基于simulink的线性二自由度汽车模型稳态响应
- 格式:pdf
- 大小:213.99 KB
- 文档页数:6
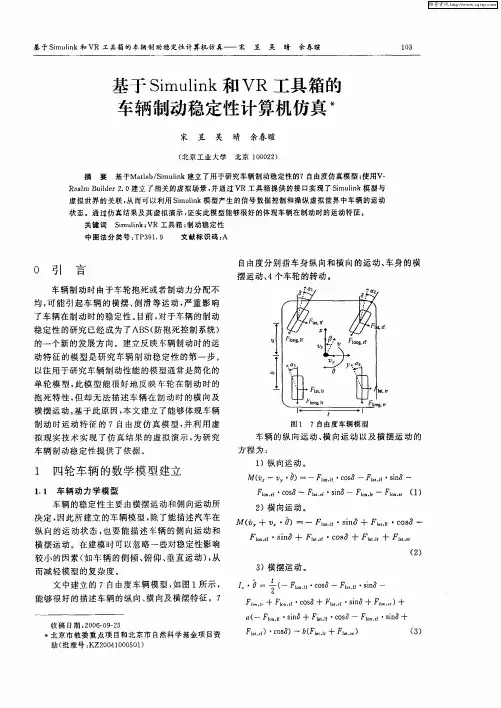
基于Simulink的车辆动力学仿真模型研究岳三玲;卜继玲;傅茂海【摘要】采用Simulink分别建立了车辆垂向-横向空间动力学模型、垂向动力学模型以及横向动力学模型,并根据三者的动力学性能仿真表现,对比提出了三种动力学模型的适应工况.【期刊名称】《机械制造与自动化》【年(卷),期】2010(039)001【总页数】4页(P127-130)【关键词】Simulink;仿真模型;动力学性能【作者】岳三玲;卜继玲;傅茂海【作者单位】西南交通大学,机械工程学院,四川,成都,610031;西南交通大学,机械工程学院,四川,成都,610031;西南交通大学,机械工程学院,四川,成都,610031【正文语种】中文【中图分类】工业技术· 信息技术·岳三玲,等·基于 Simulink 的车辆动力学仿真模型研究基于Simulink 的车辆动力掌仿真模型研究岳三玲,卜继玲,傅茂海(西南交通大学机械工程学院,四川成都 610031 )摘要:采用 Simulink 分别建立了车辆垂向一横向空间动力学模型、垂向动力学模型以及横向动力学模型,并根据三者的动力学性能仿真表现,对比提出了三种动力学模型的适应工况。
关键词:Simulink ;仿真模型;动力学性能中图分类号: TH113 ; U292.9 : TP391.9文献标志码: B文章编号: 1671-5276(2010)01-0127-04 Research onDynamicSimulationModelsof VehicleSystemBasedonSimulink YUE San-ling,BUJi-ling,FUMao-hai ( SchoolofMechanicalEngineering,SouthwestJiaotongUniversity,Chengdu610031,Chin a) Abstract:Three dynamicmodelsarerespectivelybuiltbySimulink,theyareverticaHateralspacedynamicmodel,verlicaldynamic modelandlateraldynamicmodel.Theadaptiveconditionsof the threemodelsareproposedaccordingto the simulationsof theirdy- namicperformance.Keywords:Simulink;simulationmodel;dynamicperforman ce轨道车辆是一个复杂的动力系统,在线路运行过程中,系统中各组成构件由于各种激扰的作用会产生力和位移的动态变化,这是机车车辆系统动力学的研究内容。
10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。
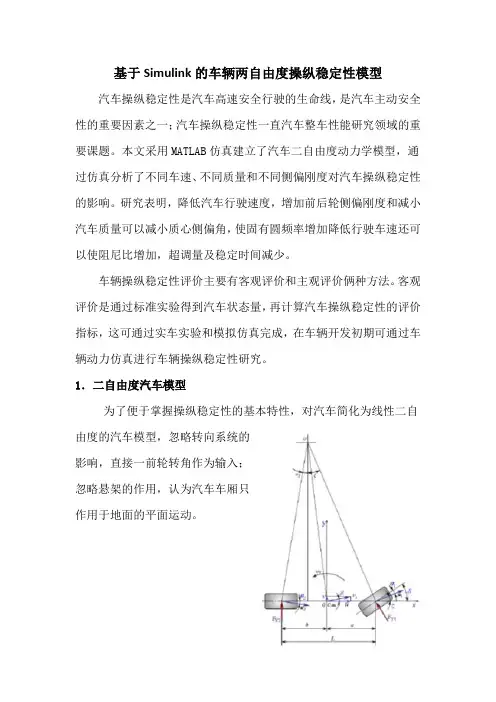
Science and Technology &Innovation ┃科技与创新2020年第17期·67·文章编号:2095-6835(2020)17-0067-03基于MATLAB 的二自由度和四自由度汽车振动模型分析金琦珺,罗骞*(武汉理工大学汽车工程学院,湖北武汉430070)摘要:以普通乘用车为例,将汽车简化成独立悬架整车二自由度与四自由度动力学模型,根据牛顿第二定律求出系统的运动微分方程,并利用MATLAB 研究了汽车振动的频率响应特性,求解得到该振动系统的固有频率和各主振型,绘制出车身、前后轴振动对前后轮激励的频率响应曲线图。
并着重研究了轮胎阻尼对汽车平顺性的影响。
该研究能够对减轻汽车振动及提高汽车行驶平顺性提供一定有益的参考。
关键词:MATLAB ;二自由度:四自由度;自由振动中图分类号:TH701文献标识码:A DOI :10.15913/ki.kjycx.2020.17.0261引言机械振动对于人类的生产生活来说是一把双刃剑,既可以服务于人类,又对人类的生产活动有重大危害。
机械振动既有有利的一面也有有害的一面。
需对振动进行动态分析,通过研究物体偏离平衡位置的位移、速度、加速度等的动态变化来达到目的。
在物体的平衡点附近出现的物体的来回运动,有线性和非线性两种振动模式。
由于外界对系统的激励或作用,使得机械设备产生噪声及有损于机械结构的动载荷,从而影响设备的工作性能和寿命。
尤其是发生共振情况时,可能使机器设备受到损坏,所以急需对机械振动的相关原理进行研究。
为了合理减小振动对设备的危害,充分利用振动进行机器运作,对机械振动产生的规律进行了探讨和研究。
随着计算机智能系统的快速发展,相关的仿真技术都出现了极大的提升空间,在日常的生产活动中,人们经常用到的相关软件有adams 、abaqus 等。
目前MATLAB 计算机软件在计算机的仿真方面使用更加广泛一些,MATLAB 是一款拥有强大绘图能力的工程计算高级计算机语言。
基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
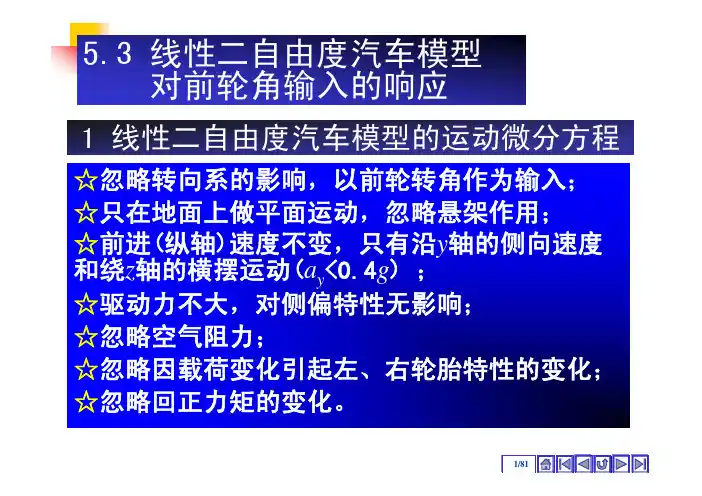
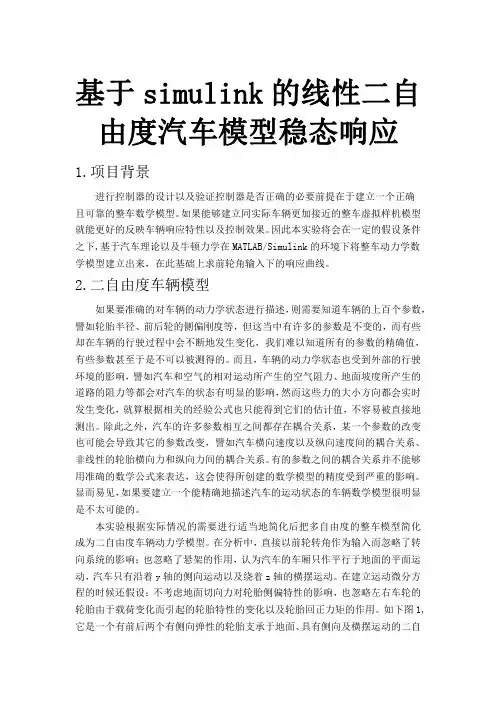
1.二自由度汽车模型为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2.运动学分析分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
确定汽车质心的(绝对)加速度在车辆坐标系的分量 和 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度 1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。
2.1 沿Ox 轴速度分量的变化为:由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为:()cos ()sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到Δθ很小并忽略二阶微量,上式变成:Δu-v Δθ,除以Δt 并取极限,便是汽车质心绝对加速度在车辆坐标系Ox 和Oy 上的分量为:2.2 二自由度动力学方程因此我们可以得出两自由度的基本操纵模型的运动方程:由于假设侧片刚度在线性区域,所以F y = -K αα(公式2) 在单轨模型中,前轮的侧向速度为v f =v+ar后轮的侧向速度为v r =v-br当α很小的时候,可以认为tan α≈α 所以:() 1 r yf yrz r yf yrm v uw F F I w aF bF +=+⎧⎪⎨=-⎪⎩(公式) 3r r r f u bw u u aw u ααδ-⎧≈⎪⎪⎨+⎪≈-⎪⎩(公式)12121221212112()()()()()r rZ r r k k ak bk m v uw k v w u u ak bk a k b k I w ak v w u u k δδ+-⎧+=--⎪⎪⎨-+⎪=--⎪⎩其中k 为前轮侧偏刚度为后轮侧偏刚度将转向输入δ作为系统的输入放在方程右边,并以状态空间方程的形式来表示,则可得到系统的运动方程为:2.3 转化成标准的状态空间方程转化为标准的状态空间方程为:()121212211212()()00()()z r r k k ak bk mu u um v v k I w w ak ak bk a k b k u u δ+-⎛⎫+ ⎪⎛⎫⎛⎫⎛⎫⎛⎫⎪+= ⎪⎪ ⎪ ⎪⎪-+⎝⎭⎝⎭⎝⎭⎝⎭⎪⎝⎭11;;;r X AX BUv A P Q B P R X U w δ--=+⎛⎫=-=== ⎪⎝⎭其中输入矢量为()121222121211;()()()()010r z z z X AX BUY CX DU v X U w k k ak bk u mu muA ak bk a k b k I u I u k mBCD ak I δ=+=+⎛⎫== ⎪⎝⎭+-⎛⎫-+ ⎪⎪= ⎪-+ ⎪⎝⎭⎛⎫- ⎪⎪=== ⎪- ⎪⎝⎭其中M文件定义的参数值Simulink模型二自由度汽车Simulink模型横摆角速度阶跃响应2.4以状态方程建立的仿真图A=-inv(p)*QB=inv(p)*RC=[0 1];D=[0];得到的仿真结果如上图的阶跃响应结果一样,不再给出。

汽车操纵稳定性客观评价方法综述白艳;贾鑫;宗长富;管欣【摘要】汽车操纵稳定性评价是汽车动力学研究中最重要的研究内容之一.目前,汽车设计最终的评价、调校阶段基于主观评价.为了要在样车生产出来之前即可在虚拟样机上预测和评价汽车操纵稳定性,就需要有一套可在计算机上实施的客观评价体系.汽车操纵稳定性客观评价主观化是操纵稳定性评价指标体系的研究目的和难点,一种方法是通过线形回归方法建立主客观评价指标之间的关系,这方面的研究较多但没有形成最终统一明确的客观指标体系.详细介绍汽车操纵稳定性客观评价的发展历史、评价方法、研究现状及展望,以及基于人车闭环系统中驾驶员模型的参数来评价汽车操纵稳定性的研究现状.%Vehicle handling evaluation is one of the most important research parts in vehicle dynamics. Currently , the tuning and final sign-off of a vehicle' s handling setup relies on subjective evaluation by experienced test engineers on roads and test tracks. To evaluate the virtual prototypes in computer, there is a need for some objective evaluation approaches. Setting up an objective evaluation system that could replace the subjective one during design phase is the aim of this research and is of great difficulty. Linear regression have been used a lot to establish the relationship between subjective and objective evaluation metrics, but it does not work well to conclude a clear objective evaluation system. The development and history, method, present and possible future research of vehicle handling evaluation, and another promising approach based on the driver model in the closed-loop system to evaluation the vehicle handling performance are reviewed.【期刊名称】《科学技术与工程》【年(卷),期】2012(012)006【总页数】9页(P1339-1347)【关键词】操纵稳定性评价;客观评价;人-车闭环【作者】白艳;贾鑫;宗长富;管欣【作者单位】吉林大学汽车动态模拟国家重点实验室,长春130025;吉林大学汽车动态模拟国家重点实验室,长春130025;吉林大学汽车动态模拟国家重点实验室,长春130025;吉林大学汽车动态模拟国家重点实验室,长春130025【正文语种】中文【中图分类】U461.61 发展及现状汽车操纵稳定性是车辆系统动力学的一个重要分支。
分布式驱动电动汽车直接横摆力矩控制策略与仿真验证张一西;马建;唐自强;刘晓东;贺伊琳【摘要】[目的]改善分布式驱动电动汽车复杂行驶工况下的操纵稳定性.[方法]提出了一种分布式驱动电动汽车直接横摆力矩双层控制策略,上层根据参考模型和车辆实际状态参数,基于模糊控制规则决策出维持车辆稳定所需的附加横摆力矩,并基于Carsim中无控制双移线工况仿真结果,确定了模糊控制变量的基本论域范围;下层以提高操纵稳定性为目标,引入HSRI轮胎模型,并充分考虑电机和路面附着极限等约束条件将所需的横摆力矩进行优化分配,在Matlab/Simulink-Carsim联合仿真环境下建立控制策略,通过正弦迟滞和双移线工况仿真验证控制策略的性能.[结果]仿真结果表明,相比于等转矩分配,正弦迟滞工况和双移线工况下横摆角速度和质心侧偏角的跟踪滞后时间缩短,且最大跟踪误差分别减小了约98%、97%.[结论]直接横摆力矩双层控制策略能够有效地实现横摆力矩优化分配,提高了车辆的操纵稳定性和行驶安全性.【期刊名称】《甘肃农业大学学报》【年(卷),期】2018(053)004【总页数】10页(P159-167,176)【关键词】分布式驱动;直接横摆力矩;模糊控制;优化分配【作者】张一西;马建;唐自强;刘晓东;贺伊琳【作者单位】长安大学汽车学院,陕西西安 710064;长安大学汽车学院,陕西西安710064;上汽集团技术中心,上海 201800;长安大学汽车学院,陕西西安 710064;长安大学汽车学院,陕西西安 710064【正文语种】中文【中图分类】U461.6电动汽车技术作为一种节能、环保的先进技术受到了各国政府、企业以及高校研究机构的重视[1].相比于传统的内燃机汽车和集中式驱动电动汽车,分布式驱动电动汽车具有驱/制动力矩独立可控的特点,且轮毂电机响应迅速、控制精度高、结构紧凑[2],为车辆利用直接横摆力矩实现操纵稳定性控制提供了有利的硬件基础[3].通过直接控制四轮驱动电机,产生附加横摆力矩,能够更好地提高车辆的操纵稳定性和行驶安全性.目前,国内外针对分布式驱动电动汽车直接横摆力矩控制已有大量的研究.Viehweider等[4]以横摆角速度和质心侧偏角为控制目标,采用H-∞理论计算附加横摆力矩,并采用基于伪逆法的转矩分配策略,同时考虑了路面附着极限的约束,但是忽略了电机转矩特性约束条件.Kim等[5]采用PI控制理论计算车辆直接横摆力矩,利用差动驱/制动转矩协调控制策略分配四轮转矩,但是控制策略只适用于低速情况下质心侧偏角较小的工况,高速时质心侧偏角增大.Kanchwala等[6]采用模型跟踪控制理论计算直接横摆力矩,结合线性二次型最优控制理论进行四轮转矩优化分配,但是该转矩分配控制忽略了电机转矩特性约束、轮胎附着极限等约束条件,具有一定的局限性.林程等[7]基于滑模控制算法计算附加横摆力矩,以提高操纵稳定性、降低电机能耗为目的,提出了驱动力矩优化分配控制策略,然而滑模控制存在抖振现象.本研究提出了一种基于双层控制结构的直接横摆力矩控制策略,以横摆角速度和质心侧偏角为联合控制目标,综合考虑了电机约束、路面附着极限约束,制定了转矩优化分配控制策略,同时基于复杂行驶工况下的仿真分析,验证了本研究提出的直接横摆力矩双层控制策略能够有效地提高车辆的操纵稳定性和行驶安全性.1 基于双层结构的直接横摆力矩控制策略现有的分布式驱动电动汽车直接横摆力矩控制普遍采用分层控制结构.上层采用基于参考模型跟踪的控制算法,根据驾驶员输入信号、车辆当前反馈状态等信息计算所需要的附加横摆力矩;下层将附加横摆力矩输入分配给各个电机执行器,控制4个车轮实现车辆运动控制[8].图1为本研究所提出的直接横摆力矩双层控制结构,上层为运动跟踪控制层,根据车辆模型输出的车辆行驶状态参数,如车速vx、前轮转角δ、横摆角速度γreal,质心侧偏角βreal等,结合二自由度参考模型得到动力学控制目标,即理想的横摆角速度值γmodel和质心侧偏角值βmodel,基于模糊决策计算维持车辆稳定行驶所需的附加横摆力矩ΔM,输入给下层控制器;下层为控制分配层,以轮胎利用率最小为控制目标,结合电机约束、路面附着极限约束、以及纵向力与横摆力矩需求,将上层决策出的附加横摆力矩进行优化分配,得到四轮转矩Tfl、Tfr、Trl、Trr输入车辆模型,达到车辆稳定性控制的目的.图1 直接横摆力矩双层控制结构Figure 1 Double layer structure of direct yaw moment control2 运动跟踪控制器2.1 参考模型线性二自由度车辆模型如图2所示.该模型忽略了轮胎的非线性以及轮胎的侧偏特性,只有沿Y轴的侧向运动和绕Z轴的横摆运动[9-11].线性二自由度车辆模型运动微分方程为:图2 二自由度参考模型Figure 2 2DOF reference model(1)式中,kf、kr为前、后轴侧偏刚度(N·rad-1);a、b为汽车质心到前、后轴的距离(m);m为汽车质量(kg);δ为前轮转角(rad);u为纵向速度(km·h-1);v为侧向速度(km·h-1);γ为横摆角速度(rad·s-1);β为质心侧偏角(rad);Iz为汽车绕Z 轴的转动惯量(km·m-2).仅考虑稳态转向的情况,此时代入式(1)得到横摆角速度和质心侧偏角稳态值为:(2)(3)式中,L为轴距,为稳定性因数.上述稳态值为线性轮胎模型下的响应值,而当车辆处于极限附着状态时,轮胎处于非线性状态,此稳态响应值不再适用,需对其进行修正.质心侧向加速度可表示为:(4)同时,侧向加速度还受到轮胎附着极限的限制:|ay|≤μ·g(5)车辆的质心侧偏角通常较小,因此,式(4)左边后两项的值远小于第一项,综合分析得到横摆角速度上限值为[11]:(6)一般情况下,在良好沥青路面上,车辆质心侧偏角大于10°会出现严重失稳现象;在积雪路面上,侧偏角只要达到4°就会失去控制[10].因此,根据经验得出质心侧偏角上限值为:βmax=arctan(0.02μg)(7)综上,为满足不同路面附着条件,修正后的横摆角速度和质心侧偏角目标值分别为:(8)(9)2.2 模糊控制器设计模糊控制方法的特点是不需要建立被控对象的精确数学模型,其控制效果仅依赖于控制变量的控制规则,本研究选用双输入单输出的Mamdani模糊控制结构来决策附加横摆力矩.如图3所示,模糊控制器的输入为实际横摆角速度与目标横摆角速度的偏差eγ及实际质心侧偏角与目标质心侧偏角的偏差eβ,输出为附加的横摆力矩ΔM.图3 双输入单输出模糊控制器Figure 3 Fuzzy controller includes two inputs and single output施加稳定性控制的前提是车辆处于严重失稳状态之前,若车辆已经处于严重偏离目标行驶轨迹的失稳状态,即使施加稳定性控制,也未必能够使其恢复稳定行驶状态.双移线工况能够反映车辆的操纵稳定性,在此根据国标ISO3888-1:1999中规定的双移线仿真工况,基于Matlab/Simulink-Carsim联合仿真平台,分别仿真得到车辆无控制时,3种车速下的目标质心侧偏角、横摆角速度与实际值的差值,如图4所示,根据该仿真结果确定模糊控制输入输出变量的基本论域范围.由图4可以看出,车速为60 km/h时,车辆能够很好地跟踪目标行驶轨迹,侧向加速度小于0.4 g,轮胎处于线性稳定区域;车速为90km/h时,车辆虽偏离目标行驶轨迹,侧向加速度增大,但此时侧向加速度仍小于0.4 g,轮胎仍处于线性稳定区域;车速为120 km/h时,车辆已偏离目标轨迹,侧向加速度较大,峰值处的侧向加速度大于0.4 g,轮胎处于非线性区域.根据上述结果分析,取输入量eγ的基本论域为[-0.12,0.12],eβ的基本论域为[-0.06,0.06].设置模糊控制器输入输出模糊论域范围为[-6,6],输入输出变量的语言值为{负大、负中、负小、零、正小、正中、正大},对应模糊子集{NB、NM、NS、ZO、PS、PM、PB},各模糊子集的隶属度函数选用左右对称的三角形隶属度函数,制定输入输出变量的隶属度函数如图5所示.图4 无控制双移线工况下仿真结果Figure 4 Simulation results without control of double lane change condition图5 模糊控制变量隶属度函数Figure 5 Membership function of fuzzy controller variables根据经验可知,若车辆出现不足转向,对车辆附加一个正向的横摆力矩来减小不足转向趋势;若车辆出现过多转向,对车辆附加一个反向的横摆力矩来减小过多转向趋势[12],模糊控制系统中所使用的模糊规则为:If(eγ,is Eγ)and(eβis Eβ)then(ΔM is EΔM)式中,Eγ,Eβ,ΔM分别为输入量eγ,eβ和输出量ΔM的模糊子集.具体的模糊控制规则如表1所示.经过模糊规则推理输出的只是横摆力矩的模糊量,还需通过反模糊化的方法将其转化为精确量,在此选择面积重心法进行反模糊化处理.表1 模糊控制规则Table 1 Rules of fuzzy controller质心侧偏角横摆角速度NBNMNSZOPSPMPBNBPBPBPBPMPMZOZONMPBPBPMPMPSZOZONSPB PMPSPSPSZOZOZONBNMNSZOPSPMPBPSZOZONSNSNSNMNBPMZOZO NSNMNMNBNBPBZOZONMNMNBNBNB2.3 横摆力矩约束当车辆处于非稳定行驶状态时,模糊控制器根据输入参数的误差情况制定出稳定车辆的横摆力矩,但是,若车辆所处的路面不能够提供模糊控制器输出的横摆力矩,仍强行施加横摆力矩,则可能造成个别车轮出现过度滑转现象,反而不利于车辆稳定[13].在此,参考文献[13],若模糊控制器输出的横摆力矩大于横摆力矩限值则输出横摆力矩限值;若小于,则输出由模糊控制得到的横摆力矩.已知,地面能够提供的最大横摆力矩Mzmax为:(10)式中,Bf、Br分别为前、后轮轮距(m).其与模糊控制器输出的横摆力矩值差值为:eM=Mz max-Mzfuzzy(11)则最终输出的横摆力矩为:(12)3 四轮驱动转矩优化分配现有的转矩分配方法主要包括非优化分配算法和优化分配算法,优化分配算法又包括广义逆法、二次规划法、加权最小二乘法等.本研究采用加权最小二乘法进行优化分配求解.3.1 优化分配目标函数轮胎利用率是单个轮胎上轮胎力与路面所能提供最大附着力的比值,最大值为1,轮胎利用率表征了汽车的稳定性.在相同行驶状态下,轮胎附着利用率越小,表示轮胎力与最大附着力差别越大,轮胎的附着裕量越多,车辆在极限工况下维持稳定行驶的能力也越强,反之则越弱.如果轮胎利用率达到1,说明汽车已达到附着极限,随时有失稳危险.在此,以轮胎附着利用率最小为优化分配目标函数,如下:(13)式中,μi为轮胎与路面间的附着系数;Fxi为车轮所受纵向力(N);Fyi为车轮所受侧向力(N);Fzi为车轮当前垂向载荷(N);Ci为车轮权重系数;i=fl、fr、rl、rr,分别表示左前、右前、左后、右后.在极限工况下,轮胎纵向力和侧向力存在一定的耦合关系,侧向力无法直接控制,需要通过在线的轮胎模型进行估计[14].在此,引入HSRI轮胎模型[15]表示侧向力,HSRI轮胎模型考虑了轮胎的非线性,结构简单,纵向力与侧向力的关系容易表示,侧向力可表示为:(14)Cai与Cλi分别为车轮在名义静态载荷下的侧偏刚度和纵向刚度,αi与λi分别为车轮侧偏角和滑转率.在此,假设路面峰值附着系数处处相等为μ,则优化分配目标函数转化为:(15)Mokhiamar等[16]通过对3种不同前后轴权重系数取值结果进行对比分析得出:减小车辆前轴分配权重系数,相当于减小前轮电机转矩增大后轮电机转矩,导致后轮侧偏角增大,此时车辆有过多转向的趋势;反之,增大后轴分配权重系数,将使车辆趋于不足转向.因此,通过调整前后轴权重系数,可以改善车辆在极限工况下的行驶稳定性,改变车辆行驶状态.在此,为提高车辆操纵稳定性,使车辆趋于不足转向,取前轴两轮权重系数Cfl=Cfr=1,后轴权重系数在1~2调整.当横摆角速度实际值大于期望值时,增大后轴权重系数,适当减小过多转向趋势,增加不足转向.同时,考虑到极限工况下车辆常常伴随着轴荷转移,垂直载荷变化的不同会使得车轮所受地面摩擦力各不相同,将车辆纵向和横向加速度同轮胎静载荷结合起来,对单个轮胎的垂直动载荷进行重新分配得:(16)3.2 优化分配约束条件首先分配给各车轮的转矩应该满足纵向力需求和横摆力矩需求:(17)将其写为矩阵的形式:v=Bu(18)其中:v=u=其次,纵向力应该满足单个电机所能提供的最大转矩约束:(19)式中,Timax为电机最大输出转矩(N·m),r为车轮半径(m).由摩擦椭圆定理:Fxi2+Fyi2≤μi2Fzi2(20)因此,对于驱动控制,得单个车轮路面附着约束:(21)3.3 基于加权最小二乘法的驱动轮转矩优化分配综上,结合优化分配目标函数与约束条件,将四轮转矩优化分配问题描述为二次规划标准型的形式[17]进行求解:(22)(23)其中,同时,将式(18)转化为min‖Bu-v‖2,作为优化目标的一部分,则二次规划标准型转化为序列最小二乘规划问题的形式:(24)式中,Wu、Wv是权重矩阵.在此,引入权重系数α,最终四轮转矩优化分配问题转化为加权最小二乘法问题:а(25)在此,采用有效集法[18]进行加权最小二乘法问题求解.4 仿真分析为了验证本研究提出的控制策略的有效性,基于Matlab/Simulink-Carsim联合仿真平台进行操纵稳定性仿真验证,Carsim作为成熟的商用软件,具有自由度高、仿真精度高、运算稳定等优点[19].如图6所示为直接横摆力矩双层控制策略仿真模型.首先,基于Carsim中的B-Class车辆模型,通过对动力传动系统的优化匹配[20],得到经过整理后的CS B-Class车辆模型的部分参数,如表2所示.定义Carsim输入输出接口,将其链接到Matlab/Simulink中的双层控制策略模型,并正确连接控制策略模块与Carsim整车模块中对应的输出输入接口,实现MATLAB/Simulink与Carsim联合仿真平台的搭建,分别进行双移线工况和正弦迟滞工况仿真验证,并将本研究提出的优化分配结果与等转矩分配结果进行对比. 图6 基于Matlab/Simulink与Carsim联合仿真的双层控制策略仿真模型Figure 6 Double layer control strategy model based on Matlab/Simulink-Carsim co-simulation表2 整车参数Table 2 Parameters of commercial vehicle参数名称数值整车质量m/kg1 231质心到前轴的距离lf/m1.04质心到后轴的距离lr/m1.56轮距B/m1.481前轴侧偏刚度kf/(N·rad-1)-2800后轴侧偏刚度kr/(N·rad-1)-2300车轮滚动半径R/m0.304转向系传动比i204.1 正弦迟滞仿真工况以120 km/h稳定车速,路面附着系数为0.85进行正弦迟滞工况仿真,正弦迟滞工况方向盘转角变化如图7所示,仿真结果如图8所示.两种分配情况下,横摆角速度和质心侧偏角峰值响应对比结果如表3和表4所示.结合图表可以看出,相对于等转矩分配来说,优化分配情况下的横摆角速度和质心侧偏角响应的收敛速度均有所提高,横摆角速度滞后时间缩短了0.06 s,质心侧偏角滞后时间缩短了0.271 s,且峰值处的跟踪误差明显低于等转矩分配,质心侧偏角最大峰值误差降低了98%,而横摆角速度峰值实际响应值与目标值几乎相等.验证了正弦迟滞工况下,转矩优化分配方法的有效性.由图8(b)、(c)、(d)可以看出,在1.5 s时车辆的侧向加速度达到了0.6 g,此时轮胎处于非线性区域,极易发生侧滑现象,由于二自由度参考模型存在非线性误差,横摆角速度和质心侧偏角实际值与期望值也出现了偏差,但1.5s之后车辆便恢复了稳定行驶,总体控制效果良好.验证了正弦迟滞工况下,本试验所提出的直接横摆力矩控制策略能够较好地跟踪目标值,维持车辆稳定行驶.表3 横摆角速度峰值响应Table 3 Peak response of yaw rate分配算法峰值/(deg·s-1)峰值出现时间/s峰值误差/(deg·s-1)期望值18.970.36-优化分配18.950.420.02等转矩分配14.180.484.79图7 正弦迟滞工况仿真结果Figure 7 Simulation results under sinusoidal hysteretic conditon表4 质心侧偏角峰值响应Table 4 Peak response of side slip angle分配算法峰值/deg峰值出现时间/s峰值误差/deg期望值-0.691 50.359-优化分配-0.686 70.4020.004 8等转矩分配-1.152 10.6730.460 44.2 双移线仿真工况双移线工况能够较好地反映驾驶员在紧急避障操作下车辆的响应特性,以90km/h稳定车速,路面附着系数为0.85进行双移线仿真试验,仿真结果如图9所示.表5、6为在两种分配情况下,由图9(b)、(c)得到的横摆角速度和质心侧偏角峰值响应对比.结合图表可以看出,等转矩分配情况下,横摆角速度和质心侧偏角的实际值与目标值相差较大,其中横摆角速度最大误差达到了6.69 deg/s,无法满足车辆稳定行驶所需的横摆力矩需求,而优化分配情况下,横摆角速度和质心侧偏角能够更好地跟踪目标值,相比等转矩分配,横摆角速度最大峰值误差减小了97%,而质心侧偏角实际最大峰值响应值与目标值几乎相等,且两个控制量响应的收敛速度提高,横摆角速度滞后时间缩短了0.026 s,质心侧偏角滞后时间缩短了0.238 s.验证了双移线工况下,直接横摆力矩控制策略能够满足车辆稳定行驶的要求,具有较好的控制性能.表5 横摆角速度峰值响应值Table 5 Peak response of yaw rate分配算法最大峰值/(deg·s-1)最大峰值出现时间/s峰值误差/(deg·s-1)期望值16.612.743-优化分配16.822.7860.21等转矩分配9.922.8126.69表6 质心侧偏角峰值响应值Table 6 Peak response of side slip angle分配算法最大峰值/deg最大峰值出现时间/s峰值误差/deg期望值-0.2326.064-优化分配-0.2335.9140.001等转矩分配-0.5196.1520.287图8 双移线工况仿真结果Figure 8 Simulation results under double lane change conditon5 结论1) 本研究以分布式驱动电动汽车为研究对象,利用其驱/制动力矩独立可控的优点,设计了具有双层控制结构的直接横摆力矩控制策略,上层根据模糊控制规则得到期望横摆力矩输出,下层利用有约束加权最小二乘法实现了四轮驱动转矩优化分配. 2) 为了验证本研究所提出的控制策略的有效性,采用Carsim与Matlab联合仿真技术建立了直接横摆力矩控制策略,分别进行了正弦迟滞工况和双移线工况仿真.通过仿真验证可知,相比于等转矩分配,正弦迟滞工况下,横摆角速度和质心侧偏角的响应滞后时间分别缩短了0.06 s和0.271 s,最大峰值跟踪误差降低了近98%,同时在侧向加速度达到0.6 g的情况下仍能够维持车辆稳定行驶;双移线工况下,横摆角速度和质心侧偏角的响应滞后时间分别缩短了0.026 s和0.238 s,最大峰值跟踪误差降低了近97%,验证了本研究所提出的控制分配策略能够满足车辆在复杂行驶工况下的稳定性需求.3) 本研究所提出的直接横摆力矩控制策略实现了四轮转矩的优化分配,充分利用了分布式驱动电动汽车的优势,提高了车辆的操纵稳定性和行驶安全性.下一步研究将对控制策略进行完善并进行相关的实车验证.参考文献【相关文献】[1] 许世维,唐自强,王栋梁,等.电动商用车串联制动控制策略[J].甘肃农业大学出版社,2016,51(4):113-120.[2] XIONG L,YU Z P,WANG Y.Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffnessestimation[J].Vehicle System Dynamics,2012,50(6):831-846.[3] 张缓缓,向绪爱,叶克宝.基于稳定性的四轮独立驱动电动汽车转矩分配策略研究[J].公路交通科技,2016,33(5):141-146.[4] VIEHWEIDER A,SALVUCCI V,HORI Y.Improving EV lateral dynamics control using infinity norm approach with closed-form solution[C]∥International Conference on Mechatronics.New York:IEEE,2013:388-393.[5] VKIM D H,KIM C J,KIM S H.Development of adaptive direct yaw-moment control method for electric vehicle based on identification of yaw-rate model[C]∥In telligent Vehicle Symposium.New York:IEEE,2011:1098-1103.[6] KANCHWALA H,BORDONS C.Improving handling performance of an electric vehicle using model predictive control[C]∥International Conference on Automotive Engineering.New York:IEEE,2015:112-129.[7] 林程,徐志峰,张虹,等.分布式电驱动汽车驱动力矩优化控制分配[J].北京理工大学学报,2016,36(7):668-72.[8] 余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,49(8):105-114.[9] 武冬梅.分布式驱动电动汽车动力学控制机理和控制策略研究[D].长春:吉林大学,2015.[10] RAJAMANI R.Vehicle dynamics and control[M].2nd.New York:Springer,2012.[11] 杨龙.分布式驱动电动汽车直接横摆力矩控制[D].重庆:重庆大学,2016.[12] 张利鹏,李亮,祁炳楠,等.双电机分布式驱动汽车高速稳定性机电耦合控制[J].机械工程学报,2015,51(16):29-40.[13] 王博.四轮独立电驱动车辆实验平台及驱动力控制系统研究[D].北京:清华大学,2009.[14] FUJIMOTO H,YAMAUCHI Y.Advanced motion control of electric vehicle based on lateral force observ er with active steering[C]∥International Symposium on Industrial Electronics.New York:IEEE,2010:3627-3632.[15] TIELKING J T,MITAL N K,PFAFF G.A comparative evaluation of five traction tire models[R].Interim Document 6,Michigan:Highway Safety Research Institute,University of Michigan,1974.[16] MOKHIAMAR O,ABE M.How the four wheels should share forces in an optimum cooperative chassis control[J].Control Engineering Practice,2006,14(3):295-304.[17] 龚纯,王正林.精通MATLAB最优化计算[M].2版.北京:电子工业出版社,2012:255-268.[18] HARKEGARD O.Efficient active set algorithms for solving constrained least squares problems in aircraft control allocation[C]∥Proceeding of the 41st IEEE Conference on Decision and Control.New York:IEEE,2002:1295-1300.[19] 熊璐,陈晨,冯源.基于Carsim/Simulink联合仿真的分布式驱动电动汽车建模[J].系统仿真学报,2014,26(5):1143-1155.[20] 龚贤武,唐自强,赵轩,等.轮边电机驱动电动汽车动力系统参数优化设计[J].合肥工业大学学报(自然科学版),2017,40(1):24-30.。
线性二自由度汽车操纵稳定性Simulink 仿真汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能够遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且遇到外界干扰时,汽车能够抵抗干扰而保持稳定行驶的能力,汽车的操纵稳定性是汽车主动安全性的重要评价指标之一。
操纵稳定性包括:汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性;转向盘输入有角位移输入和力矩输入;外界干扰输入主要指侧向风和路面不平产生的侧向力。
1. 转向盘角阶跃输入下的响应稳态响应,评价参量为 横摆角度速度增益—转向灵敏度瞬态响应,评价参量为 反应时间;横摆角速度波动的无阻尼园频率。
2. 横摆角速度频率响应特性转向盘转角正弦输入下,频率由0至∞变化时,汽车横摆角速度与转向盘转角的振幅比及相位差的变化规律。
评价参量为:共振峰频率;共振时的振幅比;相位滞后角;稳态增益。
3. 转向盘中间位置操纵稳定性转向盘小转角、低频正弦输入下,汽车高速行驶时的操纵稳定性。
评价参量为:转向灵敏度、转向盘力特性、转向功灵敏度。
4. 回正性转向盘力输入下的时域响应。
评价参量为:回正后剩余横摆角速度与剩余横摆角;达到剩余横摆角速度的时间。
轮胎的侧偏特性为:αk F Y =,k 为侧偏刚度,Y F 一定时,侧偏角越小越好,因此k 越大越好;前轮侧偏角在4度内时,轮胎侧偏特性呈线性变化。
图1线性二自由度汽车模型对前轮角输入的响应建模假设:忽略转向系统的影响,直接以前轮转角为输入;忽略悬架的作用,车身仅作平行于地面的平面运动,绕z 轴的位移、绕y 轴的俯仰角和绕x 轴的侧倾角均为零;汽车前进速度不变。
汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。
图2假定汽车g y 4.0≤α(质心加速度在y 轴的投影),轮胎侧偏特性处于线性范围内,不计地面切向力Fx 、外倾侧向力Fy γ、回正力矩Tz 、垂直载荷的变化对轮胎侧偏刚度的影响;简化后的两轮汽车模型及车辆坐标系如下:图3确定汽车质心加速度(绝对加速度)在车辆坐标系的分量x α和y α,图4沿OX 轴速度分量的变化为:()()θθθθθθ∆∆-∆--∆∆+∆=∆∆+--∆∆+sin sin cos cos sin cos v v u u u v v u u u考虑θ∆很小,忽略二阶微量,则有: θθθθθ∆-∆=∆∆-∆--∆∆+∆v u v v u u u sin sin cos cos 上式除t ∆,取极限得r x v u dtd v dt du a ωθ-=-= 同理可得r y u va ω+=二自由度汽车运动力学分析2121cos cos Y Y Z Y Y Y bF aF M FF F -=+=∑∑δδ 考虑δ较小,1cos =δ111αk F Y =,222αk F Y =则有:22112211ααααbk ak M k k F Z Y -=+=∑∑ 质心侧偏角u v =β ua u a v r r ωβωξ+=+= ()δωβξδα-+=--=ua r 1 ub u b v r r ωβωα-=-=2⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-+=∑u b k u a k F r r Y ωβδωβ21 ⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛-+=∑u b bk u a ak M r r Z ωβδωβ21 由于y Y ma F =∑,r Z Z I M ω=∑ ()r rr u v m u b k u a k ωωβδωβ+=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-+ 21 r Z r r I u b bk u a ak ωωβδωβ =⎪⎭⎫ ⎝⎛--⎪⎭⎫ ⎝⎛-+21即()()()r r u v m k bk ak uk k ωδωβ+=--++ 121211 ()()r Z r I ak k b k a ubk ak ωδωβ =-++-12212211 动力学方程可变形为δβωωZZ r Z r I ak I bk ak u I k b k a 1212212--++= δβωβmu k mu k k mu bk ak r 1212211-++⎪⎭⎫ ⎝⎛--= 即状态空间为δβωβω⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡211122211211b b a a a a r r δβωβω⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡001001r r 其中uI k b k a a Z 221211+=,Z I bk ak a 2112-=,Z I ak b 111-= 122121--=mu bk ak a ,mu k k a 2122+=,muk b 121-=仿真参数设置:仿真时间1.5s 汽车总质量 m=1818.2Kg 绕z 轴转动惯量I Z =3885Kgm 2轴距L=3.084m 质心至前轴距离a=1.463m 质心至后轴距离b=1.585m前轮总侧偏刚度k 1=-62618N/rad 后轮总侧偏刚度k 2=-110185N/rad仿真模型为:仿真工况1:前轮转角1度,车速80Km/h 下,仿真结果为:仿真工况2:车速80Km/h下,前轮转角分别为1度、2度和3度,仿真模型为:由上图可见,在车速为80km/h下,随前轮转角的增大,汽车质心侧偏角明显增大且开始出现振荡,固有圆频率及阻尼比减小,超调量及稳定时间增加,因此应避免在高速行驶时急转方向盘产生大的前轮转角。