性定律表⽰的⼴义虎克定律应⼒和应变量分解为球量和偏量两部分时,虎克定律可写成更简单的形式,即体积弹性定律应⼒偏量与应变偏量关系式在直⾓坐标中,i,j=x,y,z;在圆柱坐标中,i,j=r,θ,z,在球坐标中i,j=r,θ,φ。
弹性⼒学基本⽅程及其解法弹性⼒学基本⽅程|| 边界条件|| 按位移求解的弹性⼒学基本⽅法|| 按应⼒求解的弹性⼒学基本⽅程|| 平⾯问题的基本⽅程|| 基本⽅程的解法|| ⼆维和三维问题常⽤的应⼒、位移公式1.弹性⼒学基本⽅程在弹性⼒学⼀般问题中,需要确定15个未知量,即6个应⼒分量,6个应变分量和3个位移分量。
这15个未知量可由15个线性⽅程确定,即(1)3个平衡⽅程[式(2-1-22)],或⽤脚标形式简写为(2)6个变形⼏何⽅程[式(2-1-29)],或简写为(3)6个物性⽅程[式(3-5)或式(3-6)],简写为或2.边界条件弹性⼒学⼀般问题的解,在物体部满⾜上述线性⽅程组,在边界上必须满⾜给定的边界条件。