动态矩阵控制算法
- 格式:doc
- 大小:52.50 KB
- 文档页数:7
动态矩阵算法在水箱液位控制中的应用引言:在工业生产和日常生活中,对于水箱液位控制的控制精度和稳定性要求越来越高。
水箱液位的控制算法起着至关重要的作用。
动态矩阵控制(Dynamic Matrix Control,DMC)算法是一种常用于过程控制的先进控制方法。
本文将探讨动态矩阵算法在水箱液位控制中的应用,包括算法原理、控制系统建模、控制器设计和实验验证等方面。
一、算法原理动态矩阵控制算法是一种模型预测控制(Model Predictive Control,MPC)方法,它基于离散时间多步骤预测模型。
其核心思想是通过对系统动态行为进行建模和预测,计算出最优控制方案,并根据实际反馈信息进行修正,以实现对系统的良好控制效果。
动态矩阵控制算法的基本步骤如下:1.系统建模:根据水箱液位控制过程的特点,建立系统的动态模型。
通常使用一阶惯性模型或一阶延迟模型来描述水箱液位的动态响应。
2.输入输出数据采集:通过传感器采集水箱液位和控制输入的数据,并对其进行离散化处理,使其适用于动态矩阵控制算法。
3.控制器设计:根据系统模型和控制目标,设计最优控制律。
动态矩阵算法主要包括预测模型、目标函数、约束条件等。
4.控制信号计算:基于当前的状态和控制输入的历史记录,使用动态矩阵算法计算出最优的控制信号。
5.控制执行:将计算得到的控制信号应用于实际控制系统中,调节水箱液位,并实时监控液位变化。
6.实时修正:根据实际反馈信息,对控制器中的参数进行修正,以提高控制效果和稳定性。
以上过程循环迭代,以不断调整控制信号,最终实现对水箱液位的精确控制。
二、控制系统建模在水箱液位控制中,我们需要对系统进行建模,以便进行后续的控制器设计和仿真。
通常采用一阶惯性模型或一阶延迟模型来描述水箱液位的动态响应。
一阶惯性模型:首先,假设水箱的液位变化满足一阶惯性动态方程:T * dH(t)/dt = k * (u(t) - H(t))其中,H(t)表示液位,u(t)表示输入控制信号,k表示液位变化的比例系数,T表示液位响应的时间常数。
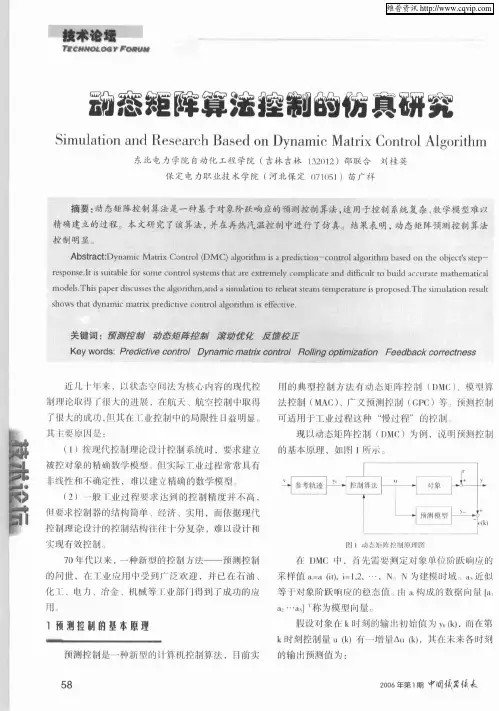
动态矩阵控制的稀土萃取优化控制平台董云彪鞍山市自来水总公司动态矩阵控制(dynamicmatrixcontrol,DMC)算法是一种基于对象阶跃响应预测模型、滚动实施并结合反馈校正的优化控制算法,是预测控制算法之一,由卡特勒等于1980年提出。
DMC算法适用于渐进稳定的线性对象。
由于该算法比较简单,计算量比较小,鲁棒性强,近年来已在冶金、石油、化工等工业过程控制中得到十分成功的应用。
工业过程控制通常是由许多互相作用的变量组成的多输入多输出(MIMO)系统,而常规的DMC算法是基于单输入单输出(SISO)系统的。
因此,许多学者自然地将其推广到了多输入多输出(MIMO)系统。
并取得了许多重要的成果:有采用将单变量DMC算法直接推广到多变量系统的MDMC方法;有通过变量之间关联预测设计,建立在解耦基础上的多变量DMC方法等。
余世明等针对多变量有约束的DMC问题,以输出预测值于未来参考轨迹序列误差的绝对值之和作为性能指标,通过线性化处理使其转换化为目的规划问题从而使在线滚动优化变得异常容易,并可充分利用全部操作变量优化系统的动态性能。
查星宇等针对工业现场犹豫条件的限制,很多过程变量所需的检测频率不一样的情况,提出了一种新的多频率多变量DMC算法,并且进一步用DMC方法推导多频多变量系统的预测方程、最优控制律及系统的内膜结构。
牛玉翔等针对高温力学材料试验机加热炉两通道相互耦合的问题,提出了多变量预测前馈补偿解耦DMC算法,并用线性时不变原理把该算法中需求解得2M元线性方程转化为只需求解二元一次方程组问题,使计算量大为减少。
针对实际多变量预测控制算法中存在的离线计算复杂、实时性较差等问题,金福江用大系统关联估计的思想。
提出了基于关联估计的递阶多变量动态矩阵控制算法,并将该算法应用于造纸机中,取得了较好的控制效果。
相对于传统的最优控制,DMC则采用了启发式优化的概念,允许设计者自由地选择优化性能指标的形式以及控制器参数。
动态矩阵控制算法
动态矩阵控制算法是一种用于控制系统的先进控制算法,它采用了矩阵的表示和演化方法。
其主要思想是将系统的状态和控制输入表示为矩阵,通过矩阵运算和演化来实现对系统的控制。
动态矩阵控制算法的核心思想是通过不断更新和演化控制矩阵来适应系统的变化。
它根据系统的反馈信息和目标要求,利用矩阵运算和优化算法来计算出最优的控制矩阵。
然后将该控制矩阵应用于系统中,以实现对系统的控制。
动态矩阵控制算法具有以下特点:
1. 矩阵表示:将系统的状态和控制输入表示为矩阵,方便进行矩阵运算和演化。
2. 自适应性:通过不断更新和演化控制矩阵,能够适应系统的变化和环境的变化。
3. 优化算法:利用优化算法来求解最优的控制矩阵,以满足系统的要求。
4. 实时性:动态矩阵控制算法能够在实时性要求较高的控制系统中应用,实现对系统的准确控制。
除了以上特点,动态矩阵控制算法还可以根据具体的系统和应用场景进行扩展和改进。
它在工业自动化、机器人控制、智能交通等领域具有广泛的应用前景。

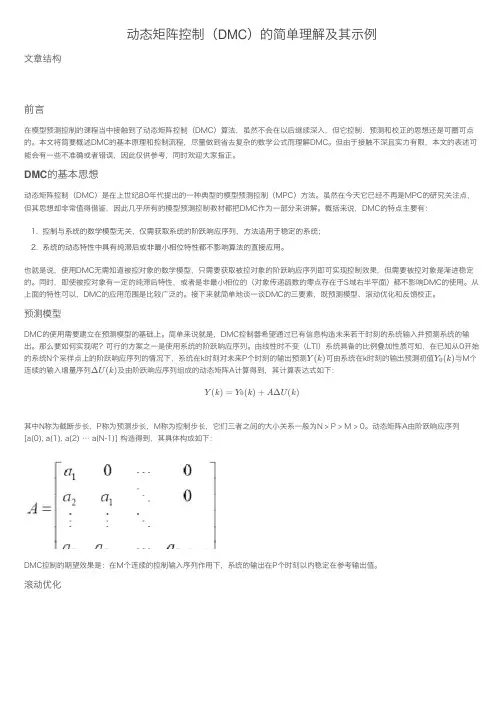
动态矩阵控制(DMC )的简单理解及其⽰例⽂章结构前⾔在模型预测控制的课程当中接触到了动态矩阵控制(DMC)算法,虽然不会在以后继续深⼊,但它控制、预测和校正的思想还是可圈可点的。
本⽂将简要概述DMC的基本原理和控制流程,尽量做到省去复杂的数学公式⽽理解DMC。
但由于接触不深且实⼒有限,本⽂的表述可能会有⼀些不准确或者错误,因此仅供参考,同时欢迎⼤家指正。
DMC 的基本思想动态矩阵控制(DMC)是在上世纪80年代提出的⼀种典型的模型预测控制(MPC)⽅法。
虽然在今天它已经不再是MPC的研究关注点,但其思想却⾮常值得借鉴,因此⼏乎所有的模型预测控制教材都把DMC作为⼀部分来讲解。
概括来说,DMC的特点主要有:1. 控制与系统的数学模型⽆关,仅需获取系统的阶跃响应序列,⽅法适⽤于稳定的系统;2. 系统的动态特性中具有纯滞后或⾮最⼩相位特性都不影响算法的直接应⽤。
也就是说,使⽤DMC⽆需知道被控对象的数学模型,只需要获取被控对象的阶跃响应序列即可实现控制效果,但需要被控对象是渐进稳定的。
同时,即使被控对象有⼀定的纯滞后特性,或者是⾮最⼩相位的(对象传递函数的零点存在于S域右半平⾯)都不影响DMC的使⽤。
从上⾯的特性可以,DMC的应⽤范围是⽐较⼴泛的。
接下来就简单地谈⼀谈DMC的三要素,既预测模型、滚动优化和反馈校正。
预测模型DMC的使⽤需要建⽴在预测模型的基础上。
简单来说就是,DMC控制器希望通过已有信息构造未来若⼲时刻的系统输⼊并预测系统的输出。
那么要如何实现呢?可⾏的⽅案之⼀是使⽤系统的阶跃响应序列。
由线性时不变(LTI)系统具备的⽐例叠加性质可知,在已知从0开始的系统N个采样点上的阶跃响应序列的情况下,系统在k时刻对未来P个时刻的输出预测可由系统在k时刻的输出预测初值与M个连续的输⼊增量序列及由阶跃响应序列组成的动态矩阵A计算得到,其计算表达式如下:其中N称为截断步长,P称为预测步长,M称为控制步长,它们三者之间的⼤⼩关系⼀般为N > P > M > 0。
动态矩阵控制算法研究及其软件实现的开题报告
一、研究背景及意义
动态矩阵控制(DMC)算法是一种基于模型预测控制的方法,其思路是通过对过去的系统输出数据进行回归分析,建立一个模型并预测未来输出,从而设计控制器输出
以实现对系统的控制。
该算法在实际工业控制中具有广泛应用,可应用于化工、电力、水利等领域,对提高企业产品质量和生产效率具有重要意义。
二、研究内容及方案
1. 理论研究:深入学习和理解DMC算法的基本原理、建模方法和控制思想,充
分掌握算法中各参数的意义及调整策略。
2. 算法实现:基于MATLAB或Python平台,根据所学理论知识,编写DMC算
法程序模块,并结合仿真软件验证算法的有效性和可行性。
3. 稳定性分析:对DMC算法的反馈控制效果、系统稳定性等相关指标进行分析
和评估,以进一步优化算法性能。
4. 系统集成:将DMC算法与实际工业控制系统相结合,并对算法进行实时优化
和更新,实现对系统的稳定控制。
三、预期成果及应用前景
1. 实现DMC算法的两种编程实现方式:MATLAB和Python,并验证算法的有效性和可行性。
2. 提出DMC算法优化方法和协调控制方案。
3. 制作DMC算法软件工具并进行推广使用,帮助企业提升生产效率,减少生产
成本,提高产品质量。
4. 在广泛应用的基础上,探索更优秀的控制算法,并为工业生产自动化奠定坚实的基础。
摘要(随着科学技术和生产的迅速发展,对复杂和不确定性系统实行自动控制的要求不断提高,为进一步改善控制品质,提高经济效益,必须采用多变量先进控制器.考虑到工程实践的需要,多变量过程控制的设计本质上是解一个多变量多目标有约束优化问题。
本论文从目标规划的角度出发提出了一种新型控制方法—模块多变量动态矩阵控胄IJ(MIvIDMC),并在此基础上对其进行了工程化且在实践中加以检验。
模块多变量控制器基于多目标系统线性规划的字典序极小化方法,以实现多目标有约束控制问题的显式求解为目的。
它采用模块化的控制器分层结构,将目标达成的任务分配至各控制模块中,并按照目标的优先级构成模块序列。
在控制求解时,控制器由高到低的顺序遍历各模块。
在各模块中对一个或多个控制量计算确定值或限定可行解范围,直到所有目标满足或控制量失去自由度。
在后一情况下,可能有部分低优先级目标得不到满足,但控制器保证了对高优先级目标的最大程度的满足,符合工业过程控制的要求。
卜—_—~本论文在对阶梯式模块多变量动态矩阵控制原理深入了解的基础上,利用相关系数法引入了对模型的在线自校正结构。
通过理论的深入分析研究,我们进一步把此种控制方法开发为较通用的控制软件包,通过统一接口向外界提供服务。
我们将这种控制方法在某石化炼油厂常压塔加热炉温度控制种进行了实际应用。
长期运行结果表明,该控制方法不仅能有效处理多类控制目标与约束,而且其结构灵活、对被控对象的增益摄动不敏感以及强鲁棒性等优点,也适合于实际生产控制的需要,具有广阔的应用前景。
文中还指出了算法中潜在的一些问题,提出了一些解决的构思和改进设想。
关键词:多变量多目标有约束控制,模块多变量控制,字典序极小化,主控制量,阶梯式控制策略.动态矩阵控制,面向对象,模型参数白校正。
第,页生竺竺竺苎兰苎竺曼竺苎苎苎————————曼墨Abstractanduncertainsy’stemsThedemandfortheautomaticcontrollingofcomplicatedwith雠rapiddevelopmentoftechnologyandcontinuouslyadvancedalongmanufacture.Forbettercontrolqualityandmoreeconomicbenefits,themulti-variableadvancedcontrollersmustbedeveloped.Consideringtheindustrialacquirement,thethecontrolsvstemformultivariableprocessisessentiallytosolveadesignofmultivariablemulti—objectconstrainedoptimalproblem.TMspaperstudiedthisproblemfromanewpointofview—·ot吁ectProgramming,thenconstructedanovelcontrolmeans—ModularMultivariableDynamicMatrixControlfMMDMC),hadengineerin91izedandcheckedupitbasedonthis.TheModularMultivariableCon打ollerisbasedontheLexicographicMinimization.methodtosolvethemulti—objectlinearprogrammingproblems.Thecontrollercanonesolvetheconstrainedcontrolproblemsexplicitly.Usingthemodularstratifiedstructure,thecontrollerassignsthegoalsintoeachcontrolmoduleandarrangesthemodulesintoaqueueaccordingtotheprioritiesofthegoals.Whenthesolutionisneeded,thecontrollervisitsallthemodulesfromhighpriorit、,tolowandcalculatetheValuesorlimitationsofthemanipulatedvariables.1Msprocedurestopswhenangoalsareachieyedorallmanipulatedvariableshavefixedvalues.Inthelatercase,somegoalsmaynotbefulfilled.Butthecontrollerdisregardsthesegoalsinordertoke印thehighprioritiesgoalssatisfied.Thisideafollowstheacquirementsoftheindustrialprocesscontr01taskAftermasteringtheprincipleofstair-likeModularMultivariableDynamicMatrixControl,weimportedtheself-amendationconstructwithmeansofcorrelationquotie押.WedeveloptherathergeneralsoftwarepackageafterthoroughanalysisandresearchandprovideservicesthroughtheUnitedinterface.weappliedthisMMDMCstrategyincommonpressurepyrochemicalfurnaceofeast-distillationdeviceatLiaoHeoiJ矗eldpetroleumrefinery.LongtermoperationhasandconstraintsefficientlyandprovedthatthecontrollercalIdealwithvarietiesofgoalsmatthecharacteristics,suchaschangeablestructure,bluntnesstotheplantuncertaint、randtheexcellentrobustness,aretheexpectationof出eindustrialapplication.Therefore,thecontrollerhastheprospectivewideutilizationinthefuture.ThepaperalsopointsoutsomepotentialproblemsinourCurrantalgorithm,andsomesolutionsandpromotionsaswell.KeyWords:MultivariableMulti—objoaConstrainedControl,ModularMultivariableControl,LexicographicMinimization,PrimaryManipulatedVariable,Stair-ⅡkeControlStrategy,DynamicMatrixControl,object-oriented?ModelParameterSelf-Amendation.横块善奄Ⅵ动态艇辞撞秘鼻注磅究s强甬-歼麓第2页致谢论文完稿之际,我要对我的导师吴刚呈上深深谢意。
第28卷总第68期 西北民族大学学报(自然科学版)Vol.28,No.4 2007年12月 Journal of No r th w est U n iver sity f o r N a tiona lities(Nat ural Science)Dec,2007基于RB F神经网络的动态矩阵控制算法王彩霞(西北民族大学电气工程学院,甘肃兰州730030)[摘 要]利用RB F网络对DMC算法进行结构上的改进,并用RBF网络的逼近性能建立预测模型,提出一种基于RBF神经网络建模的动态矩阵控制算法,并用该算法对典型的时滞系统进行仿真试验,结果表明该算法具有较高的控制精度和响应速度1[关键词]RBF神经网络;动态矩阵控制;时滞系统[中图分类号]O231;T B114.2 [文献标识码]A [文章编号]1009-2102(2007)04-0001-04由于工业过程中所涉及的复杂对象,很难保证到对象精确的数学模型,因此基于严格的数学模型在现代控制理论的综合方法使用中受到了很大的限制1动态矩阵控制[1](DMC)是一种基于非参数模型的预测控制,它以被控对象的实际阶跃响应为基础,适用于渐近稳定的线性对象,它无需知道系统传统的精确数学模型,并能将系统控制到较高的精度,重要的是它具有较强的鲁棒性,非常适用于时滞系统的控制;而神经网络具有较强的自学习、自适应能力,特别是径向基函数网络(RB F网络)是一类结构简单、收敛速度快的前向型网络,它具有全局逼近的性能,同时RB F神经网络不存在局部收敛问题.正是基于RB F网络的上述优点,本文选用RB F网络对DMC算法进一步进行结构上的改进,利用RBF网络的逼近性能建立预测模型,提出了一种基于RBF神经网络建模的动态矩阵控制算法,进一步提高控制性能11 径向基神经网络(RB F)[2]径向基函数神经网络一般用高斯函数(G aussian Function)作基,该网络具有逼近精度高、表示形式简单、隐层到输出层为线性关系、收敛速度快等特点1高斯函数神经网络是一种三层前向网络,第一层为输入层,由信号源节点组成,第二层为隐含层,其节点数的多少由具体问题确定,第三层为输出层1从输入空间到隐含空间的变换是非线性的,从隐含空间到输出空间的映射是线性的,隐含层的变换函数为高斯函数,它是一种对中心点径向对称且衰减、非负的非线性函数1其网络图及输入输出变量关系如下:控制、预测控制1[收稿日期]2007-09-30[基金项目]校级青年教师项目,项目名称为《大时滞系统的智能预测控制算法研究》11974[作者简介]王彩霞(—),女,河南荥阳人,研究方向为智能 输入层:x=[x1x2…x N]T隐含层输出:h j(x)=exp-‖x-c j‖22S2j=exp-(x1-c j1)2+…+(x N-c jN)22S2j,(j=1,2,…,M)1网络输出:y(x)=∑M i=1w j h j(x)12 径向基神经网络(RB F)建模RBF网络预测控制中,首先用RBF神经网络建立受控对象的模型作为预测模型,RB F网络的输入输出维数决定于受控对象的输入输出变量数,即取网络输入向量为:x(k)=[x1(k),x2(k),…,x N(k)]T=[y(k),y(k-1),…,y(k-n),Δu(k),Δu(k-1),Δu(k-m)]T,隐含层输出为:h j(x)=exp-‖x-c j‖22S2j=exp-(x1-c j1)2+…+(x N-c jN)22S2j,(j=1,2,…,M)1网络输出为:y m(k+1)=∑M j=1w j(k)h j[x(k)];定义目标函数为:E m=12[y(k+1)-y m(k+1)]21如果用梯度下降法来调整,则应有如下的调整公式:w j(k+1)=w j(k)-αj5E m5w j(k)=w j(k)+αj[y(k+1)-y m(k+1)]h j(k)1尽管高斯函数神经网络是一种通过调整连接权(局部)逼近的网络,实践中我们发现,高斯函数的形状参数和中心向量对网络输出影响很大,在它们固定不变的前提下,只有当输入落在中心向量附近时,才对输出有影响1而形状参数和中心向量往往人为选定,随机性大,所以,单靠调整连接权系数来逼近非线性,有时会出现收敛时间过长,逼近精度差的现象1为解决这个问题,提出增加调整基函数中心向量和形状参数的做法,它既不增加隐层神经元数目,又可提高逼近速度和精度1按梯度下降方法,给出下面的调整公式:c j(k+1)=c j(k)-βj5E m5c j(k)=c j(k)+βj[y(k+1)-y m(k+1)]5y m(k+1)5h j(k)5h j(k)5c j(k)=c j(k)+βj[y(k+1)-y m(k+1)]w j(k)h j(k)(x-c j(k))/s2j1s j(k+1)=s j(k)-γj5E m5s j(k)=s j(k)+γj[y(k+1)-y m(k+1)-y m(k+1)]5y m(k+1)5h j(k)5h j(k)5s j(k)=s j(k)+γ[y(k+1)-y m(k+1)]w j(k)h j(k)h j(k)x-c j(k)2/s2j1利用RB F神经网络对时滞系统进行辨识,MA TLAB仿真图如下:图 有干扰时RB F网络对时滞系统阶跃响应的辨识 图 有噪声时RB F神经网络对时滞系统的辩识12由图可见即使在带有白噪声和随机干扰的情况下,RBF神经网络仍然能对时滞系统进行良好的辨识,故可以利用RBF神经网络对时滞系统进行建模13 基于RB F神经网络建模的DMC算法根据DMC算法的特点和步骤,结合RB F神经网络建模,用RB F神经网络的输出作为动态矩阵控制中的预测模型的输出,时滞系统的智能DMC算法步骤如下:1)检测对象单位阶跃响应,确定系统的时滞;2)初始化RBF神经网络,初始化网络权系数、中心向量和形状参数,确定RB F网络隐含层节点中心和归一化系数(形状参数);3)合理确定控制参数P,M,Q和加权阵R,h,初始化ym,y,u,e14)根据动态矩阵控制率计算控制增量Δu[1],并送控制对象和神经网络模型输入端;5)求y m(k+1),采样y d(k+1),y(k+1),并计算e(k+1)=y(k+1)-y m(k+1);6)调整辨识网络的权系数、中心向量和形状参数;7)k→k+1,移位处理u(k),y(k),y m(k)后,转步骤4)14 仿真温度控制是工业生产中典型的过程控制问题,对温度准确的测量和有效的控制是一些设备优质高产、低耗和安全生产的重要指标1根据控制对象———电加热炉的特性:近似为纯滞后及一阶环节相串联的对象,同时考虑到控制参数无法精确测得,而且这些参数本身就是时变的,采用PID控制无法得到满意的控制效果,所以我们采用了动态矩阵控制(DMC)1假设被控对象是工业过程中普遍存在的一阶惯性加滞后系统[3],传递函数如下:G p(s)=K pT p s+1e-ds,其中K p=2,T p=4,d=4,用本文中提出的基于RB F网络的DMC算法进行仿真试验,仿真结果如下:图3 不同时滞时系统的智能DMC控制 图4 不同开环增益时系统的智能DMC控制由以上图中系统的响应曲线可以看出,采用本文中提出的算法对时滞系统进行控制后,由于模型精度提高,即预测输出更加准确,从而系统的动态响应过程上升速度加快,稳态误差为零而且动态误差减小过程明显加快,而且在开环增益变大以及系统时滞增加时仍然能保持很好的动、静态性能,可以获得较好的控制效果1参考文献:[1]席裕庚1预测控制[M]1北京:国防工业出版社,1993.[2]诸静等1智能预测控制及其应用[M]1杭州:浙江大学出版社,2000,12.[3]金以慧1过程控制[M]1北京:清华大学出版社,1993.Dynamic Matr ix Contr olAlgor ithm ba sed on RBF N eural N et w or kWANG Ca i-xia(Electrical Engineering College of Nort hwest Univer s ity of Northwest University for Nationalities,G a nsu Lanzhou 730030,China)[Abstract]Radial Basis Function Neural Net w ork(RB FNN)is adapt ed to improve t he st ruct ure of Dy2 namic Mat rix C ont rol(DMC)algori thm in t his i ng t he propert y of approximation of t he RBFNN to obt ain t he predictive model,an improved DMC algorit hm is proposed and applied to cont rol t ypical time -delay system t hrough simulat ion.The si mulati ng result s have shown t hat t he i mproved algorit hm has hi gher c ont rol accuracy and higher response speed than t hose of t he t radit ional algorit hm.[K ey w ords]RB F Neural Network;Dynamic Mat rix Cont rol;ti me-delay system。
动态矩阵控制算法实验报告院系:电子信息学院姓名:黄山学号:专业:控制理论与控制工程MATLAB环境下动态矩阵控制实验一、实验目的:通过对动态矩阵控制的MATLAB仿真,发现其对直接处理带有纯滞后、大惯性的对象,有良好的跟踪性和有较强的鲁棒性,输入已知的控制模型,通过对参数的选择,来取得良好的控制效果。
二、实验原理:动态矩阵控制算法是一种基于被控对象非参数数学模型的控制算法,它是一种基于对象阶跃响应的预测控制算法,它以对象的阶跃响应离散系数为模型,避免了通常的传递函数或状态空间方程模型参数的辨识,又因为采用多步预估技术,能有效解决时延过程问题,并按预估输出与给定值偏差最小的二次性能指标实施控制,它适用于渐进稳定的线性对象,系统的动态特性中具有纯滞后或非最小相位特性都不影响改算法的直接应用,因此是一种最优控制技术。
三、实验环境:计算机,matlab2010a四、实验步骤:动态矩阵控制算法充分利用了反映被控对象动态行为的有用信息,对被控对象时滞和阶次变化的鲁棒性都有所提高,从而得到好的控制性能。
但是由于动态矩阵预测控制采用模型预测的方式,其参数的选择对性能有重要的影响。
合理的选择控制参数非常重要,它直接影响着系统整体的控制效果。
对DMC来说,影响其性能的主要参数有以下几个。
1)采样周期T与模型长度N在DMC中采样周期T和模型长度N的选择需要满足香农定理和被控对象的类型及其动态特性的要求。
为使模型参数尽可能完整的包含被控对象的动态特征,通常要求NT后的阶跃响应输出值已经接近稳定值。
因此,T减小就会导致N增大,若T取得过小,N增大,会增加计算量。
而适当的选取采样周期,使模型长度控制在一定的范围内,避免因为采样周期减少而使模型长度增加使计算量增加,降低系统控制的实时性。
所以,从计算机内存和实时计算的需要出发,应选取合适的采样周期和模型长度。
2)预测时域长度P预测时域长度P对系统的稳定性和快速性具有重要的影响。
MATLAB 环境下动态矩阵控制实验
一 算法实现
设某工业对象的传递函数为:G P (s)=e -80s /(60s+1),采用DMC 后的动态特性如图1所示。
在仿真时采样周期T=20s ,优化时域P=10,控制时域M=2,建模时域N=20。
MATLAB 程序1:
g=poly2tfd(1,[60 1],0,80);%通用传递函数模型转换为MPC 传递函数模型 delt=20; %采样周期
nt=1; %输出稳定性向量
tfinal=1000; %截断时间
model=tfd2step(tfinal,delt,nt,g);%传递函数模型转换为阶跃响应模型
plant=model; %进行模型预测控制器设计
p=10; %优化时域
m=2; %控制时域
ywt=[];uwt=1; %设置输入约束和参考轨迹等控制器参数 kmpc=mpccon(plant,ywt,uwt,m,p);%模型预测控制器增益矩阵计算
tend=1000;r=1; %仿真时间
[y,u,yrn]=mpcsim(plant,model,kmpc,tend,r);%模型预测控制仿真
t=0:20:1000;
plot(t,y)
xlabel('图1 DMC 控制系统的动态阶跃响应曲线(time/s)');
ylabel('响应曲线');
00.2
0.4
0.6
0.81
1.2
1.4
图1 DMC 控制系统的动态阶跃响应曲线(time/s)响应曲线
图中曲线为用DMC 控制后系统的阶跃响应曲线。
从图中可以看出:采用DMC 控制后系统的调整时间小,响应的快速性好,而且系统的响应无超调。
该结果是令人满意的。
二P和M对系统动态性能的影响
1.P对系统性能的影响
优化时域P表示我们对k时刻起未来多少步的输出逼近期望值感兴趣。
当采样周期T=20s,控制时域M=2,建模时域N=20,优化时域P分别为6,10和20时的阶跃响应曲线如图2所示。
MATLAB程序2:
g=poly2tfd(1,[60 1],0,80);%通用传递函数模型转换为MPC传递函数模型
delt=20; %采样周期
nt=1; %输出稳定性向量
tfinal=1000; %截断时间
model=tfd2step(tfinal,delt,nt,g);%传递函数模型转换为阶跃响应模型
plant=model; %进行模型预测控制器设计
p1=6;p2=10;p3=20; %优化时域
m=2; %控制时域
ywt=[];uwt=1;
kmpc1=mpccon(plant,ywt,uwt,m,p1);
kmpc2=mpccon(plant,ywt,uwt,m,p2);
kmpc3=mpccon(plant,ywt,uwt,m,p3);
tend=1000;r=1;
[y1,u,yrn]=mpcsim(plant,model,kmpc1,tend,r);
[y2,u,yrn]=mpcsim(plant,model,kmpc2,tend,r);
[y3,u,yrn]=mpcsim(plant,model,kmpc3,tend,r);
t=0:20:1000;
plot(t,y1,t,y2,t,y3)
legend('1-p=6','2-p=10','3-p=20');
xlabel('图2 P不同对系统性能的影响(time/s)');
ylabel('响应曲线');
0100
2003004005006007008009001000
00.2
0.4
0.6
0.81
1.2
1.4
图2 P 不同对系统性能的影响(time/s)响应曲线
图中曲线1为P=6时的阶跃响应曲线;曲线2为P=10时的阶跃响应曲线;曲线3为P=20时的阶跃响应曲线。
从图中可以看出:增大P ,系统的快速性变差,系统的稳定性增强;减小P ,系统的快速性变好,稳定性变差。
所以P 的选择应该兼顾快速性和稳定性。
2.M对系统性能的影响
控制时域M表示所要确定的未来控制量的改变数目。
当采样周期T=20s,优化时域P=20,建模时域N=20,控制时域M分别取4,2和1时系统的响应曲线如图3所示。
MATLAB程序3:
g=poly2tfd(1,[60 1],0,80);%通用传递函数模型转换为MPC传递函数模型
delt=20; %采样周期
nt=1; %输出稳定性向量
tfinal=1000; %截断时间
model=tfd2step(tfinal,delt,nt,g);%传递函数模型转换为阶跃响应模型
plant=model; %进行模型预测控制器设计
p=20; %优化时域
m1=4;m2=2;m3=1; %控制时域
ywt=[];uwt=1;
kmpc1=mpccon(plant,ywt,uwt,m1,p);
kmpc2=mpccon(plant,ywt,uwt,m2,p);
kmpc3=mpccon(plant,ywt,uwt,m3,p);
tend=1000;r=1;
[y1,u,yrn]=mpcsim(plant,model,kmpc1,tend,r);
[y2,u,yrn]=mpcsim(plant,model,kmpc2,tend,r);
[y3,u,yrn]=mpcsim(plant,model,kmpc3,tend,r);
t=0:20:1000;
plot(t,y1,t,y2,t,y3)
legend('1-m=4','2-m=2','3-m=1');
xlabel('图2 M不同对系统性能的影响(time/s)');
ylabel('响应曲线');
0100
2003004005006007008009001000
00.2
0.4
0.6
0.81
1.2
1.4
图2 M 不同对系统性能的影响(time/s)响应曲线
图中曲线1为M=4时的响应曲线;曲线2为M=2时的响应曲线;曲线3为M=1时的响应曲线。
从图中可以看出:减小M ,系统的快速性变差,系统的稳定性增强;增大M ,系统的快速性变好,稳定性变差。
增大P 和减小M 效果类似,所以在选择时,可以先确定M 再调整P ,并且M 小于等于P 。
三模型失配时的响应曲线
当预测模型失配时,即当G M(S)≠G P(S),当G M(S)=2e-50s/(40s+1)时的响应曲线如图4所示。
MATLAB程序4:
g1=poly2tfd(1,[60 1],0,80);%通用传递函数模型转换为MPC传递函数模型
g2=poly2tfd(2,[40 1],0,50);
delt=20; %采样周期
nt=1; %输出稳定性向量
tfinal=1000; %截断时间
model1=tfd2step(tfinal,delt,nt,g1);%传递函数模型转换为阶跃响应模型
model2=tfd2step(tfinal,delt,nt,g2);
plant1=model1; %进行模型预测控制器设计
plant2=model2;
p=10; %优化时域
m=2; %控制时域
ywt=[];uwt=1; %设置输入约束和参考轨迹等控制器参数
kmpc1=mpccon(plant1,ywt,uwt,m,p);%模型预测控制器增益矩阵计算
kmpc2=mpccon(plant2,ywt,uwt,m,p);
tend=1000;r=1; %仿真时间
[y1,u,yrn]=mpcsim(plant1,model1,kmpc1,tend,r);%模型未失配时的预测控制仿真
[y2,u,yrn]=mpcsim(plant1,model2,kmpc2,tend,r);%模型失配时的预测控制仿真
t=0:20:1000;
plot(t,y1,t,y2)
legend('1-模型未失配','2-模型失配');
xlabel('图4 模型失配时的响应曲线(time/s)');
ylabel('响应曲线');
0100200300400500600700800
9001000
00.2
0.4
0.6
0.81
1.2
1.4
图4 模型失配时的响应曲线(time/s)响应曲线
图中曲线1为未失配时的阶跃响应曲线;曲线2为模型失配时的阶跃响应曲线。
从图中可以看出:当模型失配时,DMC 控制有一定的超调,快速性下降,但能很快进入稳定状态,控制效果令人满意。
所以DMC 在形成闭环控制时,对模型失配具有很好的鲁棒性。