现代控制理论第4章答案
- 格式:doc
- 大小:235.50 KB
- 文档页数:6

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b aa 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。


现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。
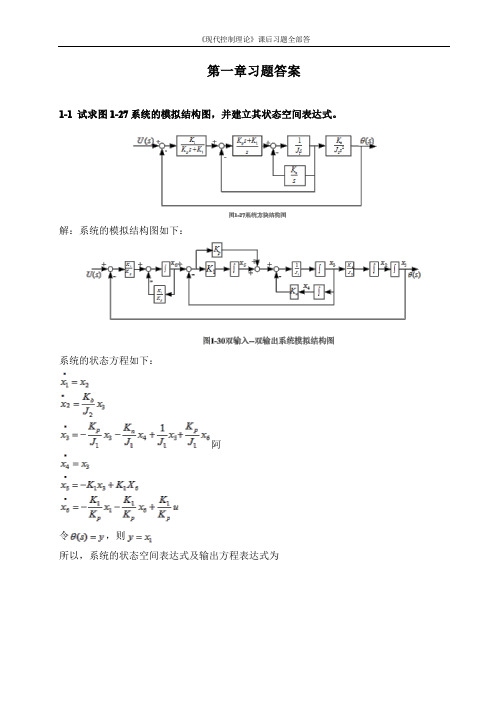
第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。
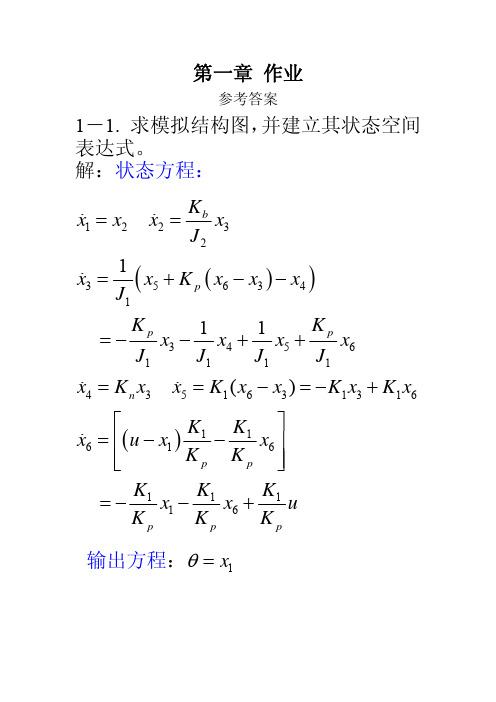


《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。



第四章作业:4-6, 4-17习 题 4-1 试判断下列系统的能控性(1)u x x xx⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡5220012121 (2)u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡022******* (3)u x x x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡001400101123321321 (4) ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡21212120112110u u x x x x(5)u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡0110112121 (6)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡21212110011211u u x x x x(7)u x x x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡340200010011321321 (8)⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321030024200010011u u x x x x x x(9)u x x x x x x x x x x⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡0312450000150000020000120000125432154321(10)⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡21543215432112000300105000015000002000012000012u u x x x x x x x x x x4-2 设系统的方程为u c b a x x x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321001001λλλ 试确定满足状态完全能控的a ,b 和c 。


现代控制理论智慧树知到课后章节答案2023年下哈尔滨工程大学哈尔滨工程大学绪论单元测试1.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
A:对 B:错答案:错2.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
A:对 B:错答案:对3.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
A:对 B:错答案:对4.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
A:对 B:错答案:对5.下述描述中哪些作为现代控制理论形成的标志()。
A:用于系统的整个描述、分析和设计过程的状态空间方法 B:随机系统理论中的Kalman滤波技术 C:最优控制中的Pontriagin极大值原理和Bellman动态规划 D:最优控制理论的产生答案:用于系统的整个描述、分析和设计过程的状态空间方法;随机系统理论中的Kalman滤波技术;最优控制中的Pontriagin极大值原理和Bellman动态规划第一章测试1.输入输出描述是描述系统输入变量和输出变量关系的模型。
A:对 B:错答案:对2.状态空间描述能完全表征系统的一切动力学特征。
A:对 B:错答案:对3.系统的状态是指能够完全表征系统时间域行为的一个最小内部变量组。
A:对 B:错答案:对4.系统的状态空间描述是唯一的。
A:错 B:对答案:错5.坐标变换是指将系统在状态空间的一个基底上的表征,化为另一个基底上的表征。
A:错 B:对答案:对6.当状态空间描述中的A矩阵有相同的特征值时,一定不能将其化成对角规范形。
A:错 B:对答案:错7.并联组合系统的传递函数矩阵为各并联子系统的传递函数矩阵之和。
A:对 B:错答案:对8.若两个子系统输出向量的维数相同,则可实现反馈连接。

第4章“线性系统的能控性与能观性”习题与解答4.1 判断下列系统的能控性。
1) u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡10 01112121 2) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321111001342100010u u x x x x xx3) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321020011 10030013u u x x x x xx解:1) 由于该系统控制矩阵⎥⎦⎤⎢⎣⎡=01b ,系统矩阵⎥⎦⎤⎢⎣⎡=0111A ,所以 ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=1101 0111Ab 从而系统的能控性矩阵为[]⎥⎦⎤⎢⎣⎡==1011Ab bU C 显然有[]n Ab bU C ===2rank rank满足能控性的充要条件,所以该系统能控。
2)由于该系统控制矩阵为100111B ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=342100010A 则有,0101001001 01112431117AB ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-----⎣⎦⎣⎦⎣⎦ 20100111001 111724317115A B -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦从而系统的能控性矩阵为21001110111171117115C U BABA B -⎡⎤⎢⎥⎡⎤==--⎣⎦⎢⎥⎢⎥--⎣⎦有n U C ==3rank满足能控性的充要条件,所以该系统能控。
3)由于该系统控制矩阵为110020B -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=10030013A 则有,3101133030 00000012020AB ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ 23103399030 0000012020A B ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦于是,系统的能控性矩阵为21133990000002220C U BABA B ---⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦可知n U C <=2rank不满足能控性的充要条件,所以该系统不完全能控。

第一章测试1.系统前向通道传递函数阵为,反馈通道传递函数阵为,则系统闭环传递函数为()。
A:B:C:D:答案:B2.下面关于线性时不变系统的系统矩阵说法错误的是()。
A:由系统矩阵可以得到系统的运动模态。
B:具有相同特征值的系统矩阵,鲁棒稳定性是一样的。
C:系统矩阵的形式决定着系统的稳定性质。
D:系统矩阵不同,系统特征值可能相同。
答案:B3.下面关于状态空间模型描述正确的是()。
A:对一个系统,只能选取一组状态变量。
B:模型的阶数就是系统中含有储能元件的个数。
C:代数等价的状态空间模型具有相同的特征多项式和稳定性。
D:对于线性定常系统的状态空间模型,经常数矩阵非奇异变换后的模型,其传递函数阵是的零点是有差别的。
答案:C4.线性变换不改变系统的()A:状态变量B:特征值C:状态方程D:传递函数答案:BD5.对于同一控制系统,只能选取一组状态变量。
()A:对B:错答案:B第二章测试1.非齐次状态方程的解包含零状态响应和零输入响应两部分。
()A:对B:错答案:A2.系统的状态方程为齐次方程,若初始时刻为0,,则其解为()。
A:B:D:答案:A3.下面关于线性连续系统的状态转移矩阵描述错误的是()。
A:状态转移矩阵不唯一B:C:D:答案:A4.已知线性连续系统的状态空间表达式为,对该系统进行离散化为状态空间表达式为,其中采样周期为T,那么下列正确的是()A:H=BB:G=AC:C=CD:D=D答案:CD5.对于线性定常系统,若系统矩阵A为,则系统的状态转移矩阵为()。
A:B:1C:D:答案:C第三章测试1.下面关于连续线性系统的能观性说法错误的是()。
A:常数非奇异变换不改变系统的能观性。
B:能观性表征了输出反映内部状态的能力。
C:一个系统不能观,意味着存在满足D:系统状态若不完全能观,则一定可以将状态分成完全能观子空间和不完全能观的子空间,这两个子空间完全正交。
答案:C2.下面关于连续线性系统的能控性说法正确的是()。

第4章测验题(共3题,时间:30分钟)1、若系统的齐次状态方程为),(t x f x= ,若存在状态矢量x e ,对于所有t ,都使x e 称为系统的平衡状态。
2、若二次型标量函数V (X )=V (x 1,x 2)=22212125x x x x ++, 若写成V (X )= X T PX 的形式(P 为对称阵),则PP 的符号性质为:。
3、系统状态空间表达式为u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=013502 ,[]x y 11-=, (1)判断系统在平衡状态处的稳定性。
(2)分析系统的输出稳定性。
解:(1)令0=x ,易知该系统具有唯一一个平衡点为⎥⎦⎤⎢⎣⎡=00e x 。
设⎥⎦⎤⎢⎣⎡=22121211p p p p P ,取Q=I ,解李亚普诺夫方程PA+A T P=-I ,可得:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=61656537P 易知矩阵P 的符号性质为不定,所以系统在平衡点处不是渐近稳定的。
也可取⎥⎦⎤⎢⎣⎡=1000Q 为半正定阵,则22)(x Qx x x V T =-= ,易证明仅当x=0时0)(≡x V,因此Q 的选取合理。
解李亚普诺夫方程PA+A T P= -Q 求出⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=6165651225P ,P 阵符号也为不定,故系统在平衡点处不是渐近稳定的,但无法判断系统是李亚普诺夫意义稳定还是不稳定。
说明:通过第一方法可求得系统的特征值为2和-3,存在具有正实部的特征值,因此系统是不稳定的。
此外,通过求解该系统的自由解可知⎥⎦⎤⎢⎣⎡-+=-t t te x x e x e x t x 31020210210)()(,易知系统的状态是发散的,故系统是不稳定的。
(2)对于系统的输入输出稳定性分析:系统传递函数为31)3)(2()2()()(1+=+--=-=-s s s s B A sI C s G , 唯一极点为-3,位于s 平面左半平面,因此系统为输出稳定。

现代控制理论智慧树知到课后章节答案2023年下临沂大学临沂大学绪论单元测试1.现代控制理论的主要内容()A:最优控制B:非线性系统理论C:线性系统D:系统辨识答案:最优控制;非线性系统理论;线性系统;系统辨识2.现代控制理论运用哪些数学工具()A:微分方程B:线性代数C:几何学D:数理统计答案:微分方程;线性代数3.控制论是谁发表的()A:奈奎斯特B:劳伦斯C:维纳D:钱学森答案:维纳4.大系统和与智能控制理论和方法有哪些()A:鲁棒控制B:最优估计C:最优控制D:系统辨识答案:鲁棒控制;最优估计;最优控制;系统辨识5.下面哪个不是大系统的特点()A:规模庞大B:信息复杂且多C:运用人力多D:结构复杂答案:运用人力多6.哪个不是20世纪三大科技()A:进化论B:智能控制理论C:空间技术D:原子能技术答案:进化论7.经典控制理论形成的目的是采用各种自动调节装置来解决生产和军事中的简单控制问题。
()A:错 B:对答案:对8.自适应控制所要解决的问题也是寻求最优控制律,自适应控制所依据的数学模型由于先验知识缺少,需要在系统运行过程中去提取有关模型的信息,使模型逐渐完善。
()A:错 B:对答案:对9.非线性系统状态的运动规律和改变这些规律的可能性与实施方法,建立和揭示系统结构、参数、行为和性能之间的关系。
()A:错 B:对答案:对10.现代控制理论是建立在状态空间法基础上的一种控制理论。
()A:对 B:错答案:对第一章测试1.下面关于建模和模型说法正确的是()A:无论是何种系统,其模型均可用来提示规律或者因果关系。
B:为设计控制器为目的建立只需要简练就可以了。
C:工程系统模型建模有两种途径,一是机理建模,而是系统辨识。
D:建模实际上是通过数据,图表,数学表达式,程序,逻辑关系或者各种方式的组合表示状态变量,输入变量,输出变量,参数之间的关系。
答案:无论是何种系统,其模型均可用来提示规律或者因果关系。
;工程系统模型建模有两种途径,一是机理建模,而是系统辨识。

现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:(1)222123122313()31122Q x x x x x x x x x x =---+-- (2)222123122313()4262v x x x x x x x x x x =++---解:(1)由已知得[]11231231232311232311()31122111113211112x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎡⎤⎢⎥=-+------⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎡⎤⎢⎥--⎡⎤⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥---⎣⎦110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 (2)由已知得[][]112312312323112323()433111143131x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎢⎥=---+---+⎢⎥⎢⎥⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:11122122a a xx a a ⎛⎫= ⎪⎝⎭试确定系统在平衡状态处大范围渐进稳定的条件。
解:方法(1):要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部。
即:111221222112211221221()0a a I A a a a a a a a a λλλλλ---=--=-++-= 有解,且解具有负实部。
即:1122112212210a a a a a a +<>且方法(2):系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-。
取Q I =,令11121222P P P P P ⎡⎤=⎢⎥⎣⎦,则带入T A P PA Q +=-,得到 1121111211222112122222220100221a a P a a a a P a a P -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦若 11211211222111221122122112222204()()0022a a a a a a a a a a a a a a +=+-≠,则此方程组有唯一解。
即22212212222111221222211111121122()1()2()A a a a a a a P a a a a A a a a a A ⎡⎤++-+=-⎢⎥-++++⎣⎦其中11221221det A A a a a a ==- 要求P 正定,则要求222122111112202()A a a P a a A++∆==>-+221122122121122()()04()a a a a P a a ++-∆==>-+因此11220a a +<,且det 0A >4-3试用lyapunov 第二法确定下列系统原点的稳定性。
(1)1123x x -⎡⎤=⎢⎥-⎣⎦ (2)1111x x -⎡⎤=⎢⎥--⎣⎦解:(1)系统唯一的平衡状态是0e x =。
选取Lyapunov 函数为2212()0V x x x =+>,则112211221222112222122()222(2)2(23)266332()022V x x xx x x x x x x x x x x x x x x ∙=+=-++-=-+-=---<()V x ∙是负定的。
x →∞,有()V x →∞。
即系统在原点处大范围渐近稳定。
(2)系统唯一的平衡状态是0e x =。
选取Lyapunov 函数为2212()0V x x x =+>,则11221122122212()222()2()220V x x xx x x x x x x x x x ∙=+=-++--=--<()V x ∙是负定的。
x →∞,有()V x →∞。
即系统在原点处大范围渐近稳定。
4-6设非线性系统状态方程为:1222221(1),0xx xa x x x a ==-+->试确定平衡状态的稳定性。
解:若采用克拉索夫斯基法,则依题意有:22221()(1)x f x a x x x ⎡⎤=⎢⎥-+-⎣⎦ 22201()()143Tf x J x a ax ax x ⎡⎤∂==⎢⎥----∂⎣⎦取P I =222222222()()()0101143143000286T Q x J x J x a ax ax a ax ax a ax ax -=+-⎡⎤⎡⎤=+⎢⎥⎢⎥-------⎣⎦⎣⎦⎡⎤=⎢⎥---⎣⎦很明显,()Q x 的符号无法确定,故改用李雅普诺夫第二法。
选取Lyapunov函数为2212()0V x x x =+>,则112221221222222()2222((1))2(1)0V x x xx x x x x x a x x a x x ∙=+=+--+=-+<()V x ∙是负定的。
x →∞,有()V x →∞。
即系统在原点处大范围渐近稳定。
4-9设非线性方程:123212xx xx x ==--试用克拉索夫斯基法确定系统原点的稳定性。
解:(1)采用克拉索夫斯基法,依题意有:2312()x f x x x ⎡⎤=⎢⎥--⎣⎦2101()()31T f x J x x x ⎡⎤∂==⎢⎥--∂⎣⎦23232212212312()()()()Tx V x f x f x x x x x x x x x ⎡⎤⎡⎤==--+=+--⎢⎥⎣⎦--⎣⎦x →∞,有()V x →∞。
取P I =21212121()()()01033111013132T Q x J x J x x x x x -=+⎡⎤-⎡⎤=+⎢⎥⎢⎥---⎣⎦⎣⎦⎡⎤-=⎢⎥--⎣⎦则2121013()132x Q x x ⎡⎤-+=⎢⎥-+⎣⎦ ,根据希尔维斯特判据,有: 2221121210310310132x x x -∆=∆==->-+,(),()Q x 的符号无法判断。
(2)李雅普诺夫方法:选取Lyapunov 函数为421233()042V x x x =+>,则 31122331221222()3333()30V x x xx x x x x x x x ∙=+=+--=-<()V x ∙是负定的。
x →∞,有()V x →∞。
即系统在原点处大范围渐近稳定。
4-12试用变量梯度法构造下列系统的李雅普诺夫函数2111222-2-xx x x x x ⎧=+⎨=⎩解:假设()V x 的梯度为:11112212112222a x a x V V a x a x V +∇⎛⎫⎛⎫∇== ⎪ ⎪+∇⎝⎭⎝⎭计算()V x 的导数为:()()2112111122211222222223111122112222121211122()()22T x x x V x V x a x a x a x a x x a x a a x x a x a x x a x x ∙⎛⎫-+=∇=++ ⎪-⎝⎭=--+-++选择参数,试选112212211,0a a a a ====,于是得:12x V x ⎛⎫∇= ⎪⎝⎭,显然满足旋度方程12122121,0V V x xx x x x ∂∇∂∇∂∂===∂∂∂∂即,表明上述选择的参数是允许的。
则有:221212()(12)V x x x x x ∙=---如果121211202x x x x -><或,则()V x ∙是负定的,因此,1212x x <是12x x 和的约束条件。
计算得到()V x 为:12211(0)()11222212()1()2x x x x x V x x dx x dx x x ===+=+⎰⎰()V x 是正定的,因此在121211202x x x x -><即范围内,0e x =是渐进稳定的。