动态矩阵
- 格式:doc
- 大小:298.50 KB
- 文档页数:6
动态矩阵算法在水箱液位控制中的应用引言:在工业生产和日常生活中,对于水箱液位控制的控制精度和稳定性要求越来越高。
水箱液位的控制算法起着至关重要的作用。
动态矩阵控制(Dynamic Matrix Control,DMC)算法是一种常用于过程控制的先进控制方法。
本文将探讨动态矩阵算法在水箱液位控制中的应用,包括算法原理、控制系统建模、控制器设计和实验验证等方面。
一、算法原理动态矩阵控制算法是一种模型预测控制(Model Predictive Control,MPC)方法,它基于离散时间多步骤预测模型。
其核心思想是通过对系统动态行为进行建模和预测,计算出最优控制方案,并根据实际反馈信息进行修正,以实现对系统的良好控制效果。
动态矩阵控制算法的基本步骤如下:1.系统建模:根据水箱液位控制过程的特点,建立系统的动态模型。
通常使用一阶惯性模型或一阶延迟模型来描述水箱液位的动态响应。
2.输入输出数据采集:通过传感器采集水箱液位和控制输入的数据,并对其进行离散化处理,使其适用于动态矩阵控制算法。
3.控制器设计:根据系统模型和控制目标,设计最优控制律。
动态矩阵算法主要包括预测模型、目标函数、约束条件等。
4.控制信号计算:基于当前的状态和控制输入的历史记录,使用动态矩阵算法计算出最优的控制信号。
5.控制执行:将计算得到的控制信号应用于实际控制系统中,调节水箱液位,并实时监控液位变化。
6.实时修正:根据实际反馈信息,对控制器中的参数进行修正,以提高控制效果和稳定性。
以上过程循环迭代,以不断调整控制信号,最终实现对水箱液位的精确控制。
二、控制系统建模在水箱液位控制中,我们需要对系统进行建模,以便进行后续的控制器设计和仿真。
通常采用一阶惯性模型或一阶延迟模型来描述水箱液位的动态响应。
一阶惯性模型:首先,假设水箱的液位变化满足一阶惯性动态方程:T * dH(t)/dt = k * (u(t) - H(t))其中,H(t)表示液位,u(t)表示输入控制信号,k表示液位变化的比例系数,T表示液位响应的时间常数。
动态矩阵在网络延迟补偿中的研究摘要:在解决网络控制系统延迟问题时还要考虑在信号突变的情况下,会产生较大的延迟现象,从而使整个控制系统不稳定,网络控制系统的性能也会下降。
而解决网络延迟的模型算法要考虑到这种突发的现象,所以本文研究引入动态矩阵补偿算法,对网络延迟进行条件补偿,从而解决网络控制系统中的网络延迟问题。
关键词:补偿;动态矩阵中图分类号:tp393.08动态矩阵控制算法dmc(dynamic matrix control)是一种具有约束、多变量优化的控制算法,一般是基于阶跃响应模型,该算法模型的特点是算法简单、计算量较小、鲁棒性较强等特点,对于网络控制系统的开环渐进稳定和响应滞后等特性都有较好的处理方式,非常适用于解决网络控制系统中存在的网络延迟的问题。
dmc在解决网络控制系统中网络延迟问题时,采用的模型思想是:首先,对延迟模型进行预测。
其次,根据修正值进行校正反馈。
最后,根据修正结果进行滚动优化。
在模型的输入端采集到的样本信号是被控对象的阶跃离散信号,对样本信号进行动态优化,在输出端采集到的是整个dmc优化响应后的预测模型输出序列,具体输出序列如公式(1)所示。
ym(k+1)=y0(k+1)+a△u(k)(1)应满足条件(2):(2)由于整个模型的计算误差和系统性能干扰等影响,输出值需要进行校正反馈验证,验证后实现闭环预测。
经过反馈校正后,输出端输出结果如公式(3)所示:yp(k+1)=ym(k+1)+a0(y(k)-ym(k))(3)可以根据实际情况进行适当的优化取值。
采用dmc模型进行优化,采用的是滚动优化的方式,其优化结果用向量表示为公式(4):j=||yr(k+1)-yp(k+1)||q2+||△u(k)||r2 (4)进行化简得公式(5):△u(k)=(atqa+r)-1atq[yr(k+1)-yp(k+1)] (5)公式(5)中的△u(k)就是在k时刻,经过dmc模型优化后的最优延迟补偿增量。
状态空间动态矩阵控制matlab
状态空间模型是一种描述系统动态行为的数学模型,它通过将系统的状态、输入和输出表示为向量形式来描述系统的动态变化。
状态空间模型可以用动态矩阵控制来实现系统的控制。
在MATLAB中,可以使用控制系统工具箱中的函数和命令来进行状态空间模型的建模和控制设计。
以下是一些常用的函数和命令:
1. `ss`函数:用于创建状态空间模型。
可以通过指定系统的状态方程、输出方程和输入方程来创建状态空间模型对象。
2. `tf`函数:用于将传递函数模型转换为状态空间模型。
可以通过指定传递函数的分子和分母多项式来创建状态空间模型。
3. `ss2tf`函数:用于将状态空间模型转换为传递函数模型。
可以通过指定状态空间模型的动态矩阵来创建传递函数模型。
4. `ssdata`函数:用于提取状态空间模型的动态矩阵。
可以通过该函数获取系统的状态方程、输出方程和输入方程的动态矩阵。
5. 控制系统工具箱中的控制设计函数:MATLAB提供了许多控制器设计函数,如`lqr`(线性二次调节器)、`pid`(比例积分微分控制器)等,这些函数可以用于设计状态空间模型的
控制器。
通过使用以上函数和命令,可以在MATLAB中进行状态空间模型的建模、控制和仿真等操作。
link appraisement杨 峰 张大鹏 王凯民 龙俊峰 峰 戴 祎内蒙古大唐国际托克托发电有限责任公司杨峰(1989—)毕业于内蒙古大学自动化系,硕士学位,工程师,高级技师,现工作于内蒙古大唐国际托克托发电有限责任公司,热控车间技术员。
3)选取P 后,取0,/1i i Tq τ< =。
4) 整定M,对于单调特性的对象,取M=23 ;对于有振荡特性的对象,取M=48 。
5)选择j r =0。
6)参数选取之后,开始进行仿真实验,若果这时控制曲线表现得比较好,那么进行下一步,表现得不好,则重新选择M 和P,整定顺序依然按照上面论述的顺序。
7)在选取好P 值之后,进行仿真实验,这时需要重点关注控制增量的变化是否平稳,若不符合,适当的增大j r 的值。
8)最后一步整定校正矩阵C,C 的整定在仿真实验中要人为地设置干扰或进行模型失配试验才能整定。
不同的工业控制对象实际上有不同的控制要求,所以在此我们只进行小部分的设计与仿真。
选取的采样周期为Ts=2,N=40,P=30,M=20,Q=1*eye(P),R=2*eye(M),delta_umin=-5,delta_umax=5,umax=10,得到的控制曲线如下:图1 大时滞系统仿真试验图4 Q 变化控制曲线图图2 M 变化控制曲线图图3 P 变化控制曲线图数据被模块接收到,AUX输出低电平,当所有数据都被放入进RF芯片后,AUX为高电平输出。
现模式 0所发出的数据包,只能让模式 1、模式的接收模块所接收到。
接收模块:收到数据包后,低电平由AUX 输出,串口输出所有无线数据后,高电平由输出 。
已解决的关键问题(1)信号采集:主要包括甲醛、可吸入颗粒等的检测,其测量精度对系统控制有重要作用。
(2)数据分析:中央处理器对传感器送来的信号进行分析,发出相应的处理信号给执行机构。
(3)无线通信:采用通信模块将中央处理器发出的信号,发送给监控中心。
(4)执行机构:风机、紫外灯处理可对空气污染物进行及时处理图8 总体程序流程图液晶显示程序流程图传感器程序流程图图11 传输串口流程图。

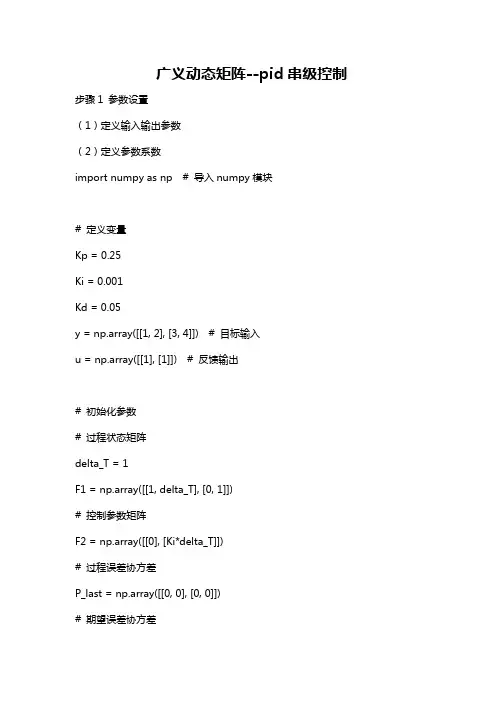
广义动态矩阵--pid串级控制步骤1 参数设置(1)定义输入输出参数(2)定义参数系数import numpy as np # 导入numpy模块# 定义变量Kp = 0.25Ki = 0.001Kd = 0.05y = np.array([[1, 2], [3, 4]]) # 目标输入u = np.array([[1], [1]]) # 反馈输出# 初始化参数# 过程状态矩阵delta_T = 1F1 = np.array([[1, delta_T], [0, 1]])# 控制参数矩阵F2 = np.array([[0], [Ki*delta_T]])# 过程误差协方差P_last = np.array([[0, 0], [0, 0]])# 期望误差协方差Q = np.array([[1, 0], [0, 1]])# 测量误差协方差R = np.array([[2]])步骤2 预测# 预测目标输出y_hat = np.dot(F1, u)# 计算下一步期望状态协方差P = np.dot(F1, P_last) + np.dot(P_last, F1.T) + Q步骤3 更新# 计算残差res = y - y_hat# 计算观测残差协方差Pxy = np.dot(P, np.ones((2, 1)))# 更新得到卡尔曼增益K = np.dot(Pxy, np.linalg.inv(np.dot(np.ones([1, 2]), Pxy) + R))# 更新反馈控制量u = u + np.dot(K, res)# 更新状态参数矩阵P = P - np.dot(K, Pxy.T)# 计算增益参数Kp_value = K[0][0]*KdKi_value = K[1][0]*KiKd_value = K[0][0]*Kp# 打印结果print("计算出来的Kp值为:%.2fKi值为:%.2fKd值为:%.2f" % (Kp_value, Ki_value, Kd_value))print("更新后的反馈控制量为:", u)print("更新后的协方差为:", P)#计算出来的Kp值为:0.04Ki值为:0.00Kd值为:2.50#更新后的反馈控制量为:[[1.01869]# [1.002 ]]#更新后的协方差为:[[ 0.33798036 -0.42966258]# [-0.42966258 0.56371985]]。
动态矩阵控制算法
动态矩阵控制算法是一种用于控制系统的先进控制算法,它采用了矩阵的表示和演化方法。
其主要思想是将系统的状态和控制输入表示为矩阵,通过矩阵运算和演化来实现对系统的控制。
动态矩阵控制算法的核心思想是通过不断更新和演化控制矩阵来适应系统的变化。
它根据系统的反馈信息和目标要求,利用矩阵运算和优化算法来计算出最优的控制矩阵。
然后将该控制矩阵应用于系统中,以实现对系统的控制。
动态矩阵控制算法具有以下特点:
1. 矩阵表示:将系统的状态和控制输入表示为矩阵,方便进行矩阵运算和演化。
2. 自适应性:通过不断更新和演化控制矩阵,能够适应系统的变化和环境的变化。
3. 优化算法:利用优化算法来求解最优的控制矩阵,以满足系统的要求。
4. 实时性:动态矩阵控制算法能够在实时性要求较高的控制系统中应用,实现对系统的准确控制。
除了以上特点,动态矩阵控制算法还可以根据具体的系统和应用场景进行扩展和改进。
它在工业自动化、机器人控制、智能交通等领域具有广泛的应用前景。
基于单位阶跃响应的动态矩阵控制方法下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!基于单位阶跃响应的动态矩阵控制方法1. 引言在控制工程领域,动态矩阵控制方法是一种重要的控制策略,它通过分析系统的单位阶跃响应来设计控制器,以达到优化系统响应的目的。
多元动态矩阵控制多元动态矩阵控制是一种现代控制理论中的重要方法。
它主要通过对系统中多个变量之间的相互作用进行建模,从而实现对系统的控制。
该方法常用于工业自动控制、航空航天以及机器人等领域。
多元动态矩阵控制的基本思想是将系统中多个变量之间的相互作用用一个矩阵来描述,并将系统的控制目标表示成一个矢量。
通过将矩阵与矢量相乘,得到一个控制信号,从而实现对系统的控制。
多元动态矩阵控制的优点在于可以有效地处理多个变量之间的相互作用,并且可以在不同时间段内对系统进行控制。
此外,该方法可以很好地适应不同类型的系统,因此应用范围非常广泛。
在工业自动控制中,多元动态矩阵控制常用于控制复杂的生产过程。
例如,在一条生产线上,需要对多个参数进行控制,如温度、湿度、物料流动速度等。
这些变量之间存在相互作用,如果使用传统的单变量控制方法来控制,将很难实现对整个生产过程的有效控制。
因此,多元动态矩阵控制在这种情况下显得尤为重要。
在航空航天领域,多元动态矩阵控制常用于控制飞行器的姿态和运动。
例如,在一架飞机上,需要对多个因素进行控制,如飞机的姿态、速度、高度等。
这些因素之间存在相互作用,如果使用传统的单变量控制方法来控制,将难以实现对整个飞行过程的有效控制。
因此,多元动态矩阵控制在这种情况下也显得尤为重要。
在机器人领域,多元动态矩阵控制常用于控制机器人的运动和姿态。
例如,在一台机器人上,需要对多个参数进行控制,如机器人的位置、速度、方向等。
这些参数之间存在相互作用,如果使用传统的单变量控制方法来控制,将难以实现对整个机器人运动过程的有效控制。
因此,多元动态矩阵控制在这种情况下也显得尤为重要。
多元动态矩阵控制是一种非常重要的现代控制理论方法。
它可以有效地处理多个变量之间的相互作用,并且可以在不同时间段内对系统进行控制。
因此,在工业自动控制、航空航天以及机器人等领域中,多元动态矩阵控制都有着广泛的应用前景。
eigen动态矩阵参数Eigen动态矩阵:高效处理线性代数运算的利器随着科技的快速发展,线性代数在各个领域的应用越来越广泛。
而在处理线性代数运算时,矩阵是一种非常常见且重要的数据结构。
为了高效地处理矩阵运算,我们需要一个高性能的库来帮助我们完成这些任务。
Eigen动态矩阵,作为一个开源的C++模板库,正是为了解决这个问题而诞生的。
Eigen动态矩阵是一个功能强大且易于使用的库,它提供了各种各样的矩阵和向量运算。
无论是简单的加减乘除,还是更复杂的特征值计算和矩阵分解,Eigen都可以轻松应对。
而且,Eigen还支持矩阵的动态大小,这意味着我们可以根据需要创建任意大小的矩阵,而不需要提前确定其大小。
使用Eigen动态矩阵非常简单,我们只需要包含相应的头文件,并进行简单的配置即可开始使用。
首先,我们需要定义一个矩阵对象,可以是动态大小的,也可以是固定大小的。
然后,我们可以通过简单的赋值操作来填充矩阵,或者使用各种各样的运算符来进行矩阵运算。
最后,我们可以使用矩阵对象的成员函数来获取矩阵的属性,比如行数、列数,或者进行各种各样的运算。
除了基本的矩阵运算,Eigen还提供了一些高级功能,比如矩阵分解和特征值计算。
矩阵分解可以将一个矩阵分解为若干个简单的矩阵的乘积,从而简化复杂的运算。
特征值计算可以找到一个矩阵的特征值和特征向量,这对于解决一些特定的问题非常有用。
而Eigen提供的这些功能都是高效的,可以在很短的时间内完成计算。
在实际的应用中,Eigen动态矩阵可以广泛应用于各个领域。
比如,在机器学习和数据分析中,矩阵运算是非常常见的,而Eigen的高性能可以大大提高计算效率。
在物理学和工程学中,矩阵运算用于描述和求解各种物理现象,而Eigen的易用性可以使研究人员更加专注于问题本身,而不是底层实现。
在计算机图形学中,矩阵运算用于描述和变换三维空间中的图形对象,而Eigen的高性能可以保证实时渲染的效果。
Eigen动态矩阵是一个高效处理线性代数运算的利器。
动态矩阵控制MATLAB代码1 %预测控制书上的P79例5-1得到的输出曲线趋近于⽆穷不对不知错误在哪⾥ pid控制器也是趋近于⽆穷⼤2 %不明⽩采样周期Ts怎么⽤,什么意思3 %将阶跃响应离散状态空间模型的采样周期都设为Ts=5预测步长P=50 M=1都有了很好的效果4 %所以有两个重要的参数:采样周期Ts 预测步长P 还有M参数的作⽤,要弄清楚5 clear all6 %传递函数模型7 %{8 num=[8611.77];9 p1=[1,1.1,36.3025];10 p2=[1,0.5,237.2225];11 den=conv(p1,p2);12 sys=tf(num,den);13 %}14 sys=tf(0.6,[2400851]);1516 Ts=5;%Ts为采样周期17 delay=0;%延迟时间即纯滞后模块18 startvalue=0;%系统初始输出值19 x1=startvalue;20 x2=0;21 c=3;%阶跃值22 pipestartvalue=0;%管温初始值23 step1=101;%仿真长度注意变量名字不能与MATLAB中的函数名相同否则函数不能再调⽤24 %P=50;%效果最好之前⼀直不稳定可能是因为P取得太⼩或者是采样周期T保持了⼀致25 %M=1;26 P=50;27 M=1;28 Q=eye(P);%构造预测输出误差加权矩阵29for i=1:1:delay30 Q(i,i)=0;31 end %预测输出误差加权阵,对应纯滞后长度的权值为032 S=zeros(P);%构造移位矩阵33for i=1:1:P34if i<P35 S(i,i+1)=1;36 end37if i==P38 S(P,P)=1;39 end40 end41 R1=eye(M);%构造控制增量加权矩阵R42 %R=0.1*R1;43 R=0.0*R1;44 HT=linspace(1,1,P);45 H=HT';%构造误差校正向量46for i=2:1:P47 H(i)=0.9;48 end49 d1=linspace(0,0,M);%构造向量d50 d1(1)=1;51 d=d1;5253 %给单位阶跃响应序列a1赋值54 %{55for i=1:1:step156 a11(i)=1*(1-exp(-i*T/60));%采样周期T57 end58 figure59 plot(a11);title('阶跃响应1');60 %}61 t=0:5:500;62 %t=0:0.5:100;63 [a11,t0]=step(sys,t);%横轴时间与书上的数量级相差太⼤,不知原因64 figure65 plot(a11);title('阶跃响应step');66 %{67for i=1:1:4068 a11(i)=a1(10*i);%为了与书上的数量级保持⼀致乘以系数求预测模型参数书上的例5-169 end70 %}71 %{72 a1=1-1.1835*exp(-0.55*t).*sin(6*t+1.4973)-0.18038*exp(-0.25*t).*sin(15.4*t-1.541);73 figure74 plot(a1);title('表达式求得的阶跃响应');75 %}7677 %计算AT A为动态矩阵,AT为其转置78for i=1:1:P79for j=1:1:M80if j<=i81 A(i,j)=a11(i-j+1);82 end83if j>i&j<M84 A(i,j)=0;85 end86if i>M87 A(i,j)=a11(i-j+1);88 end89 end90 end91 AT=A';92 %计算DT93 DT=d*inv(AT*Q*A+R)*AT*Q;%计算得到控制向量DT94 a=a11(1:P);%计算a列向量95 %a=a';% %96 qu1=linspace(0,0,P);97 qu1(1)=1;%构建取1向量98for i=1:1:step199 Uk(i)=0;%初始化UK,⽤来记录控制量100 Yk1(i)=0;%初始化Yk1,⽤来记录实际仿真输出值101 end102 Uk=Uk';103 Yk1=Yk1';104for i=1:1:P105 Y0(i)=startvalue;%初始化106 Yp0k1(i)=0;107 Ycork1(i)=0;108 end109 Y0=Y0';110 Yp0k1=Yp0k1';111 Ycork1=Ycork1';112 y1k1=0;113 daltauk=0;%初始化控制增量114 uk1=pipestartvalue;% 0115 uk2=0;116 yk1=0;117 yk2=0;118for n=1:1:step1+90119 %x2=(0.98^(n*1))*1+(1-0.98^(n*1))*c;%参考轨迹参数a=0.992120 %x1=x2;121 Yrk1(n)=3;%计算参考轨迹yrk1,记录到Yrk1(i)122 %参考轨迹设为定值3 可以看出PID控制器输出有超调,⽽DMC可以快速稳定的达到设定值⽆超调123 end124 Yrk1=Yrk1';125 %仿真第⼀步126 Yp0k1=Y0;127 TempYrk1=Yrk1(1:P);128 daltauk=DT*(TempYrk1-Yp0k1);129 uk2=uk1+daltauk;%计算当前控制量uk130 uk1=uk2;131 Uk(1)=uk1;132 Yk1(1)=Y0(1);%第⼀步采样值保存到Yk1133 yk1=Y0(1);%第⼀步不⽤移位操作,直接取实际系统的输出值作为预测值134 Y1k1=Yp0k1+a*daltauk;%⼀步预测135 %{136 %Ts=5;137 As=[ -1.6,-17.13,-2.18,-8.41;16,0,0, 0; 0,8,0,0;0,0,8,0];%状态空间⽅程系数138 As=eye(4)+As*Ts;139 Bs=[4;0;0;0];140 Bs=Bs*Ts;141 Cs=[0,0,0,2.102];142 xs0=[0;0;0;0];143 xs1=[0;0;0;0];144 %}145146 %Ts=5;147 As=[-0.03542,-0.02667;0.01563,0];148 As=eye(2)+As*Ts;149 Bs=[0.125;0];150 Bs=Bs*Ts;151 Cs=[0,0.128];152 xs0=[0;0];153 xs1=[0;0];154155 %第⼆步及其以后的仿真156for i=2:1:step1157 %前15步,由于纯滞后,所以输出为0158 %if i<=delay159 %采样 yk1160 %yk2=-0.01667*yk1+0.125*0.1333*0;%对象离散模型161 %yk2=-0.2315*yk1+0.6991*0;162 %end163 %if i>delay164 %yk2=-0.01667*yk1+0.125*0.1333*Uk(i-delay);%离散模型的参数165 %yk2=-0.2315*yk1+0.6991*Uk(i-delay);166 %end167 xs1=As*xs0+Bs*uk1;168 yk2=Cs*xs1;169 xs0=xs1;170171 %if yk2<=startvalue172 % yk2=startvalue;173 %end174 yk1=yk2;175 Yk1(i)=yk1;%采样结束,并保存到Yk1中176 Y0k1=Y1k1;177 y1k1=qu1*Y0k1;%计算y1k1,即Y0k1的第⼀个元素178 Ycork1=Y0k1+H*(yk2-y1k1);%计算校正预测值179 Yp0k1=S*Ycork1;%移位,计算初始预测值180 TempYrk2=Yrk1(i:i+P-1);181 daltauk=DT*(TempYrk2-Yp0k1);182 uk2=uk1+daltauk;183 %{184if uk2>4;185 uk2=4;186 end187 %}188if uk2<0189 uk2=0;190 end191192 uk1=uk2;193 Uk(i)=uk1;194 Y1k1=Yp0k1+a*daltauk;%⼀步预测195 end196 Yrklend=Yrk1(1:step1);%整理计时器值,做曲线时使⽤197 figure198 x=Ts*(1:step1);199 plot(t,Yrklend,t,Yk1);%将实际输出与期望输出两条曲线画在⼀张图中,要保证⼆者⽮量长度相同200 title(['预测时域P=',num2str(P)]);201202 %以下为增量式PID控制算法203 y(1)=0;204 kp=0.35; % 0.4效果会好⼀些曲线形式相同205 ki=0.1; % 0.54206 kd=0.62; % 0.2207 actual=0;208 e=0;209 e1=0;210 e2=0;211 uk0_pid=0;212 x0=[0;0];213 x1=[0;0];214215for i=1:1:step1-1216 e=Yrk1(i)-actual;217 %e=set-actual;218 increase=kp*(e-e1)+ki*(e)+kd*(e-2*e1+e2);219 uk_pid=uk0_pid+increase;220 %y(i+1)=-0.2315*y(i)+0.6991*uk_pid;%离散模型参数离散模型参数可由传递函数得到ss(system) 221222 x1=As*x0+Bs*uk_pid;223 y(i+1)=Cs*x1;224 x0=x1;225226 e1=e;227 e2=e1;228 actual=y(i+1);229 uk0_pid=uk_pid;230 nums(i)=e;231 end232 Yrklend=Yrk1(1:step1);233 x=1.*(1:step1);234 figure235 plot(x,Yk1,'b',x,y,'r');%将DMC控制与PID控制的输出值,画在⼀张表上进⾏⽐较236 title(['预测时域P=',num2str(P)]);237 figure238 plot(x,y,'r');title(['采样周期Ts=',num2str(Ts)]);%PID控制器输出曲线注意参数的选择,尤其是采样周期Ts,控制时域P,⼀般都是先选定M,再调整P。
eigen动态矩阵参数eigen动态矩阵在计算机科学和数学领域中是一个非常重要的库。
它是一个用于线性代数运算的C++模板库,提供了矩阵、向量和线性代数运算相关的功能。
本文将介绍eigen动态矩阵的基本概念和一些常用的操作。
一、什么是eigen动态矩阵eigen动态矩阵是eigen库中的一个重要模块,它可以在运行时动态地创建和操作矩阵。
与静态矩阵相比,动态矩阵的大小在运行时可以根据需要进行调整,这使得它更加灵活和实用。
二、动态矩阵的创建和初始化使用eigen动态矩阵可以通过多种方式进行创建和初始化。
下面是一些常用的方法:1. 使用默认构造函数创建一个空的矩阵:```Eigen::MatrixXd matrix;```2. 使用指定大小的构造函数创建一个指定大小的矩阵:```Eigen::MatrixXd matrix(rows, cols);```3. 使用初始化列表创建一个矩阵:```Eigen::MatrixXd matrix = {{1, 2, 3}, {4, 5, 6}, {7, 8, 9}}; ```4. 使用随机数初始化矩阵:```Eigen::MatrixXd matrix = Eigen::MatrixXd::Random(rows, cols);```5. 从其他矩阵复制创建一个新的矩阵:```Eigen::MatrixXd matrix2 = matrix1;```三、动态矩阵的基本操作使用eigen动态矩阵可以进行各种常见的线性代数运算,包括矩阵加法、矩阵乘法、矩阵转置等。
1. 矩阵加法:使用"+"运算符进行矩阵相加。
```Eigen::MatrixXd result = matrix1 + matrix2;```2. 矩阵乘法:使用"*"运算符进行矩阵相乘。
```Eigen::MatrixXd result = matrix1 * matrix2;```3. 矩阵转置:使用transpose()函数进行矩阵转置。
多元动态矩阵控制多元动态矩阵控制是指在控制系统中,使用多个输入和输出信号,通过矩阵运算来实现对系统的控制。
这种控制方法可以适用于多种不同的系统,包括机械、电子、化工等领域。
多元动态矩阵控制的基本原理是将输入信号和输出信号表示为矩阵形式,并通过矩阵运算来实现对系统的控制。
这种方法可以有效地解决复杂系统中的非线性问题,并且可以应用于大规模系统的控制。
在多元动态矩阵控制中,需要使用一些基本的数学工具和技术。
其中最重要的是线性代数和微积分。
线性代数用于处理矩阵运算,微积分用于处理系统的动态行为。
在实际应用中,多元动态矩阵控制可以采用不同的方法来实现。
其中最常见的方法是状态反馈控制和最优控制。
状态反馈控制是指根据系统状态对输入信号进行调整,以达到预期目标。
最优控制则是通过优化目标函数来确定最佳输入信号。
无论采用哪种方法,多元动态矩阵控制都需要进行模型建立和参数估计。
模型建立是指根据系统的特性和动态行为,建立数学模型。
参数估计则是通过实验数据来确定模型中的参数。
多元动态矩阵控制在实际应用中具有广泛的应用。
例如,在机械领域中,可以使用多元动态矩阵控制来实现机器人的运动控制和轨迹跟踪。
在化工领域中,可以使用多元动态矩阵控制来实现反应器温度和压力的控制。
在电子领域中,可以使用多元动态矩阵控制来实现电路的稳定性和可靠性。
总之,多元动态矩阵控制是一种高效、灵活、可靠的控制方法,可以应用于各种不同类型的系统。
在实际应用中,需要根据具体情况选择合适的方法,并进行模型建立和参数估计。
通过这种方法,可以有效地解决复杂系统中的非线性问题,并提高系统的稳定性和可靠性。
动态矩阵控制算法实验报告院系:电子信息学院姓名:黄山学号:专业:控制理论与控制工程MATLAB环境下动态矩阵控制实验一、实验目的:通过对动态矩阵控制的MATLAB仿真,发现其对直接处理带有纯滞后、大惯性的对象,有良好的跟踪性和有较强的鲁棒性,输入已知的控制模型,通过对参数的选择,来取得良好的控制效果。
二、实验原理:动态矩阵控制算法是一种基于被控对象非参数数学模型的控制算法,它是一种基于对象阶跃响应的预测控制算法,它以对象的阶跃响应离散系数为模型,避免了通常的传递函数或状态空间方程模型参数的辨识,又因为采用多步预估技术,能有效解决时延过程问题,并按预估输出与给定值偏差最小的二次性能指标实施控制,它适用于渐进稳定的线性对象,系统的动态特性中具有纯滞后或非最小相位特性都不影响改算法的直接应用,因此是一种最优控制技术。
三、实验环境:计算机,matlab2010a四、实验步骤:动态矩阵控制算法充分利用了反映被控对象动态行为的有用信息,对被控对象时滞和阶次变化的鲁棒性都有所提高,从而得到好的控制性能。
但是由于动态矩阵预测控制采用模型预测的方式,其参数的选择对性能有重要的影响。
合理的选择控制参数非常重要,它直接影响着系统整体的控制效果。
对DMC来说,影响其性能的主要参数有以下几个。
1)采样周期T与模型长度N在DMC中采样周期T和模型长度N的选择需要满足香农定理和被控对象的类型及其动态特性的要求。
为使模型参数尽可能完整的包含被控对象的动态特征,通常要求NT后的阶跃响应输出值已经接近稳定值。
因此,T减小就会导致N增大,若T取得过小,N增大,会增加计算量。
而适当的选取采样周期,使模型长度控制在一定的范围内,避免因为采样周期减少而使模型长度增加使计算量增加,降低系统控制的实时性。
所以,从计算机内存和实时计算的需要出发,应选取合适的采样周期和模型长度。
2)预测时域长度P预测时域长度P对系统的稳定性和快速性具有重要的影响。
动态的矩阵式组织结构
动态的矩阵式组织结构是指随着公司规模、业务范围和市场需求的变化,组织结构也需要进行相应的调整和优化。
这种组织结构形式可以根据业务需求和项目要求进行动态的调整,使得组织结构更加灵活和高效。
在动态的矩阵式组织结构中,职能部门和项目小组之间的关系不再是固定的,而是可以根据需要进行动态的调整和优化。
例如,随着公司业务的扩大和项目数量的增加,可以增加相应的职能部门或项目小组,也可以根据需要合并或撤销某些部门或小组。
此外,动态的矩阵式组织结构还可以根据市场变化和客户需求进行动态的调整。
例如,随着市场需求的变化,可以增加或减少某些产品线或服务项目,也可以根据客户需求调整组织结构和业务流程。
总之,动态的矩阵式组织结构可以根据公司规模、业务范围和市场需求的变化进行动态的调整和优化,使得组织结构更加灵活和高效,能够更好地适应市场变化和客户需求。
MATLAB环境下动态矩阵控制实验
姓名:刘慧婷
学号:132030052
专业:控制理论与控制工程
课程:预测控制
指导老师:曾庆军
一算法实现
设某工业对象的传递函数为:G P(s)=e-80s/(60s+1),采用DMC后的动态特性如图1 所示。
在仿真时采样周期T=20s,优化时域P=10,控制时域M=2,建模时域N=20。
MATLAB程序1:
仿真结果如下图所示:
图中曲线为用DMC控制后系统的阶跃响应曲线。
从图中可以看出:采用DMC控
后系统的调整时间小,响应的快速性好,而且系统的响应无超调。
该结果是令人满意的。
二P和M对系统动态性能的影响
1.P对系统性能的影响
优化时域P表示我们对k时刻起未来多少步的输出逼近期望值感兴趣。
当采样期T=20s,控制时域M=2,建模时域N=20,优化时域P分别为6,10和20时的阶跃响应曲线
MATLAB程序2:
仿真结果如下图所示:
图中曲线1为P=6时的阶跃响应曲线;曲线2为P=10时的阶跃响应曲线;曲线
为P=20时的阶跃响应曲线。
从图中可以看出:增大P,系统的快速性变差,系统的稳定性增强;减小P,系统的快速性变好,稳定性变差。
所以P的选择应该兼顾快速性和稳定性。
2.M对系统性能的影响
控制时域M表示所要确定的未来控制量的改变数目。
当采样周期T=20s,优化时域P=20,建模时域N=20,控制时域M分别取4,2和1时系统的响应曲线如图3所示。
MATLAB程序3:
图中曲线1为M=4时的响应曲线;曲线2为M=2时的响应曲线;曲线3为M=1 时的响应曲线。
从图中可以看出:减小M,系统的快速性变差,系统的稳定性增强;增大M,系统的快速性变好,稳定性变差。
增大P和减小M效果类似,所以在选择时,可以先确定M再调整P,并且M小于等于P。
三模型失配时的响应曲线
当预测模型失配时,即当G M(S)≠G P(S),当G M(S)=2e-50s/(40s+1)时的响应曲线如图4所示。
MATLAB程序4:
图中曲线1为未失配时的阶跃响应曲线;曲线2为模型失配时的阶跃响应曲线。
从图中可以看出:当模型失配时,DMC控制有一定的超调,快速性下降,但能很快进入稳定状态,控制效果令人满意。
所以DMC在形成闭环控制时,对模型失配具有很好的鲁棒性。