运动路线
- 格式:ppt
- 大小:1.22 MB
- 文档页数:10

中考数学重点难点专题练习-第12讲运动路径长度问题想要对运动路径长度问题掌握得信手拈来,那么建议你对以下知识点进行提前学习会更好:1.《隐圆模型》2.《共顶点模型》-也可称“手拉手模型”3.《主从联动模型》-也可称“瓜豆原理模型”4.《旋转问题》—本系列的第二讲中所阐述的旋转相似模型此外,还需要明白的动点类型还有:5.线段垂直平分线——到线段两端点距离相等的动点一定在这条线段的垂直平分线上6.角平分线——到角两边距离相等的动点一定在这个角的角平分线上7.三角形中位线——动点到某条线的距离恒等于某平行线段的一半8.平行线分线段成比例——动点到某条线的距离与某平行线段成比例9.两平行线的性质——平行线间的距离,处处相等Ps强烈建议:如果您之前没有对上述模型进行过学习,建议您先到学科网搜索下载独家精品出版的:《中考数学几何模型能力提升篇》专题系列资料包,您一定可以大有提升!一、路径为圆弧型解题策略:①作出隐圆,找到圆心②作出半径,求出定长解题关键:通过《隐圆模型》中五种确定隐圆的基本条件作出隐圆,即可轻易得出结论.二、路径为直线型解题策略:①利用平行定距法或者角度固定法确定动点运动路径为直线型②确定动点的起点与终点,计算出路径长度即可解题关键:解题过程中常常出现中位线,平行线分线段成比例,相似证动角恒等于顶角等知识点三、路径为往返型解题策略:①通常为《主从联动模型》的衍生版②确定动点的起点与终点,感知运动过程中的变化③找出动点运动的最远点解题关键:解题过程中常常出现相似转线段长、《主从联动模型》中的滑动模型等【例题1】如图,等腰Rt△AOB中,∠AOB=90°,OA=,⊙O与AB相切,分别交OA、OB于N、M,以PB为直角边作等腰Rt△BPQ,点P在弧MN上由点M运动到点N,则点Q运动的路径长为()A.B.C.D.【例题2】已知⊙O,AB是直径,AB=4,弦CD⊥AB且过OB的中点,P是劣弧BC上一动点,DF垂直AP于F,则P从C运动到B的过程中,F运动的路径长度()A.πB.C.πD.2【例题3】如图,⊙O的半径为1,弦AB=1,点P为优弧AB上一动点,AC⊥AP交直线PB于点C,则△ABC的最大面积是.【例题4】如图,等腰Rt△ABC中,斜边AB的长为2,O为AB的中点,P为AC边上的动点,OQ⊥OP 交BC于点Q,M为PQ的中点,当点P从点A运动到点C时,点M所经过的路线长为()A. B. C. 1 D. 2【例题5】已知:如图1,平面直角坐标系中,点A的坐标是(0,6),点B在x轴上,且∠BAO=30°,点D是线段OA上的一点,以BD为边向下作等边△BDE.(1)如图2,当∠ODB=45°时,求证:OE平分∠BED.(2)如图3,当点E落在y轴上时,求出点E的坐标.(3)利用图1探究并说理:点D在y轴上从点A向点O滑动的过程中,点E也会在一条直线上滑动;并直接写出点E运动路径的长度.【例题6】如图,Rt△ABC中,BC=4,AC=8,Rt△ABC的斜边在x轴的正半轴上,点A与原点重合,随着顶点A由O点出发沿y轴的正半轴方向滑动,点B也沿着x轴向点O滑动,直到与点O重合时运动结束.在这个运动过程中,点C运动的路径长是.【例题7】如图1,已知抛物线y=x2+bx+c经过原点O,它的对称轴是直线x=2,动点P从抛物线的顶点A 出发,在对称轴上以每秒1个单位的速度向上运动,设动点P运动的时间为t杪,连结OP并延长交抛物线于点B,连结OA,AB.(1)求抛物线的函数解析式;(2)当△AOB为直角三角形时,求t的值;(3)如图2,⊙M为△AOB的外接圆,在点P的运动过程中,点M也随之运动变化,请你探究:在1≤t≤5时,求点M经过的路径长度.【例题8】如图,OM⊥ON,A、B分别为射线OM、ON上两个动点,且OA+OB=5,P为AB的中点.当B由点O向右移动时,点P移动的路径长为()A.2 B.2C.D.5【例题9】如图1,在Rt△ABC中,∠C=90°,AC=6,BC=8,动点P从点A开始沿边AC向点C以1个单位长度的速度运动,动点Q从点C开始沿边CB向点B以每秒2个单位长度的速度运动,过点P作PD∥BC,交AB于点D,连接PQ分别从点A、C同时出发,当其中一点到达端点时,另一点也随之停止运动,设运动时间为t秒(t≥0),在整个运动过程中,求出线段PQ中点M所经过的路径长.【例题10】(1)如图1,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作等边△BDE,当点D由点A运动到点C时,求点E运动的路径长;(2)如图2,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以E为直角顶点的等腰Rt△BDE,当点D由点A运动到点C时,求点E运动的路径长;(3)如图3,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以D为直角顶点的等腰Rt△BDE,当点D由点A运动到点C时,求点E运动的路径长;(4)如图4,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以D为直顶点的等腰△BDE,且∠BDE=120°,当点D由点A运动到点C时,求点E运动的路径长;【例题11】如图,已知扇形AOB中,OA=3,∠AOB=120°,C是在上的动点.以BC为边作正方形BCDE,当点C从点A移动至点B时,点D经过的路径长是________.1.如图,在等腰Rt△ABC中,AC=BC=,点P在以斜边AB为直径的半圆上,M为PC的中点,当点P沿半圆从点A运动至点B时,点M运动的路径长是.2.已知线段AB=8,C、D是AB上两点,且AC=2,BD=4,P是线段CD上一动点,在AB同侧分别作等腰三角形APE和等腰三角形PBF,M为线段EF的中点,若∠AEP=∠BFP,则当点P由点C移动到点D时,点M移动的路径长度为.3.已知线段AB=10,P是线段AB上一动点,在AB同侧分别作等边三角形APE和等边三角形PBF,G为线段EF的中点,点P由点A移动到点B时,G点移动的路径长度为.4.如图,AB为⊙O的直径,AB=3,弧AC的度数是60°,P为弧BC上一动点,延长AP到点Q,使AP•AQ =AB2.若点P由B运动到C,则点Q运动的路径长为.5.如图,矩形ABCD中,AB=4,AD=6,点E在边AD上,且AE:ED=1:2.动点P 从点A出发,沿AB 运动到点B停止.过点E作EF⊥PE交射线BC于点F.设点M是线段EF的中点,则在点P运动的整个过程中,点M的运动路径长为________.6.等边三角形ABC的边长为2,在AC,BC边上各有一个动点E,F,满足AE=CF,连接AF,BE相交于点P.(1)∠APB的度数;(2)当E从点A运动到点C时,试求点P经过的路径长;(3)连结CP,直接写出CP长度的最小值.7.如图,AB为半圆O的直径,AB=2,C,D为半圆上两个动点(D在C右侧),且满足∠COD=60°,连结AD,BC相交于点P若点C从A出发按顺时针方向运动,当点D与B重合时运动停止,则点P所经过的路径长为________.8.如图,A(﹣3,0),B(0,3),C(﹣1,4),P,C,M按逆时针顺序排列,动点P在线段AB上,∠C=90°,∠CPM=30°,请求出当P点从A运动到B点时,点M运动的路径时什么?并求出M点运动路径长度.9.如图,矩形ABCD中,AB=6,BC=6,动点P从点A出发,以每秒个单位长度的速度沿线段AD 运动,动点Q从点D出发,以每秒2个单位长度的速度沿折线段D﹣O﹣C运动,已知P、Q同时开始移动,当动点P到达D点时,P、Q同时停止运动.设运动时间为t秒.(1)当t=1秒时,求动点P、Q之间的距离;(2)若动点P、Q之间的距离为4个单位长度,求t的值;(3)若线段PQ的中点为M,在整个运动过程中;直接写出点M运动路径的长度为.10.(2019秋•江岸区校级月考)如图,正△ABC中,AB=2,AD⊥BC于D,P,Q分别是AB,BC上的动点,且PQ=AD,点M在PQ的右上方且PM=QM,∠M=120°,当P从点A运动到点B时,M运动的路径长为.(看成固定三角板滑动处理/或反其道而行之)11.如图,在四边形ABCD中,∠C=60°,∠A=30°,CD=BC.(1)求∠B+∠D的度数.(2)连接AC,探究AD,AB,AC三者之间的数量关系,并说明理由.(3)若BC=2,点E在四边形ABCD内部运动,且满足DE2=CE2+BE2,求点E运动路径的长度.12.已知在扇形AOB中,圆心角∠AOB=120°,半径OA=OB=8.(1)如图1,过点O作OE⊥OB,交弧AB于点E,再过点E作EF⊥OA于点F,则FO的长是,∠FEO=°;(2)如图2,设点P为弧AB上的动点,过点P作PM⊥OA于点M,PN⊥OB于点N,点M,N分别在半径OA,OB上,连接MN,则①求点P运动的路径长是多少?②MN的长度是否是定值?如果是,请求出这个定值;若不是,请说明理由;(3)在(2)中的条件下,若点D是△PMN的外心,直接写出点D运动的路经长.13.如图,AB为⊙O的直径,且AB=4,点C在半圆上,OC⊥AB,垂足为点O,P为半圆上任意一点,过P点作PE⊥OC于点E,设△OPE的内心为M,连接OM、PM.(1)求∠OMP的度数;(2)当点P在半圆上从点B运动到点A时,求内心M所经过的路径长.14.(2019•兴化市模拟)正方形ABCD的边长为4,P为BC边上的动点,连接AP,作PQ⊥P A交CD边于点Q.当点P从B运动到C时,线段AQ的中点M所经过的路径长()A.2 B.1 C.4 D.15.(2019•武汉模拟)如图,半径为2cm,圆心角为90°的扇形OAB的弧AB上有一运动的点P,从点P 向半径OA引垂线PH交OA于点H.设△OPH的内心为I,当点P在弧AB上从点A运动到点B时,内心I所经过的路径长为()A.πB.πC.πD.π16.如图,BC是⊙O的直径,BC=4,M、N是半圆上不与B、C重合的两点,且∠MON=120°,△ABC的内心为E点,当点A在上从点M运动到点N时,点E运动的路径长是()A.B.C.D.17.(2020•河北模拟)如图,在正方形ABCD中,AB=1,P是边BC上的一个动点,由点B开始运动,运动到C停止.连接AP,以AP为直角边向右侧作等腰直角三角形,另一个顶点为Q.则点P从B运动到C的过程中,点Q的运动路径长为()A.πB.C.D.118.无论a取什么实数,点P(a﹣1,2a﹣3)都在直线l上.Q(m,n)是直线l上的点,则(2m﹣n+3)2的值等于.19.如图,已知点C是以AB为直径的半圆的中点,D为弧AC上任意一点,过点C作CE⊥BD于点E,连接AE,若AB=4,则AE的最小值为.20.如图,正方形OABC的边长为2,以O为圆心,EF为直径的半圆经过点A,连接AE,CF相交于点P,将正方形OABC从OA与OF重合的位置开始,绕着点O逆时针旋转90°,交点P运动的路径长是.21.如图,在平面直角坐标系中,点A(8,0),点P(0,m),将线段P A绕着点P逆时针旋转90°,得到线段PB,连接AB,OB,则BO+BA的最小值为.22.如图,P为边长为2的正方形ABCD的边BC上一动点,将线段DP绕P逆时针旋转90°得到线段PE (E为D的对应点),M为线段PE的中点,当点P从点C运动到点B的过程中,点M的运动路径长为____________.23.等边△ABC的边长为18,在AC,BC边上各取一点D,E,连接AE,BD相交于点P,若AE=BD,当D从点A运动到点C时,点P所经过的路径长为.24.(2020•武汉模拟)如图,定直线l经过圆心O,P是半径OA上一动点,AC⊥l于点C,当半径OA绕着点O旋转时,总有OP=OC,若OA绕点O旋转60°时,P、A两点的运动路径长的比值是.25.如图,已知正方形ABCD的边长为4,点P是AB边上一个动点,连接CP,过点P作PC的垂线交AD 于点E,以PE为边作正方形PEFG,顶点G在线段PC上,对角线EG、PF相交于点O.(1)若AP=1,则AE=;(2)①求证:点O一定在△APE的外接圆上;②当点P从点A运动到点B时,点O也随之运动,求点O经过的路径长;(3)在点P从点A到点B的运动过程中,△APE的外接圆的圆心也随之运动,求该圆心到AB边的距离的最大值.26.如图,正方形ABCD的边长为2,动点E从点A出发,沿边AB﹣BC向终点C运动,以DE为边作正方形DEFG(点D、E、F、G按顺时针方向排列).设点E运动速度为每秒1个单位,运动的时间为x秒.(1)如图1,当点E在AB上时,求证:点G在直线BC上;(2)设正方形ABCD与正方形DEFG重叠部分的面积为S,求S与x之间的函数关系式;(3)直接写出整个运动过程中,点F经过的路径长.想要对运动路径长度问题掌握得信手拈来,那么建议你对以下知识点进行提前学习会更好:10.《隐圆模型》11.《共顶点模型》-也可称“手拉手模型”12.《主从联动模型》-也可称“瓜豆原理模型”13.《旋转问题》—本系列的第二讲中所阐述的旋转相似模型此外,还需要明白的动点类型还有:14.线段垂直平分线——到线段两端点距离相等的动点一定在这条线段的垂直平分线上15.角平分线——到角两边距离相等的动点一定在这个角的角平分线上16.三角形中位线——动点到某条线的距离恒等于某平行线段的一半17.平行线分线段成比例——动点到某条线的距离与某平行线段成比例18.两平行线的性质——平行线间的距离,处处相等Ps强烈建议:如果您之前没有对上述模型进行过学习,建议您先到学科网搜索下载独家精品出版的:《中考数学几何模型能力提升篇》专题系列资料包,您一定可以大有提升!一、路径为圆弧型解题策略:①作出隐圆,找到圆心②作出半径,求出定长解题关键:通过《隐圆模型》中五种确定隐圆的基本条件作出隐圆,即可轻易得出结论.二、路径为直线型解题策略:①利用平行定距法或者角度固定法确定动点运动路径为直线型②确定动点的起点与终点,计算出路径长度即可解题关键:解题过程中常常出现中位线,平行线分线段成比例,相似证动角恒等于顶角等知识点三、路径为往返型解题策略:①通常为《主从联动模型》的衍生版②确定动点的起点与终点,感知运动过程中的变化③找出动点运动的最远点解题关键:解题过程中常常出现相似转线段长、《主从联动模型》中的滑动模型等【例题1】如图,等腰Rt△AOB中,∠AOB=90°,OA=,⊙O与AB相切,分别交OA、OB于N、M,以PB为直角边作等腰Rt△BPQ,点P在弧MN上由点M运动到点N,则点Q运动的路径长为()A.B.C.D.【分析】解题标签:《共顶点模型》中的旋转相似、《隐圆模型》中的动点定长模型、《主从联动模型》【解析】如图,连接OP,AQ,设⊙O与AB相切于C,连接OC,则OC⊥AB,∵OA=OB,∠AOB=90°,OB=,∴AB=2,OP=OC=AB=,∵△ABO和△QBP均为等腰直角三角形,∴=,∠ABO=∠QBP=45°,∴=,∠ABQ=∠OBP,∴△ABQ∽△OBP,∴∠BAQ=∠BOP,=,即=,∴AQ=,又∵点P在弧MN上由点M运动到点N,∴0°≤∠BOP≤90°,∴0°≤∠BAQ≤90°,∴点Q的运动轨迹为以A为圆心,AQ长为半径,圆心角为90°的扇形的圆弧,∴点Q运动的路径长为=,故选:D.[本题用《主从联动模型》来接替会更快得到结果]【例题2】已知⊙O,AB是直径,AB=4,弦CD⊥AB且过OB的中点,P是劣弧BC上一动点,DF垂直AP于F,则P从C运动到B的过程中,F运动的路径长度()A.πB.C.πD.2【分析】解题标签:“定边对直角”确定隐圆模型【解析】作DQ⊥AC于Q,如图,当P点在C点时,F点与Q重合;当P点在B点时,F点与E点重合,∵∠AFD=90°,∴点F在以AD为直径的圆上,∴点F运动的路径为,∵弦CD⊥AB且过OB的中点,∴OE=OD,CE=DE=,AC=AC=2,∴∠DOE=60°,∴∠DAC=60°,∴△ACD为等边三角形,∴MQ和ME为中位线,∴MQ=,∠QME=60°,∴F运动的路径长度==.故选:A.【例题3】如图,⊙O的半径为1,弦AB=1,点P为优弧AB上一动点,AC⊥AP交直线PB于点C,则△ABC的最大面积是.【分析】解题标签:“定边对定角”确定隐圆模型【解析】连结OA、OB,作△ABC的外接圆D,如图1,∵OA=OB=1,AB=1,∴△OAB为等边三角形,∴∠AOB=60°,∴∠APB=∠AOB=30°,∵AC⊥AP,∴∠C=60°,∵AB=1,要使△ABC的最大面积,则点C到AB的距离最大,∵∠ACB=60°,点C在⊙D上,∴∠ADB=120°,如图2,当点C优弧AB的中点时,点C到AB的距离最大,此时△ABC为等边三角形,且面积为AB2=,∴△ABC的最大面积为.故答案为:.【例题4】如图,等腰Rt△ABC中,斜边AB的长为2,O为AB的中点,P为AC边上的动点,OQ⊥OP 交BC于点Q,M为PQ的中点,当点P从点A运动到点C时,点M所经过的路线长为()A. B. C. 1 D. 2【分析】解题标签:“线段垂直平分线”产生“平行定距型”【解析】连接OC,作PE⊥AB于E,MH⊥AB于H,QF⊥AB于F,如图,∵△ACB为到等腰直角三角形,∴AC=BC= AB= ,∠A=∠B=45°,∵O为AB的中点,∴OC⊥AB,OC平分∠ACB,OC=OA=OB=1,∴∠OCB=45°,∵∠POQ=90°,∠COA=90°,∴∠AOP=∠COQ,在Rt△AOP和△COQ中,∴Rt△AOP≌△COQ,∴AP=CQ,易得△APE和△BFQ都为等腰直角三角形,∴PE=22AP=22CQ,QF=22BQ,∴PE+QF=22(CQ+BQ)=22BC=2×22=1,∵M点为PQ的中点,∴MH为梯形PEFQ的中位线,∴MH=12(PE+QF)=12,即点M到AB的距离为12,而CO=1,∴点M的运动路线为△ABC的中位线,∴当点P从点A运动到点C时,点M所经过的路线长=12AB=1,故答案为:C.[或连接OM,CM,点M运动路径为线段OC中垂线]【例题5】已知:如图1,平面直角坐标系中,点A的坐标是(0,6),点B在x轴上,且∠BAO=30°,点D是线段OA上的一点,以BD为边向下作等边△BDE.(1)如图2,当∠ODB=45°时,求证:OE平分∠BED.(2)如图3,当点E落在y轴上时,求出点E的坐标.(3)利用图1探究并说理:点D在y轴上从点A向点O滑动的过程中,点E也会在一条直线上滑动;并直接写出点E运动路径的长度.【分析】解题标签:“共顶点模型”、“全等或相似转固定角度法确定动点的直线运动”【解析】(1)∵∠ODB=45°,∠AOB=90°,∴∠OBD=∠ODB=45°,∴OD=OB,∵△BDE是等边三角形,∴DE=BE,在△DOE和△BOE中,,∴△DOE≌△BOE(SSS),∴∠DEO=∠BEO,即OE平分∠BED;(2)∵△BOE是等边三角形,∴∠EDB=60°,∵OB⊥DE,设OD=x,则OE=x,∵∠BAO=30°,∠AOB=90°,∴∠DBO=∠ABD=∠BAO=30°,∴BD=2OD=2x,AD=BD=2x,∵OA=AD+OD=3x=6,解得,x=2,∴E(0,﹣2);(3)如图1,在x轴上取点C,使BC=BA,连接CE,∵∠ABD+∠OBD=∠CBE+∠OBD=60°,∴∠ABD=∠CBE,在△ABD和△CBE中,,∴△ABD≌△CBE(SAS),∴∠BCE=∠BAO=30°,∴当D在OA上滑动时,点E总在与x轴夹角为30°的直线CE上滑动,如图可知,点E运动路径的长度为6.【例题6】如图,Rt△ABC中,BC=4,AC=8,Rt△ABC的斜边在x轴的正半轴上,点A与原点重合,随着顶点A由O点出发沿y轴的正半轴方向滑动,点B也沿着x轴向点O滑动,直到与点O重合时运动结束.在这个运动过程中,点C运动的路径长是8﹣12.【分析】解题标签:“运动路径为来回型”【解析】①当A从O到现在的点A处时,如图2,此时C′A⊥y轴,点C运动的路径长是CC′的长,∴AC′=OC=8,∵AC′∥OB,∴∠AC′O=∠COB,∴cos∠AC′O=cos∠COB==,∴=,∴OC′=4,∴CC′=4﹣8;②当A再继续向上移动,直到点B与O重合时,如图3,此时点C运动的路径是从C′到C,长是CC′,CC′=OC′﹣BC=4﹣4,综上所述,点C运动的路径长是:4﹣8+4﹣4=8﹣12;故答案为:8﹣12.【例题7】如图1,已知抛物线y=x2+bx+c经过原点O,它的对称轴是直线x=2,动点P从抛物线的顶点A 出发,在对称轴上以每秒1个单位的速度向上运动,设动点P运动的时间为t杪,连结OP并延长交抛物线于点B,连结OA,AB.(1)求抛物线的函数解析式;(2)当△AOB为直角三角形时,求t的值;(3)如图2,⊙M为△AOB的外接圆,在点P的运动过程中,点M也随之运动变化,请你探究:在1≤t≤5时,求点M经过的路径长度.【分析】解题标签:“运动路径为来回型”【解析】(1)∵抛物线y=x2+bx+c经过原点O,且对称轴是直线x=2,∴c=0,﹣=2,则b=﹣4、c=0,∴抛物线解析式为y=x2﹣4x;(2)设点B(a,a2﹣4a),∵y=x2﹣4x=(x﹣2)2﹣4,∴点A(2,﹣4),则OA2=22+42=20、OB2=a2+(a2﹣4a)2、AB2=(a﹣2)2+(a2﹣4a+4)2,①若OB2=OA2+AB2,则a2+(a2﹣4a)2=20+(a﹣2)2+(a2﹣4a+4)2,解得a=2(舍)或a=,∴B(,﹣),则直线OB解析式为y=﹣x,当x=2时,y=﹣3,即P(2,﹣3),∴t=(﹣3+4)÷1=1;②若AB2=OA2+OB2,则(a﹣2)2+(a2﹣4a+4)2=20+a2+(a2﹣4a)2,解得a=0(舍)或a=,∴B(,),则直线OB解析式为y=x,当x=2时,y=1,即P(2,1),∴t=[1﹣(﹣4)]÷1=5;③若OA2=AB2+OB2,则20=(a﹣2)2+(a2﹣4a+4)2+a2+(a2﹣4a)2,整理,得:a3﹣8a2+21a﹣18=0,a3﹣3a2﹣5a2+15a+6a﹣18=0,a2(a﹣3)﹣5a(a﹣3)+6(a﹣3)=0,(a﹣3)(a2﹣5a+6)=0,(a﹣3)2(a﹣2)=0,则a=3或a=2(舍),∴B(3,﹣3),∴直线OB解析式为y=﹣x,当x=2时,y=﹣2,即P(2,﹣2),∴t=[﹣2﹣(﹣4)]÷1=2;综上,当△AOB为直角三角形时,t的值为1或2或5.(3)∵⊙M为△AOB的外接圆,∴点M在线段OA的中垂线上,∴当1≤t≤5时,点M的运动路径是在线段OA中垂线上的一条线段,当t=1时,如图1,由(2)知∠OAB=90°,∴此时Rt△OAB的外接圆圆心M是OB的中点,∵B(,﹣),∴M(,﹣);当t=5时,如图2,由(2)知,∠AOB=90°,∴此时Rt△OAB的外接圆圆心M是AB的中点,∵B(,)、A(2,﹣4),∴M(,﹣);当t=2时,如图3,由(2)知,∠OBA=90°,∴此时Rt△OAB的外接圆圆心M是OA的中点,∵A(2,﹣4),∴M(1,﹣2);则点M经过的路径长度为=.【例题8】如图,OM⊥ON,A、B分别为射线OM、ON上两个动点,且OA+OB=5,P为AB的中点.当B由点O向右移动时,点P移动的路径长为()A.2 B.2C.D.5【分析】解题标签:“利用解析法计算几何路径长”【解析】建立如图坐标系.设OB=t,则OA=5﹣t,∴B(t,0),A(0,5﹣t),∵AP=PB,∴P(,),令x=,y=,消去t得到,y=﹣x+(0≤x≤),∴点P的运动轨迹是线段HK,H(0,),K(,0),∴点P的运动路径的长为=,故选:C.【例题9】如图1,在Rt△ABC中,∠C=90°,AC=6,BC=8,动点P从点A开始沿边AC向点C以1个单位长度的速度运动,动点Q从点C开始沿边CB向点B以每秒2个单位长度的速度运动,过点P作PD∥BC,交AB于点D,连接PQ分别从点A、C同时出发,当其中一点到达端点时,另一点也随之停止运动,设运动时间为t秒(t≥0),在整个运动过程中,求出线段PQ中点M所经过的路径长.【分析】解题标签:“利用解析法计算几何路径长”【解析】如图2,以C为原点,以AC所在的直线为x轴,建立平面直角坐标系.依题意,可知0≤t≤4,当t=0时,点M1的坐标为(3,0),当t=4时点M2的坐标为(1,4).设直线M1M2的解析式为y=kx+b,∴,解得,∴直线M1M2的解析式为y=-2x+6.∵点Q(0,2t),P(6-t,0)∴在运动过程中,线段PQ中点M3的坐标(,t).把x= 代入y=-2x+6得y=-2×+6=t,∴点M3在直线M1M2上.过点M2作M2N⊥x轴于点N,则M2N=4,M1N=2.∴M1M2=2∴线段PQ中点M所经过的路径长为2 单位长度.【例题10】(1)如图1,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作等边△BDE,当点D由点A运动到点C时,求点E运动的路径长;(2)如图2,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以E为直角顶点的等腰Rt△BDE,当点D由点A运动到点C时,求点E运动的路径长;(3)如图3,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以D为直角顶点的等腰Rt△BDE,当点D由点A运动到点C时,求点E运动的路径长;(4)如图4,已知AB=2,点D是等腰Rt△ABC斜边AC上一动点,以BD为一边向右下方作以D为直顶点的等腰△BDE,且∠BDE=120°,当点D由点A运动到点C时,求点E运动的路径长;【分析】解题标签:“主从联动模型”【解析】22;2;4;26【例题11】如图,已知扇形AOB中,OA=3,∠AOB=120°,C是在上的动点.以BC为边作正方形BCDE,当点C从点A移动至点B时,点D经过的路径长是________.【分析】解题标签:“定边对定角”确定隐圆模型、主从联动模型【解析】如图所示,易得点D的运动轨迹的长为=2 π.1.如图,在等腰Rt△ABC中,AC=BC=,点P在以斜边AB为直径的半圆上,M为PC的中点,当点P沿半圆从点A运动至点B时,点M运动的路径长是.【解析】如图,连接OP,OC,取OC的中点K,连接MK.∵AC=BC=,∠ACB=90°,∴AB==2,∴OP=AB=1,∵CM=MP,CK=OK,∴MK=OP=,∴当点P沿半圆从点A运动至点B时,点M运动的路径是以K为圆心,长为半径的半圆,∴点M运动的路径长=•2•π•=,故答案为.2.已知线段AB=8,C、D是AB上两点,且AC=2,BD=4,P是线段CD上一动点,在AB同侧分别作等腰三角形APE和等腰三角形PBF,M为线段EF的中点,若∠AEP=∠BFP,则当点P由点C移动到点D时,点M移动的路径长度为4﹣3.【解析】如图,分别延长AE、BF交于点H.∵△APE和△PBF都是等腰三角形,且∠AEP=∠BFP∵∠A=∠FPB,∴AH∥PF,同理,BH∥PE,∴四边形EPFH为平行四边形,∴EF与HP互相平分.∵M为EF的中点,∴M为PH中点,即在P的运动过程中,M始终为PH的中点,所以M的运行轨迹为三角形HCD的中位线QN.∵CD=AB﹣AC﹣BD=8﹣6,∴QN=CD=4﹣3,即M的移动路径长为4﹣3.故答案是:4﹣3.3.已知线段AB=10,P是线段AB上一动点,在AB同侧分别作等边三角形APE和等边三角形PBF,G为线段EF的中点,点P由点A移动到点B时,G点移动的路径长度为5.【解析】如图,分别延长AE、BF交于点H,∵∠A=∠FPB=60°,∴AH∥PF,∵∠B=∠EP A=60°,∴BH∥PE,∴四边形EPFH为平行四边形,∴EF与HP互相平分.∵G为EF的中点,∴G正好为PH中点,即在P的运动过程中,G始终为PH的中点,所以G的运行轨迹为△HAB的中位线MN.∴MN=AB=5,即G的移动路径长为5.故答案为:54.如图,AB为⊙O的直径,AB=3,弧AC的度数是60°,P为弧BC上一动点,延长AP到点Q,使AP•AQ=AB2.若点P由B运动到C,则点Q运动的路径长为3.【解析】连接BQ,如图,∵AB为⊙O的直径,∴∠APB=90°,∵AP•AQ=AB2.即=,而∠BAP=∠QAB,∴△ABP∽△AQB,∴∠ABQ=∠APB=90°,∴BQ为⊙O的切线,点Q运动的路径长为切线长,∵弧AC的度数是60°,∴∠AOC=60°,∴∠OAC=60°,当点P在C点时,∠BAQ=60°,∴BQ=AB=3,即点P由B运动到C,则点Q运动的路径长为3.故答案为3.5.如图,矩形ABCD中,AB=4,AD=6,点E在边AD上,且AE:ED=1:2.动点P 从点A出发,沿AB 运动到点B停止.过点E作EF⊥PE交射线BC于点F.设点M是线段EF的中点,则在点P运动的整个过程中,点M的运动路径长为________.【答案】4【解析】如图所示:过点M作GH⊥AD.∵AD∥CB,GH⊥AD,∴GH⊥BC.在△EGM和△FHM中,∴△EGM≌△FHM.∴MG=MH.∴点M的轨迹是一条平行于BC的线段当点P与A重合时,BF1=AE=2,当点P与点B重合时,∠F2+∠EBF1=90∘,∠BEF1+∠EBF1=90∘,∴∠F2=∠EBF1.∵∠EF1B=∠EF1F2,∴△EF1B∽△∠EF1F2.∴,即∴F1F2=8,∵M1M2是△EF1F2的中位线,∴M1M2= F1F2=4.故答案为:4.6.等边三角形ABC的边长为2,在AC,BC边上各有一个动点E,F,满足AE=CF,连接AF,BE相交于点P.(1)∠APB的度数;(2)当E从点A运动到点C时,试求点P经过的路径长;(3)连结CP,直接写出CP长度的最小值.【解析】(1)∵△ABC为等边三角形,∴AB=AC,∠C=∠CAB=60°,又∵AE=CF,在△ABE和△CAF中,,∴△ABE≌△CAF(SAS),∴AF=BE,∠ABE=∠CAF.又∵∠APE=∠BPF=∠ABP+∠BAP,∴∠APE=∠BAP+∠CAF=60°.∴∠APB=180°﹣∠APE=120°.(2)如图1,∵AE=CF,∴点P的路径是一段弧,由题目不难看出当E为AC的中点的时候,点P经过弧AB的中点,此时△ABP 为等腰三角形,且∠ABP=∠BAP=30°,∴∠AOB=120°,又∵AB=2,∴OA=2,点P的路径是l===;(3)如图2,∵AE=CF,∴点P的路径是一段弧,∴当点E运动到AC的中点时,CP长度的最小,即点P为△ABC的中心,过B作BE′⊥AC于E′,∴PC=BE′,∵△ABC是等边三角形,∴BE′=BC=3,∴PC=2.∴CP长度的最小值是2.方法二:由图1可知,CP最小值等于CO减OA,OA就是那圆弧的半径,可得PC的最小值为2.7.如图,AB为半圆O的直径,AB=2,C,D为半圆上两个动点(D在C右侧),且满足∠COD=60°,连结AD,BC相交于点P若点C从A出发按顺时针方向运动,当点D与B重合时运动停止,则点P所经过的路径长为________.【答案】【解析】解:点C从点A运动到点D与点B从何时,AD与BC的相点P运动的轨迹是一条弧,C,D两点运动到恰好是半圆的三等分点时,AD与BC的相点P是弧的最高点,作AP,BP的中垂线,两线交于点E,点E是弧APB的圆心;由题意知:AD=BD,∠PAB=∠PBA=30°,连接AE,DE,根据圆的对称性得出A、O、E三点在同一直线上,易证△ADE是一个等边三角形,∠AED=60°,在Rt△ADO中,∠DOA=90°,∠PAB=30°,AO=1,故AD=,∴AE=AD=,弧APB的长度==。

户外徒步运动活动流程精选范文5篇徒步旅行这个词语最早是指19世纪60年代在尼泊尔的远足旅行,从那以后徒步旅行就开始在世界各地流行了起来。
下面给大家分享一些关于户外徒步运动活动流程精选范文5篇,希望能够对大家有所帮助。
户外徒步运动活动流程精选范文篇1一、活动主题本次大赛的主题是:“我行走我快乐,健康工作,幸福一生”。
二、比赛时间20___年6月5日早05:45——07:30三、比赛办法以工会小组为单位进行比赛,工会组长为领队。
各工会小组组成徒步健身大赛方队,依次行进。
四、徒步线路一号教学楼——东门——中华西路——和平广场——浏园嫩江大堤——嫩江公园——新明大街——林艺街——东门集合。
全程约6公里,用时约1.5小时,强度中等。
五、奖项设置大赛共设七个奖项最佳组织奖一个:工会小组参赛人数多;最佳风貌奖一个:服装整齐统一;最佳创意奖一个:徒步行进中创意独特;最佳步伐奖一个:步伐整齐划一;最佳状态奖一个:精神饱满形象好;最佳环保奖一个:徒步过程中无吸烟等不文明现象;最具激情奖一个:徒步过程中歌声嘹亮。
六、评比小组由学校领导和工会副主席、体育教研室主任等组成评委会,统一评奖。
七、组织协调徒步健身大赛由校工会牵头,体育教研室协办。
八、工作人员苏新、邓国华、各工会小组长、副组长等。
九、摄影摄像李楷、王红丽、姜瑶。
十、安全保卫何玉相、任来泉、杨博、王啸东。
十一、活动要求1、参加徒步健身大赛活动人员要求穿着运动装及运动鞋。
2、要遵守时间,不得迟到或中途退出比赛。
参加比赛人员务于05:45在一号教学楼前以工会小组为单位集合整队。
3、要全员参加,确因身体或工作等原因不能参加者,要提前告知校工会。
因身体原因不能参加徒步的同志,作为比赛工作人员准时到位,为大赛做好服务工作。
不参加徒步比赛且不能为大赛做服务工作人员不予评奖。
4、各小组领队于5月30日下班前,将参加比赛人员名单报送校工会副主席苏新处(实训楼410室)。
5、要服从安排,严禁单独行动,注意交通安全。
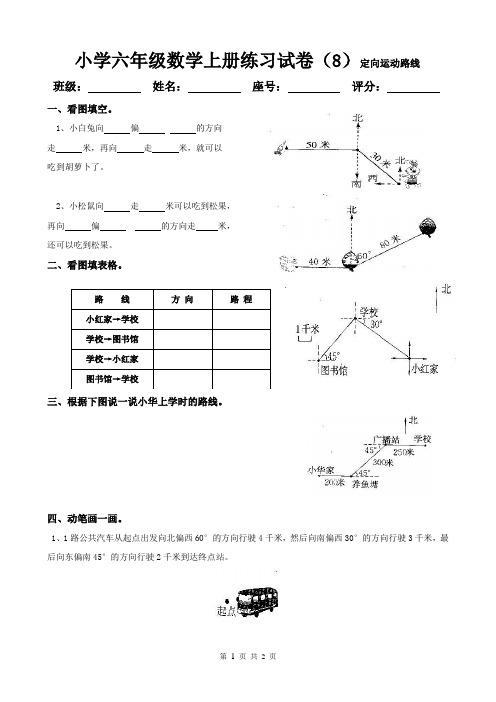
小学六年级数学上册练习试卷(8)定向运动路线 班级: 姓名: 座号: 评分:
一、看图填空。
1、小白兔向 偏 的方向
走 米,再向 走 米,就可以
吃到胡萝卜了。
2、小松鼠向 走 米可以吃到松果,
再向 偏 的方向走 米,
还可以吃到松果。
二、看图填表格。
三、根据下图说一说小华上学时的路线。
四、动笔画一画。
1、1路公共汽车从起点出发向北偏西60°的方向行驶4千米,然后向南偏西30°的方向行驶3千米,最后向东偏南45°的方向行驶2千米到达终点站。
路 线 方 向 路 程 小红家→学校 学校→图书馆 学校→小红家 图书馆→学校
2、根据下面路线图,写出淘气去学校,又去少年宫,再经过百货大楼回到家所走的方向和路程。

最佳的跑步路线推荐跑步是一项简单而又有益的运动,它不仅能够强身健体,还能让我们在繁忙的生活中找到片刻宁静,释放压力。
然而,选择一条合适的跑步路线对于提升跑步体验至关重要。
接下来,我将为大家推荐几条不同类型的最佳跑步路线。
首先,我们来看看城市公园路线。
城市公园通常环境优美,绿树成荫,空气清新。
比如具体公园名称,这里有着宽敞的步道和丰富的自然景观。
从公园的入口开始,沿着湖边的小径慢跑,湖水在阳光的照耀下波光粼粼,微风拂过带来阵阵花香。
沿途还能欣赏到各种各样的花卉和树木,让人心旷神怡。
公园里的地形也较为平坦,适合各种跑步水平的人。
而且,公园内一般设有休息长椅和公共卫生间,方便跑者在需要时休息和调整。
其次,是滨江或滨海路线。
以具体江河或海滨名称为例,沿着江边或海边跑步,一边是广阔的水面,一边是繁华的城市景色,这种视觉上的冲击能给跑步增添不少乐趣。
清新的江风或海风迎面吹来,带走身体的热量,让人感觉格外舒适。
这类路线通常比较开阔,视野良好,能让您在跑步的同时尽情享受大自然的魅力。
不过,需要注意的是,江边或海边的风力可能较大,对于初跑者来说,可能会增加一些难度。
再来介绍一下校园跑步路线。
许多校园拥有大片的绿地和宽敞的道路,比如具体学校名称。
校园里的氛围充满了青春活力,跑步时能感受到浓厚的文化气息。
操场上的塑胶跑道能够提供较好的缓冲,减少对关节的冲击。
而且,校园内相对安全,车辆较少,跑者可以更加专注于跑步。
对于喜欢挑战的跑者,山区或郊外的越野路线是不错的选择。
比如具体山区或郊外名称,这里有起伏的山路、茂密的森林和清澈的溪流。
越野跑可以锻炼跑者的应变能力和体力,同时也能让您亲近大自然,感受大自然的原始魅力。
但需要提醒的是,越野跑具有一定的危险性,跑前一定要做好充分的准备,包括了解路线、携带必要的装备和告知他人您的行程。
如果您住在古城区或者历史文化街区附近,那么这里也能成为独特的跑步路线。
比如具体古城区或历史文化街区名称,古老的建筑、狭窄的街道和独特的文化氛围,会让您仿佛穿越回过去。

运动路径的概念运动路径是指物体在运动过程中所经过的轨迹或路线。
无论是线性运动还是曲线运动,物体总是沿着某个轨迹移动。
运动路径不仅与物体自身的运动特点有关,还与外界环境的限制和作用力有关。
在物理学中,运动路径是研究物体运动的一个重要概念。
根据物体的运动方式和运动轨迹的形状,可以将运动路径分为直线运动和曲线运动两种。
直线运动是指物体在运动过程中沿着一条直线运动的情况。
直线运动是最简单的一种运动方式,常见的例子有物体自由下落、匀速直线运动等。
对于直线运动,物体的位置随时间的变化呈线性关系,可以用直线方程来描述。
运动路径是一条直线,在直线上任意两点之间的距离是固定的。
曲线运动是指物体在运动过程中沿着一条曲线运动的情况。
曲线运动较为复杂,物体的位置随时间的变化不再呈线性关系。
物体在曲线运动过程中,其位置、速度和加速度等物理量都会随时间变化而发生改变。
曲线运动的运动路径可以是圆弧、抛物线、椭圆等形状,取决于物体所受到的作用力和运动轨迹。
运动路径的形状和特点是由物体所受到的作用力决定的。
在自由下落的情况下,物体受到的作用力是重力,运动路径是垂直向下的直线。
在弹簧振子的摆动过程中,物体受到弹簧的弹力和重力的作用力,运动路径是来回摆动的曲线。
在行星围绕太阳运动的过程中,行星受到太阳的引力作用,运动路径是椭圆。
除了受到外力的影响,物体的运动路径还受到外界环境的限制。
在平面运动中,物体受到支撑力、摩擦力等作用,运动路径会受到这些力的影响而有所改变。
例如,游泳选手在水中游动时,受到水的阻力作用,运动路径会受到水流的影响而呈现出曲线。
运动路径的变化还可能受到其他因素的影响,如摆球、抛体等运动过程。
摆球运动是指物体通过绳子或其他支撑物进行来回摆动的运动。
摆球运动的运动路径是曲线,摆球摆动的形状取决于摆球的长度、重力加速度和摆动的幅度。
抛体运动是指物体在受到初速度和重力作用下进行抛射运动的过程。
抛体运动的运动路径是抛物线,其形状取决于初速度、抛射角度和重力加速度。
信阳户外运动路线信阳十大户外经典路线1:公母潭穿越路线在南湾湖上游,座落在信阳董家河乡张家湾境内的峡谷之中,有两潭两瀑名为宫府潭,俗称公母潭,公潭在上母潭在下。
在公潭上有一巨大的石壁就象一厚实的身板,立于山涧。
顺石壁而下,右下方有一深不可测的圆潭,瀑布从上倾泻而下,流进圆潭,溢出后流向山涧,直奔母潭而去,在阳光的照耀下,整个公潭银光闪闪,金碧辉煌,阳刚之美尽在不言中。
母潭与公潭相距500米,两扇高耸的岩石伫立在瀑布两侧犹如她那丰满的胸膛,宽大深厚的潭底,承接着由三、四十米高飞流而下的瀑布,水花四溅,仿佛储存着孕育无穷生命的能量。
阴清湿润的环境,又体现出女性柔美、安详、妩媚的面容。
站在谷口环顾四周,视野之内的崇山峻岭,莽莽丛林皆呈现出一派原始自然的风貌。
在公母潭四周还有鹰嘴石、石狮、石人、石猪、石龟,皆栩栩如生。
整个穿越路线置于峡谷之中,约30公里左右,风光无限,起伏又不太大,所以公母潭被喻为信阳驴队的精典路线出行路线:信阳坐车--董家河--黄龙寺--徒步穿越至张家湾境内--公母潭--沙墩--吴家湾--西河--坐车返回信阳扎营地在沙墩水焐程采稀整个路线中低强度。
2:信阳黑白龙潭穿越攻略黑白龙潭之间群山峻岭那美妙的风光很吸引人,相传过去有人在白龙潭放鹰,鱼鹰入水久不出,后来在黑龙潭发现有鱼鹰浮于水面,因而有两潭相通的传说。
事实上两潭相隔只有几公里,但黑龙潭背靠没人山海拔842.3米,白龙潭背靠猴儿石山海拔也近800米,因而山路险要难走,实走路线约30公里左右,但两山之间群山巍峨,深藏秀水,如同仙境,所以又是驴友们值得一去的好地方。
这条路线两头都可以穿越:1:从黑龙潭穿由信阳出发--信应省道--转到通向负痈巯绱灏赜吐飞希-马家畈村(黑龙潭村)--黑龙潭(一潭和二潭)--左入陈门沟――徒步经东茶山――猴儿石茶山――北进张家湾――烂石爬――麻和尚湾――右拐入白龙潭--白龙潭村--返回信阳。
当然这条线还可以由:。
球的行走路线原理
球的行走路线原理涉及到物理学中的动力学和力学运动原理。
当球被施加一个力时,根据牛顿第二定律,球会加速运动。
球的运动路线取决于施加在球上的力的方向和大小。
1. 直线运动:如果在球上施加的力和球的初始速度方向一致,球将沿直线运动。
如果力的大小恒定,球将保持匀速直线运动。
如果力的大小变化,球的速度将发生变化。
2. 曲线运动:如果在球上施加的力的方向改变,球将发生曲线运动。
例如,当球受到一个斜上方的力时,它将在空中形成一个抛物线的轨迹。
曲线运动的形状和球受力的大小和方向有关。
3. 旋转运动:当球受到一个作用在其特定点上的力的组合时,球将发生旋转运动。
这被称为转动力矩。
例如,如果将一个球在一个点上水平旋转,球将围绕该点旋转。
旋转运动涉及到角动量和角加速度等概念。
总的来说,球的行走路线原理是由施加在球上的力和球的运动状态共同决定的。
力的大小、方向以及球的初始速度和加速度都对球的运动轨迹产生影响。
这些原理在运动学和动力学中有详细的描述和数学表达。