Bettis阀门气动控制原理图和开关方式
- 格式:ppt
- 大小:4.19 MB
- 文档页数:10



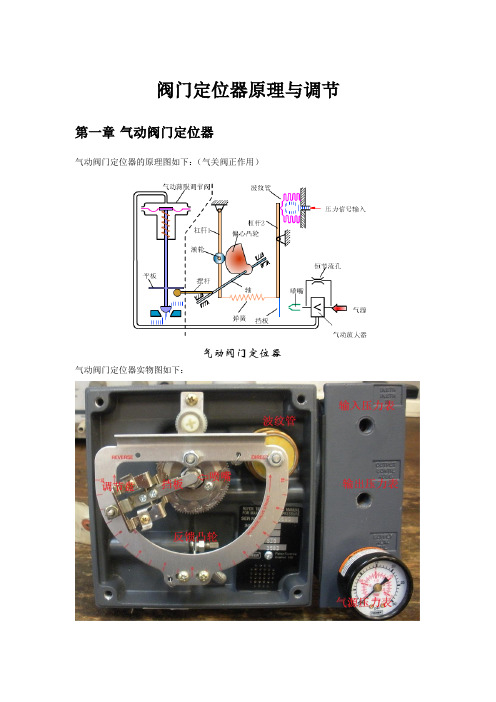
阀门定位器原理与调节第一章气动阀门定位器气动阀门定位器的原理图如下:(气关阀正作用)气动阀门定位器实物图如下:气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
要改变正反作用,Fisher的阀只需要把里面的调节盘拨到另一侧即可。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
至于气开阀,由于是在膜盒下面通气,需要将如图中的凸轮反转。
第二章电气阀门定位器由于现在DCS在现场使用越来越多,很多控制器都是使用了中控系统的控制器,所以中控到现场的都是4-20mA的电信号,到现场又需要阀动作的比较快。
虽然阀门定位器由最初的气/气阀门定位器、电/气阀门定位器发展到现在的数字阀门定位器、区域总线阀门定位器,但它们的基本原理和主要功能都没有大的改变。
定位器中基本自控元件介绍--电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
阀门定位器原理与调节第一章气动阀门定位器气动阀门定位器的原理图如下:(气关阀正作用)气动阀门定位器实物图如下:气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
要改变正反作用,Fisher的阀只需要把里面的调节盘拨到另一侧即可。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
至于气开阀,由于是在膜盒下面通气,需要将如图中的凸轮反转。
第二章电气阀门定位器由于现在DCS在现场使用越来越多,很多控制器都是使用了中控系统的控制器,所以中控到现场的都是4-20mA的电信号,到现场又需要阀动作的比较快。
虽然阀门定位器由最初的气/气阀门定位器、电/气阀门定位器发展到现在的数字阀门定位器、区域总线阀门定位器,但它们的基本原理和主要功能都没有大的改变。
定位器中基本自控元件介绍--电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。

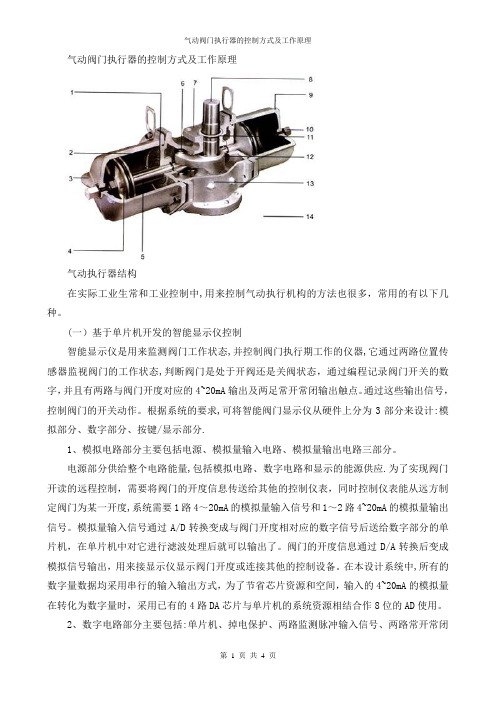
气动阀门执行器的控制方式及工作原理气动执行器结构在实际工业生常和工业控制中,用来控制气动执行机构的方法也很多,常用的有以下几种。
(一)基于单片机开发的智能显示仪控制智能显示仪是用来监测阀门工作状态,并控制阀门执行期工作的仪器,它通过两路位置传感器监视阀门的工作状态,判断阀门是处于开阀还是关阀状态,通过编程记录阀门开关的数字,并且有两路与阀门开度对应的4~20mA输出及两足常开常闭输出触点。
通过这些输出信号,控制阀门的开关动作。
根据系统的要求,可将智能阀门显示仪从硬件上分为3部分来设计:模拟部分、数字部分、按键/显示部分.1、模拟电路部分主要包括电源、模拟量输入电路、模拟量输出电路三部分。
电源部分供给整个电路能量,包括模拟电路、数字电路和显示的能源供应.为了实现阀门开读的远程控制,需要将阀门的开度信息传送给其他的控制仪表,同时控制仪表能从远方制定阀门为某一开度,系统需要1路4~20mA的模拟量输入信号和1~2路4~20mA的模拟量输出信号。
模拟量输入信号通过A/D转换变成与阀门开度相对应的数字信号后送给数字部分的单片机,在单片机中对它进行滤波处理后就可以输出了。
阀门的开度信息通过D/A转换后变成模拟信号输出,用来接显示仪显示阀门开度或连接其他的控制设备。
在本设计系统中,所有的数字量数据均采用串行的输入输出方式,为了节省芯片资源和空间,输入的4~20mA的模拟量在转化为数字量时,采用已有的4路DA芯片与单片机的系统资源相结合作8位的AD使用。
2、数字电路部分主要包括:单片机、掉电保护、两路监测脉冲输入信号、两路常开常闭转换触点输出。
在设计方案中选用目前普遍使用的51系列单片机AT89C4051。
AT89C4051是一款低电压、高性能的CMOS8位微控制器,它具有4K字节的可擦除、可重复编程的只读闪存.通过在单芯片内复合一个多功能的8位CPU闪存,在性能、指令设定和引脚上与80C51和80C52完全兼容.考虑到在系统掉电或重新启动时,需要保持先前在仪表中设置的一些阀门参数,而单片机中的数据存储器不具备掉电存储功能,所以在片外扩展了一个具有掉电保存功能的芯片X5045。
气动保位阀是阀位保护装置。
当仪表的气源压力中断,或气源供给系统发生故障时,气动保位阀能够自动切断调节器与调节阀气室,或定位器输出与调节阀气室之间的通道,使调节阀的阀位保持原来的控制位置,以保证调节回路中工艺参数不变。
这样介质的被调作用不中断,故障消除后,气动保位阀立刻恢复正常位置。
下图所示为气动保位阀的结构。
当气源信号进入气室B时,作用在比较部件2上的力,与弹簧1的作用力进行比较。
正常状态时,膜片比较部件2的推力,大于给定的弹簧力,此时平板阀芯3抬起,打开喷嘴4,通道处于正常工作状态。
当气源发生故障而供气中断时,气室B的压力下降,在弹簧力作用下,平板阀芯3盖住喷嘴,切断了气室A与输出口的通道。
也就是将气动执行机构的气室密封,使调节阀的工作位置保持在原来的位置上,起到保持阀位的作用。
气动保位阀结构图1—弹簧 2—比较部分 3、平板阀芯 4—喷嘴 A、B—气室TAG:气动薄膜三通调节阀气动智能调节阀气动薄膜双座调节阀气动薄膜衬四氟调节阀卫生级气动薄膜调节阀注:气动保位阀安装在定位器与膜头之间如果有电磁阀,电磁阀因安装在保位阀和膜头之间气动继动器本质上是一种气动放大器。
它与气动薄膜式或气动活塞式执行机构配套使用,用以提高气动执行机构的动作速度。
当仪表远距离传送压力信号,或执行机构气室的容量很大时,由于将产生较明显的传递时间滞后,因此,使用这种附件能显著提高执行机构的响应特性。
下面所示为一种典型的气动继动器的结构。
它是以力平衡原理工作的。
当由调节器或阀门定位器来的控制信号压力输入到气室A时,在膜组件1上产生一个向下的推力,膜片组件1向下转动,打开阀芯2。
此时,气源压力由阀芯、阀座之间的间隙,流人到反馈气室B,同时经由输出端被送到执行机构。
当膜片的上下两侧所产生的作用力相平稀时,输入信号与输出信号将保持一定的比例关系。
如果设P为信号压力,膜片组件1 上膜片的有效面积为A1,下膜片的有效面移为A2,输出压力为Pout,则有下列的平衡关系成立:气动继电器结构1—膜片组建 2—阀芯 3—针形阀PA1=PoutA2式中,面积A1、A2均为常数。
第二章气动执行机构(BETTIS)操作维护手册(一)BETTIS气动执行机构(ESDV阀)1 设备简介图1-2-1 ESDV阀门执行机构实际安装图图1-2-2 ESDV阀执行机构结构图1- 压力锁紧机构;2- Powr-swivl 活塞杆;3- Acculine 轴传动装置;4- NAMIR ;5- 可更换轴承;6- 推力轴套导向块;7- 共轭滚针推杆;8- 过载控制装置;9- 弹簧组件;10- 吊环;11- 环环紧扣;12- MSS 或ISO 执行机构/阀接口;13- 排气口;14- 压力槽;15- 双向行程限位;16- 内部双连杆。
2 使用操作方法1、执行机构手轮;2、电磁阀;3、电磁阀;4、过滤减压装置;5、限位开关;6、继电器;7、排气阀;8、测试开关;10、速度控制开关;11、电磁阀。
11 ♦●❍ ⏹ ☐ ❑☐图1-2-3 ESDV阀门执行机构工作原理图2.2 ESDV阀门执行机构控制2.2.1 现场手动开关手轮通过执行机构配套的手轮(或液压手轮)装置选择手动/气动,逆时针旋转手轮,通过液压装置可以现场打开阀门;顺时针旋转手轮,通过液压装置可以现场关闭阀门;手轮处于中间位置时,执行机构处于远程气动状态,通过站控(中控)系统能够远程控制打开(或关闭)阀门。
2.2.2 远程自动操作正常工作状态下,ESD电磁阀(冗余)励磁,由于该电磁阀为NC,励磁时电磁阀导通,导致ESD先导阀(冗余)导通(与ESD电磁阀相连的),压缩空气进入气缸,压缩弹簧,执行机构动作,阀门打开。
当发生紧急情况时,ESD电磁阀(冗余)失电,电磁阀断开,导致先导阀(冗余)断开(与ESD电磁阀相连的),执行机构气缸内的压缩空气通过该先导阀释放,弹簧复位,阀门关闭。
2.2.3 部分冲程测试正常工作状态下,部分冲程测试电磁阀不带电,该电磁阀为NO,失电时电磁阀导通,导致先导阀导通(与部分冲程测试电磁阀相连的),此时气源接通,阀门正常工作。
第二章气动执行机构(BETTIS)操作维护手册(一)BETTIS气动执行机构(ESDV阀)1 设备简介图1-2-1 ESDV阀门执行机构实际安装图图1-2-2 ESDV阀执行机构结构图1- 压力锁紧机构;2- Powr-swivl 活塞杆;3- Acculine 轴传动装置;4- NAMIR ;5- 可更换轴承;6- 推力轴套导向块;7- 共轭滚针推杆;8- 过载控制装置;9- 弹簧组件;10- 吊环;11- 环环紧扣;12- MSS 或ISO 执行机构/阀接口;13- 排气口;14- 压力槽;15- 双向行程限位;16- 内部双连杆。
2 使用操作方法1、执行机构手轮;2、电磁阀;3、电磁阀;4、过滤减压装置;5、限位开关;6、继电器;7、排气阀;8、测试开关;10、速度控制开关;11、电磁阀。
11 ♦●❍ ⏹ ☐ ❑☐图1-2-3 ESDV阀门执行机构工作原理图2.2 ESDV阀门执行机构控制2.2.1 现场手动开关手轮通过执行机构配套的手轮(或液压手轮)装置选择手动/气动,逆时针旋转手轮,通过液压装置可以现场打开阀门;顺时针旋转手轮,通过液压装置可以现场关闭阀门;手轮处于中间位置时,执行机构处于远程气动状态,通过站控(中控)系统能够远程控制打开(或关闭)阀门。
2.2.2 远程自动操作正常工作状态下,ESD电磁阀(冗余)励磁,由于该电磁阀为NC,励磁时电磁阀导通,导致ESD先导阀(冗余)导通(与ESD电磁阀相连的),压缩空气进入气缸,压缩弹簧,执行机构动作,阀门打开。
当发生紧急情况时,ESD电磁阀(冗余)失电,电磁阀断开,导致先导阀(冗余)断开(与ESD电磁阀相连的),执行机构气缸内的压缩空气通过该先导阀释放,弹簧复位,阀门关闭。
2.2.3 部分冲程测试正常工作状态下,部分冲程测试电磁阀不带电,该电磁阀为NO,失电时电磁阀导通,导致先导阀导通(与部分冲程测试电磁阀相连的),此时气源接通,阀门正常工作。