上海大学 现代控制理论 第4章
- 格式:pdf
- 大小:845.37 KB
- 文档页数:36
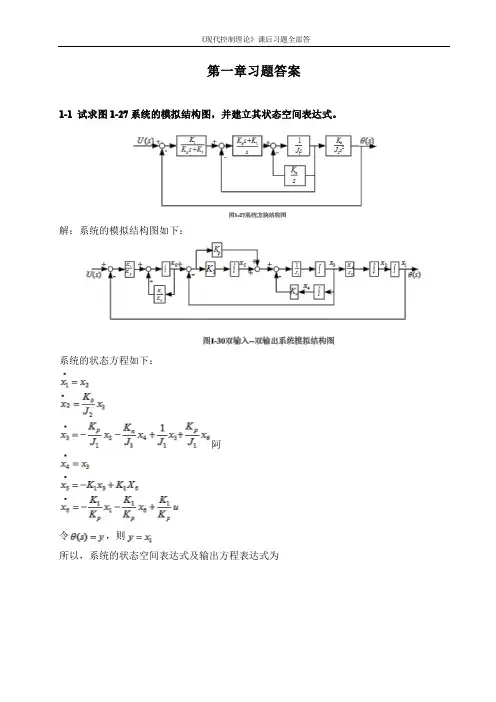
第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。


现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:(1)222123122313()31122Q x x x x x x x x x x =---+-- (2)222123122313()4262v x x x x x x x x x x =++---解:(1)由已知得[]11231231232311232311()31122111113211112x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎡⎤⎢⎥=-+------⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎡⎤⎢⎥--⎡⎤⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥---⎣⎦110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 (2)由已知得[][]112312312323112323()433111143131x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎢⎥=---+---+⎢⎥⎢⎥⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:11122122a a xx a a ⎛⎫= ⎪⎝⎭试确定系统在平衡状态处大范围渐进稳定的条件。
解:方法(1):要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部。
即:111221222112211221221()0a a I A a a a a a a a a λλλλλ---=--=-++-= 有解,且解具有负实部。
即:1122112212210a a a a a a +<>且方法(2):系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-。

III、综合部分第四早线性多变量系统的综合与设计4.1引言前面我们介绍的内容都属于系统的描述与分析。
系统的描述主要解决系统的建模、各种数学模型(时域、频域、内部、外部描述)Z间的相互转换等;系统的分析,则主要研究系统的定量变化规律(如状态方程的解,即系统的运动分析等)和定性行为(如能控性、能观测性、稳定性等)。
而综合与设计问题则与此相反,即在己知系统结构和参数(被控系统数学模型)的基础上,寻求控制规律,以使系统具有某种期望的性能。
一般说来,这种控制规律常取反馈形式,因为无论是在抗干扰性或鲁棒性能方面,反馈闭环系统的性能都远优于非反馈或开环系统。
在本章中,我们将以状态空间描述和状态空间方法为基础,仍然在吋域中讨论线性反馈控制规律的综合与设计方法。
4. 1. 1问题的提法给定系统的状态空间描述若再给定系统的某个期望的性能指标,它既可以是时域或频域的某种特征量(如超调量、过渡过程时间、极、零点),也可以是使某个性能函数取极小或极大。
此时,综合问题就是寻求一个控制作用u,使得在该控制作用下系统满足所给定的期望性能指标。
对于线性状态反馈控制律u = -Kx + r对于线性输岀反馈控制律u = -Ffy + r其中r e R'为参考输入向量。
由此构成的闭环反馈系统分别为x - {A- BK)x+ Br y-Cx或x = {A-BHC)x+Br y = Cx闭坏反馈系统的系统矩阵分别为九=A — BKA H=A-BHC即工K = (A—BK,B,C)或工〃=(A—BHC,B,C)°闭环传递函数矩阵G K⑶=C '[si-(A-BK)Y] BG H G) = C_,[si-(A-BHOf B我们在这里将着重指出,作为综合问题,将必须考虑三个方面的因素,即1)抗外部干扰问题;2)抗内部结构与参数的摄动问题,即鲁棒性(Robustness)问题;3)控制规律的工程实现问题。
一般说来,综合和设计是两个有区别的概念。