现代控制理论习题解答(第四章)
- 格式:docx
- 大小:117.47 KB
- 文档页数:18
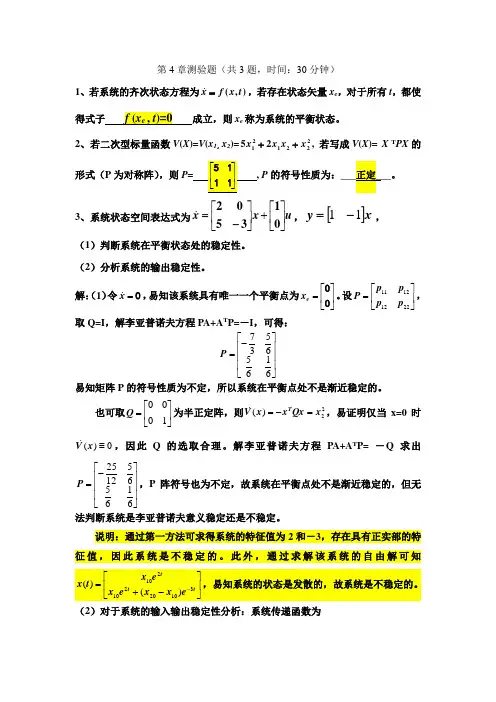
第4章测验题(共3题,时间:30分钟)1、若系统的齐次状态方程为),(t x f x= ,若存在状态矢量x e ,对于所有t ,都使x e 称为系统的平衡状态。
2、若二次型标量函数V (X )=V (x 1,x 2)=22212125x x x x ++, 若写成V (X )= X T PX 的形式(P 为对称阵),则PP 的符号性质为:。
3、系统状态空间表达式为u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=013502 ,[]x y 11-=, (1)判断系统在平衡状态处的稳定性。
(2)分析系统的输出稳定性。
解:(1)令0=x ,易知该系统具有唯一一个平衡点为⎥⎦⎤⎢⎣⎡=00e x 。
设⎥⎦⎤⎢⎣⎡=22121211p p p p P ,取Q=I ,解李亚普诺夫方程PA+A T P=-I ,可得:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=61656537P 易知矩阵P 的符号性质为不定,所以系统在平衡点处不是渐近稳定的。
也可取⎥⎦⎤⎢⎣⎡=1000Q 为半正定阵,则22)(x Qx x x V T =-= ,易证明仅当x=0时0)(≡x V,因此Q 的选取合理。
解李亚普诺夫方程PA+A T P= -Q 求出⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=6165651225P ,P 阵符号也为不定,故系统在平衡点处不是渐近稳定的,但无法判断系统是李亚普诺夫意义稳定还是不稳定。
说明:通过第一方法可求得系统的特征值为2和-3,存在具有正实部的特征值,因此系统是不稳定的。
此外,通过求解该系统的自由解可知⎥⎦⎤⎢⎣⎡-+=-t t te x x e x e x t x 31020210210)()(,易知系统的状态是发散的,故系统是不稳定的。
(2)对于系统的输入输出稳定性分析:系统传递函数为31)3)(2()2()()(1+=+--=-=-s s s s B A sI C s G , 唯一极点为-3,位于s 平面左半平面,因此系统为输出稳定。

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b aa 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。

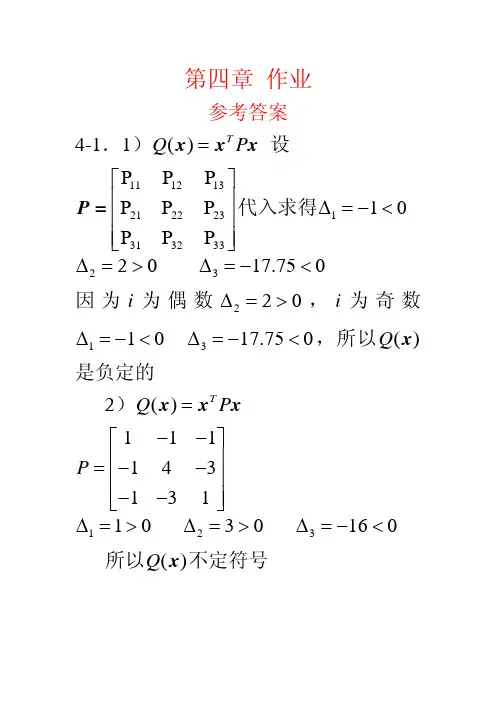
现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:(1)222123122313()31122Q x x x x x x x x x x =---+-- (2)222123122313()4262v x x x x x x x x x x =++---解:(1)由已知得[]11231231232311232311()31122111113211112x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎡⎤⎢⎥=-+------⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎡⎤⎢⎥--⎡⎤⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥---⎣⎦110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 (2)由已知得[][]112312312323112323()433111143131x Q x x x x x x x x x x x x x x x x x x ⎡⎤⎢⎥=---+---+⎢⎥⎢⎥⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:11122122a a xx a a ⎛⎫= ⎪⎝⎭试确定系统在平衡状态处大范围渐进稳定的条件。
解:方法(1):要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部。
即:111221222112211221221()0a a I A a a a a a a a a λλλλλ---=--=-++-= 有解,且解具有负实部。
即:1122112212210a a a a a a +<>且方法(2):系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-。
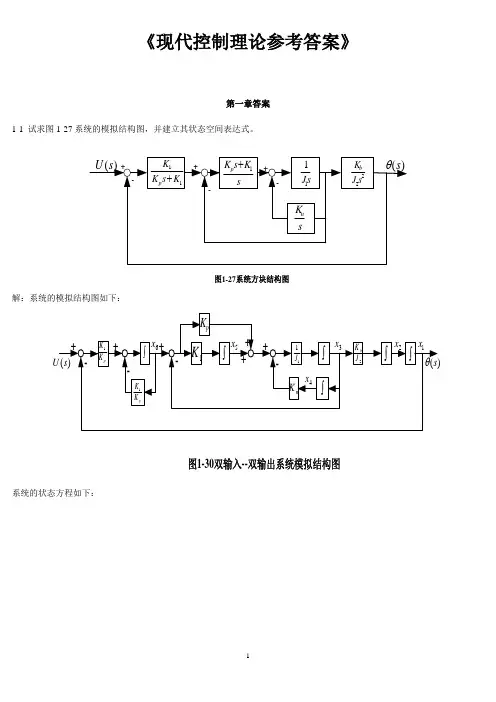
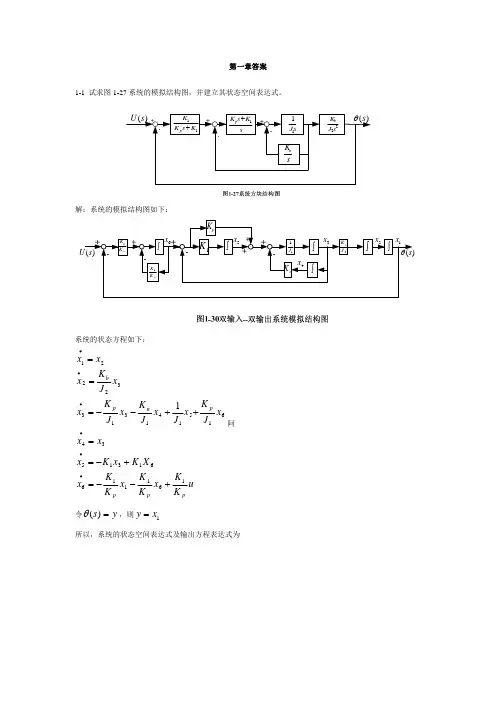
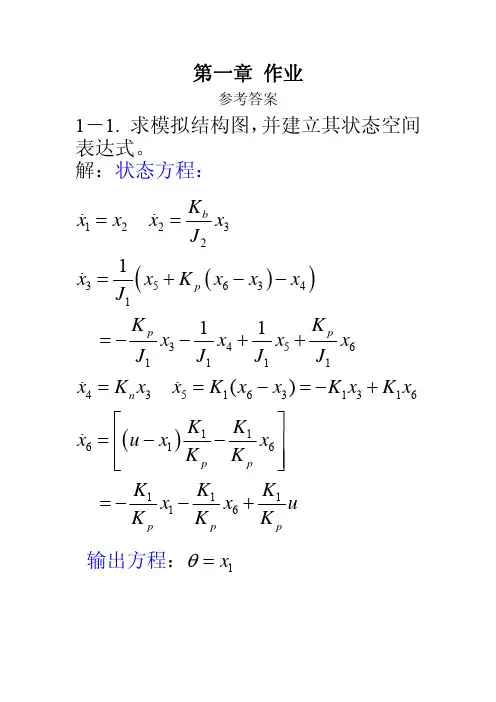
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
第四章习题参考答案4-1(1)211P 130101-⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦,,123212061506132013-∆=>∆==-=>∆=--=>-∴V(x)为正定的(2)841P 421111-⎡⎤⎢⎥=--⎢⎥⎢⎥-⎣⎦,,12380020∆=>∆=∆-<∴V(x)为不定的4-2 ∵12x x 0==,∴e x 是系统的唯一平衡状态()3112211V x 4x x 2x x 42=⋅⋅+⋅⋅⋅ 31122x x x x =⋅+⋅ 22x =- 半负定 ∴系统在原点处的平衡状态是稳定的 ∴()421211V x x x 42=+可成为系统的李氏函数。
4-3(1)1122xx 21xx 04--⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦ ,1212xx 0x 0x 0==⇒== ∴e x 是系统的平衡状态 设李氏函数为()T V x x Px =,TA P PA I +=-1112111212221222P P P P 202110P P P P 140401----⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 得11424P 1132496⎡⎤-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦,()2121113100449624∆=>∆=⋅-> ∴P 是正定的,系统在原点处的平衡状态是渐进稳定的。
李氏函数为()T221253V x x Px x x 2432==+用李氏第一方法校核,21221I A 67303004λλλλλλλ+-==++⇒=-+<=-+ ∴系统在原点处的平衡状态是渐进稳定的(2)112233x200x x 010x x 101x -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦设李氏函数为()T V x x Px =,T A P PA I +=-111213111213122223122223132333132333201P P P P P P 200100010P P P P P P 010010001P P P P P P 101001---⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⇒-+-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦∴110361P 00211062⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,,1235110003672∆=>∆=>∆=>∴P 阵是正定阵,系统在原点处的平衡状态是渐进稳定的。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,如此1x y =所以,系统的状态空间表达式与输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得2221332222213*********1x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由如下微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,如此有 相应的模拟结构图如下: 1-6 〔2〕系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定如下状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:〔2〕⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求如下矩阵的特征矢量〔3〕⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 〔或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 〕 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P〔或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P 〕 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将如下状态空间表达式化成约旦标准型〔并联分解〕〔2〕⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:〔1〕串联联结 〔2〕并联联结1-11 〔第3版教材〕如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11〔第2版教材〕 如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为〔1〕⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以⎥⎦⎤⎢⎣⎡-=1011T所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P 二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b a a 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
第4章“线性系统的能控性与能观性”习题与解答4.1 判断下列系统的能控性。
1) u x x x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡10 01112121 2) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321111001342100010u u x x x x xx3) ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡21321321020011 10030013u u x x x x xx解:1) 由于该系统控制矩阵⎥⎦⎤⎢⎣⎡=01b ,系统矩阵⎥⎦⎤⎢⎣⎡=0111A ,所以 ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=1101 0111Ab 从而系统的能控性矩阵为[]⎥⎦⎤⎢⎣⎡==1011Ab bU C 显然有[]n Ab bU C ===2rank rank满足能控性的充要条件,所以该系统能控。
2)由于该系统控制矩阵为100111B ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=342100010A 则有,0101001001 01112431117AB ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-----⎣⎦⎣⎦⎣⎦ 20100111001 111724317115A B -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦⎣⎦从而系统的能控性矩阵为21001110111171117115C U BABA B -⎡⎤⎢⎥⎡⎤==--⎣⎦⎢⎥⎢⎥--⎣⎦有n U C ==3rank满足能控性的充要条件,所以该系统能控。
3)由于该系统控制矩阵为110020B -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=10030013A 则有,3101133030 00000012020AB ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ 23103399030 0000012020A B ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦于是,系统的能控性矩阵为21133990000002220C U BABA B ---⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦可知n U C <=2rank不满足能控性的充要条件,所以该系统不完全能控。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
1v(x) a 1x 12 b 1x 22 c 1 x 322x 1x 2 4x 3 x 2 2X 1X 3a 1 x T 11 b 1 2(1) v(x) x 12 4x 22 x 32 2x 1x 2 6x 3x 2 2x 1x 3 (2) v(x)x 12 10x 22 4x 32 6x 1 x 2 2x 3x 2222(3) v(x) 10x 14x 2 x 3 2x 1x 2 2x 3x 2 4x 1 x 3【解】:(1)二次型函数不定。
⑵二次型函数为负定。
⑶二次型函数正定。
3-4-2试确定下列二次型为正定时,待定常数的取值范围。
【解】:3-4-1第四章控制系统的稳定性试确定下列二次型是否正定。
1 1 11 11 1 114 3 ,1 0,3 0, 14 31 1 11 413 11 131P4100, 3 100,1010 P 12 1 , 10 1110 1 210 1 39 01411 42 1 10, 17a 1 0a 1b 1 1 a 1b 1c 1 4 b 1 4a 1 c 1【解】:(1)设2 2 v(x) 0.5x 10.5X 2V (X ) X 1X 1 X 2X 2 X 1X 2 X 1X 2 X2x/ °" °)为半负定。
0 (x 0)又因为v(x) 0时,有X 2 0, 则X 2 0,代入状态方程得: X 1 0. 所以系统在X 0时,v(x)不恒为零。
则系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。
(2)设2 2v(x) 0.5X 1 0.5X 2v(x) X 1X 1 X 2X 2 X 1 ( X 1X 2) X 2(2X 1 3X 2)X 12 3X 22 3X 1X 2T 11.51 11 1.5Xx1 0,1.5 31 1 11.53T …X PxP 负定,系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。
(3)0 1 1 1(1) XX(2) xX ; 1 1 2 31 11 0(3) xX (4) xX 1 10 13-4-3满足正定的条件为:a i | of 1 1b ia i 0, 1 11 1 b 12 02 C 1试用李亚普诺夫第二法判断下列线性系统的稳定性。
2 2v(x) 0.5x i 0.5x 2v(x) X i X t x 2x 2 X, X t x 2) x 2( X t x 2)x T PxP 负定,系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。
(4)两个状态变量相互独立,所以可以单独分析各变量的稳定性。
3-4-4试确定下列系统平衡状态的稳定性。
1 3 0x(k 1)3 2 3 x(k)1【解】:方法一: 采用第一方法,确定特征多项式对应的特征值是否在单位圆内。
z i 3f(z) zI A 3 z 2 3i 0 zz i 0.ii73+2.6974i z 2 0.1173-2.6974i Z 31.2346特征多项式对应的特征值均在单位圆外,所以系统不稳定。
方法二: 采用第二方法,1 3 0 G 32 3。
12 2X i X 22X i X i v(X i ) 0.5x i2X 2 X 2 V (X 2)0.5X 2所以系统不稳定。
2 0 XV(X i )X i X i X i0 X 020 X 0 V (X 2) X 2X 2X 2X 01 0.5 0.5 P 0.51 0 0.51v(k) x T (k)(G T PG P)x( k)3 1 1 0.5 0.5 13 0 0.5 0 184.5 7 4.561.5 71.58v(k)为正定,所以系统在原点不稳定。
定时k 值范围。
【解】:方法采用第一方法,确定特征多项式对应的特征值是否在单位圆内。
z1 0f (z) zI A 0 z 10 0k/2z84.5 784.527.75 04.561.5 4.5 67 1.5 8因为8>0,4.5 0,所以P 正定。
10.5 0.51 0.50.75 00.51 0 0.510.510 ,所以P 正定。
v(x) x TPx 正定。
G T PG P 32 0 0.5 1 0 3-4-5因为1>0,0.5乙0.51 2kz2-0.5 2kZ3 00.5 2k 1 0 k 2时平衡点渐近稳定。
方法二:v(x) x T Px 正定。
v(k) x T(k)(G T PG P)x( k)v(k) x T (k)Qx(k)Q I1212 4 k2223R巳巳123RRR1231.^1.^1pp1ok-21111ppGpGP为正定,则124 k2120 k 2时系统渐近稳定。
3-4-6设系统的状态方程为X 10 1X 1,试求这个系统的李亚普诺夫函数, x 2 21.5 x 2然后再求从封闭曲线 v(x) 100边界上的一点到封闭曲线 v(x) 0.05内一点的响应时间上限。
【解】: 令Q IA T PPA I求矩阵P ,即2 P 1 P|2 P 11 P 12 0 1 1 0 11.5 P 21P 22P 21 P 2221.50 15.5所以李氏函数为:2 2v(x)(X 1 x 2 )1 1QP 1I P 1 I 03-4-7 试确定下列非线性系统在原点处的稳定性。
【解】:(1 )采用非线性系统线性化的方法,在平衡点原点处线性化得:I P 012.3062,20.6938t t 。
1ln V(X ,t) 1 , 0.05 In min V(X 0, t o )2 10010.955v(x)5.5 2X 1 42 0.5x 1x 2 0.5x 22s 22s 2系统的两个特征值均在右半平面,则系统在平衡点附近不稳定。
(2 )采用非线性系统线性化的方法,在平衡点原点处线性化得:3-4-8试确定下列非线性系统在原点处稳定时的参数a 、b 的取值范围(其中二者均大于或等于零,但二者不同时为零)。
X 1 X 2 x 2x 1 ax 2 bx 23【解]:f 1 f 1Afx 0X 1 X 2 0 10 1 T Xf 2 f 21a 3bX 22x 01aX 1X 2x 01 1s 1 2siA 1 sas as 1结论:系统在原点渐近稳定的充要条件是 a 大于0, b 任意(同时还需满足题目要求)。
[解]:求平衡点:f 1 X 1 X 2 1 3X 12 11 1 T xxf 2 f 2113X 22 x 01 1X 1X 2x 011Asif 1f 1X 1 X 2 2 21 3x 1 x2 1 2x 1 x 2 f 2 f 22 21 2X 1X 21 X 1 3X2 x 0X 1X 2 x0s 1 As 1 1 1s 1s 2 2s 2 03-4-9试证明系统x 1 x 2x 2a 1x 1a 2x 12x 2在a 10,a ? 0时是全局渐近稳定的。
Ax系统的两个特征值都在左半平面,则系统在平衡点附近渐近稳定。
X i X 2x 2 0a i x i2 a 2X i X 2X ie0 0X 2e设v(x) 20.5a i X i20.5X 2v(x) a 1x 1 x 1 x 2x 2 a 1x 1x 2 x 2( a ^x 2 a 2x 12x 2)22v(x)a 2X i X2结论a i 0, v(x)正定;a 2 0, v(x)负定,系统渐近稳定。
因为时,v(x) 0.5a i X i 2 0.5X 22,所以系统又是大范围渐近稳定。
3-4-10 试用克拉索夫斯基法确定非线性系统在原点X e 0处为大范围渐近稳定时,参数a 和b 的取值范围。
[解]:v(x) f T (x)f(x)大范围渐近稳定的条件是:x 时 v(x)X Tf if i X i X 2 ai f 2 f 2 ii 3bx 22X i X 2v(x)f T (X)[J T J]f(x)2f T (x)i3bx 22 f(x)系统在x e0处渐近稳定的条件是v(x)负定。
而v(x)负定的条件为:a a 0,ii i 3bx 222a 3abx 2 i 0而 ||x | 时,v(x) (ax i X 2 )2 (x i X 2 bx 2 )2所以系统大范围渐近稳定的条件是:a 0,a i 2ii 3bX 2a 3abx 22 i 03-4-11试用变量-梯度法构成下述非线性系统的李氏函数。
x i x i 2x 1 x 2 x 2x 2【解】:求平衡点:X i X 22x 1 2x 1 x 2 x 20 X ieX 2e 0设Va ii X i a i2 X 2V ia 2i X i a 22X 2 V 2v(x)(V)T x2 a ii X i(a 12 a 21 )x 1x 22a 11x 13 x 2 2 2 22a 〔2 x 〔X 2 a 22 x 2若选a iia 221, a i2 V ia 21 0a 12V 22a 21 0X 2X i满足旋度方程条件v(x) xj(1 2X 1X 2) X 22。
当 x 1 x 20.5时,v(x)负定X i (X 2 0)X 2(x i X i )22 、 宀而 v(x)x i dx i x 2dx 2 0.5(x f x ;)为正定。
0 0当X i X 2 0.5时,系统在平衡点渐近稳定。
3-4-I2设非线性系统方程为试求系统原点X e 0稳定的充分条件。
【解】:由第一法,稳定条件为:由克拉索夫斯基法设f i f2 f2A f T X0XX i X i X2f3X2 X 0f i f20,f3X i X i X2v(X) T X X为正定。
TXv(x) Fxf lX i X i3-4-132(X iX2X1)f2X2X2X22上X2l iX if2X2f2X if3X2f i f2X i X if if2)X if3(-f2X i X2 X2f i f2X i X if i f2)X if3(-f2X i X2 X2时渐近稳定。
4(时稳定。
4()2)2试用阿依捷尔曼法分析下列非线性系统在原点X e 0处的稳定性。
结构如题3-4-13图所示。
(1)题3-4-13图【解】:当输入为零时,非线性系统方程可以写成e e F (e) 0若取状态变量:X 1 e, X 2 e ,那么系统的状态方程为:x 1 x 2 X 2 X 2 F (e)(1)在x e 0处将非,线性环节输入-输出特性用一直线近似 则线性化状态方程为:X 1 X 2⑵取二次型函数作为系统的李氏函数,则有(k 1)2时v(x)为负定,从而求得 0.382只要非线性环节的曲线在 0.382e 和2.618e 范围内变化,原非线性控制系统就是大范围渐近稳定的。