现在控制理论第四章
- 格式:ppt
- 大小:2.31 MB
- 文档页数:92

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b aa 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
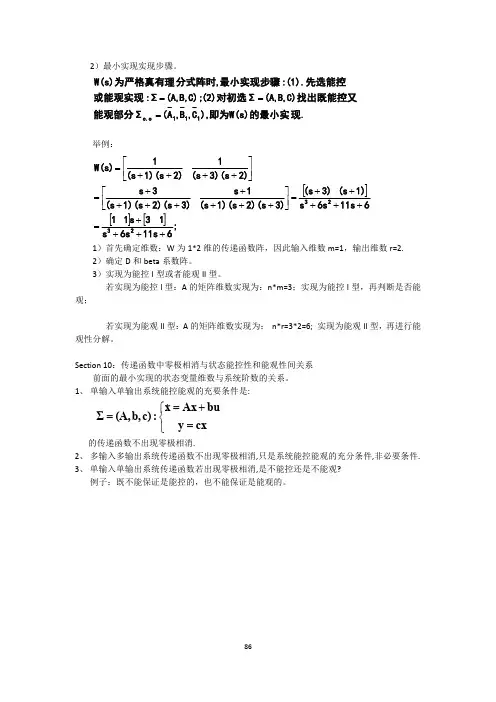
2)最小实现实现步骤。
现.即为W(s)的最小实),C ,B ,A (能观部分ΣC)找出既能控又B,(A,(2)对初选ΣC);B,(A,Σ:或能观实现(1).先选能控:最小实现步骤分式阵时,W(s)为严格真有理111c.o ~~~===举例:[][][];611s 6s s 13s 11611s 6s s 1)(s 3)(s 3)2)(s 1)(s (s 1s 3)2)(s 1)(s (s 3s 2)3)(s (s 12)1)(s (s 1W(s)2323++++=+++++=⎥⎦⎤⎢⎣⎡++++++++=⎥⎦⎤⎢⎣⎡++++= 1)首先确定维数:W 为1*2维的传递函数阵,因此输入维数m=1,输出维数r=2.2)确定D 和beta 系数阵。
3)实现为能控I 型或者能观II 型。
若实现为能控I 型:A 的矩阵维数实现为:n*m=3;实现为能控I 型,再判断是否能观;若实现为能观II 型:A 的矩阵维数实现为: n*r=3*2=6; 实现为能观II 型,再进行能观性分解。
Section 10:传递函数中零极相消与状态能控性和能观性间关系前面的最小实现的状态变量维数与系统阶数的关系。
1、 单输入单输出系统能控能观的充要条件是:⎩⎨⎧=+==cx y bu Ax x :c)b,(A,Σ&的传递函数不出现零极相消.2、 多输入多输出系统传递函数不出现零极相消,只是系统能控能观的充分条件,非必要条件.3、 单输入单输出系统传递函数若出现零极相消,是不能控还是不能观?例子:既不能保证是能控的,也不能保证是能观的。
第四章 稳定性与李雅普诺夫方法提问:1、个人所理解的系统稳定性是指什么?2、自控原理中,曾经学过的系统稳定性含义是什么?如何判定的?本章学习内容:李雅普诺夫关于稳定性的定义和判定系统是否是李雅普诺夫稳定的?一、系统的运动状态和平衡状态。
1、系统的运动状态:外界输入为0,从初始点X 0开始,系统的状态存在唯一解 X(t)=Φ(t, x0, t)。

现代控制理论讲义第四章矩阵范数和奇异值分解4.1 引言在这一讲中,我们将引入矩阵范数的概念。
之后会介绍矩阵的奇异值分解或者叫SVD。
SVD 揭示了矩阵的2范数,它的值意义更大:它使一大类矩阵扰动问题得以解决,同时也为后面稳定鲁棒性的概念打下基础;它还解决了所谓的完全最小二乘问题,该问题是我们前面讲的最小二乘问题的推广;还帮我们澄清在矩阵求逆计算中碰到的态性的概念。
在下一讲中,我们会花更大的篇幅来叙说SVD的应用。
例 4.1 为了提高大家对矩阵范数研究和应用的兴趣,我们首先从一个例子开始,该例子提出了与矩阵求逆有关的矩阵态性问题。
我们所感兴趣的问题是矩阵求逆对矩阵扰动的敏感程度。
考虑求下列矩阵的逆马上就可以求得现在我们假设对一个受到扰动的矩阵求逆求逆后,结果就成了在这里表示A中的扰动,表示中的扰动。
显然中一项的变化会导致中的变化。
如果我们解,其中,得到,加入扰动后,解得。
在这个结果中,我们仍然可以清楚的看到开始数据仅有的变化,却导致解产生的变化。
以上例子中我们看到的要比在标量情况下差的多。
如果是标量,那么,所以的倒数中小数部分的变化和的变化在同一量级上。
因此,在上例中的现象完全是在矩阵的时候才出现的。
看上去好像和是近似奇异的事实有关——因为它的列几乎不独立,且它的行列式值要比它的最大元素小很多,等等。
随后(见下一讲),我们会找到衡量奇异程度的合理方法,同时还要说明在求逆情况下,这种方法和灵敏度的关系如何。
在理解这种灵敏度和扰动的细节关系之前,我们首先要找到度量向量和矩阵量级的方法。
在第一讲中我们已经引入了向量范数的概念,所以我们现在来看一下矩阵范数的定义。
4.2 矩阵范数一个维复数矩阵可以看成(有限维)赋范向量空间中的一个算子:其中,这里的范数指的是标准欧氏范数。
定义的归纳2-范数如下:术语“归纳”是指在向量和的范数的基础上,使得以上矩阵范数的定义有意义。
该定义中,归纳范数表示矩阵在中单位圆上向量扩大的倍数,也就是说,它表示矩阵的增益。

现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:(1)222123122313()31122Q x x x x x x x x x x =---+-- (2)222123122313()4262v x x x x x x x x x x =++---解:(1)由已知得[]11231231232311232311()31122111113211112x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎡⎤⎢⎥=-+------⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎡⎤⎢⎥--⎡⎤⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥---⎣⎦110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 (2)由已知得[][]112312312323112323()433111143131x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎢⎥=---+---+⎢⎥⎢⎥⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:11122122a a xx a a ⎛⎫= ⎪⎝⎭试确定系统在平衡状态处大范围渐进稳定的条件。
解:方法(1):要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部。
即:111221222112211221221()0a a I A a a a a a a a a λλλλλ---=--=-++-= 有解,且解具有负实部。
即:1122112212210a a a a a a +<>且方法(2):系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-。
III、综合部分第四早线性多变量系统的综合与设计4.1引言前面我们介绍的内容都属于系统的描述与分析。
系统的描述主要解决系统的建模、各种数学模型(时域、频域、内部、外部描述)Z间的相互转换等;系统的分析,则主要研究系统的定量变化规律(如状态方程的解,即系统的运动分析等)和定性行为(如能控性、能观测性、稳定性等)。
而综合与设计问题则与此相反,即在己知系统结构和参数(被控系统数学模型)的基础上,寻求控制规律,以使系统具有某种期望的性能。
一般说来,这种控制规律常取反馈形式,因为无论是在抗干扰性或鲁棒性能方面,反馈闭环系统的性能都远优于非反馈或开环系统。
在本章中,我们将以状态空间描述和状态空间方法为基础,仍然在吋域中讨论线性反馈控制规律的综合与设计方法。
4. 1. 1问题的提法给定系统的状态空间描述若再给定系统的某个期望的性能指标,它既可以是时域或频域的某种特征量(如超调量、过渡过程时间、极、零点),也可以是使某个性能函数取极小或极大。
此时,综合问题就是寻求一个控制作用u,使得在该控制作用下系统满足所给定的期望性能指标。
对于线性状态反馈控制律u = -Kx + r对于线性输岀反馈控制律u = -Ffy + r其中r e R'为参考输入向量。
由此构成的闭环反馈系统分别为x - {A- BK)x+ Br y-Cx或x = {A-BHC)x+Br y = Cx闭坏反馈系统的系统矩阵分别为九=A — BKA H=A-BHC即工K = (A—BK,B,C)或工〃=(A—BHC,B,C)°闭环传递函数矩阵G K⑶=C '[si-(A-BK)Y] BG H G) = C_,[si-(A-BHOf B我们在这里将着重指出,作为综合问题,将必须考虑三个方面的因素,即1)抗外部干扰问题;2)抗内部结构与参数的摄动问题,即鲁棒性(Robustness)问题;3)控制规律的工程实现问题。
一般说来,综合和设计是两个有区别的概念。
第4章“线性系统的能控性与能观性”习题与解答4.1 判断下列系统的能控性。
1) u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡10 01112121 2) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321111001342100010u u x x x x xx3) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321020011 10030013u u x x x x xx解:1) 由于该系统控制矩阵⎥⎦⎤⎢⎣⎡=01b ,系统矩阵⎥⎦⎤⎢⎣⎡=0111A ,所以 ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=1101 0111Ab 从而系统的能控性矩阵为[]⎥⎦⎤⎢⎣⎡==1011Ab bU C 显然有[]n Ab bU C ===2rank rank满足能控性的充要条件,所以该系统能控。
2)由于该系统控制矩阵为100111B ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=342100010A 则有,0101001001 01112431117AB ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-----⎣⎦⎣⎦⎣⎦ 20100111001 111724317115A B -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦从而系统的能控性矩阵为21001110111171117115C U BABA B -⎡⎤⎢⎥⎡⎤==--⎣⎦⎢⎥⎢⎥--⎣⎦有n U C ==3rank满足能控性的充要条件,所以该系统能控。
3)由于该系统控制矩阵为110020B -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=10030013A 则有,3101133030 00000012020AB ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ 23103399030 0000012020A B ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦于是,系统的能控性矩阵为21133990000002220C U BABA B ---⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦可知n U C <=2rank不满足能控性的充要条件,所以该系统不完全能控。