关于线性二自由度汽车模型的运动微分方程
- 格式:doc
- 大小:2.10 MB
- 文档页数:5
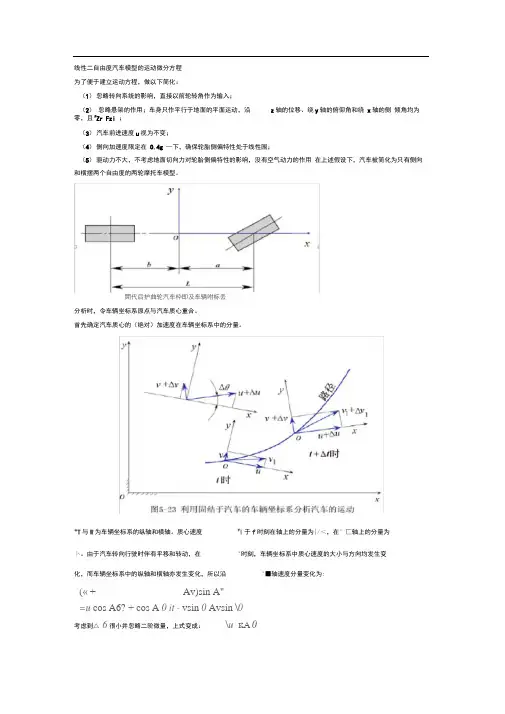
线性二自由度汽车模型的运动微分方程为了便于建立运动方程,做以下简化:(1)忽略转向系统的影响,直接以前轮转角作为输入;(2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ;(3)汽车前进速度u视为不变;(4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围;(5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。
閒代后护曲轮汽车枠即及车辆咐标丟分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
"T与W为车辆坐标系的纵轴和横轴。
质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为卜。
由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为:(« + Av)sin A"=u cos A6? + cos A 0 it -vsin 0 Avsin \0考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量du dO *a -- ----- v——= n-va)x dt dt r同理得:叭"刊叫下面计算二自由度汽车的动力学方程< ------------------------------ --------------------------------------- ih二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为》禺=洛心方"二11式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:=片碣 + kya z I 工恢=ak l a ]-bk 2a 2\ 下面计算二自由度汽车的动力学方程二自由度汽车受到的外力沿 轴方向的合力与绕质心的力矩和为£幵=F”£OM+尽 11式中,呂|, F 伫为地面对前后轮的侧向反作用力,即侧偏力; 5为前轮转角 考虑到’很小,上式可以写成:*冋+k 2a 2 工虽=昭绚-风耳汽车前后轮侧偏角与其运动参数有关。
基于MATLAB的车辆两自由度操纵稳定性模型及分析汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1二自由度汽车模为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析确定汽车质心的(绝对)加速度在车辆坐标系的分量a a 和a a 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度a 1与t 时刻在Ox 轴上的分量为u ,在oy 轴上的分量为v 。
沿Ox 轴速度分量的变化为:()()cos sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到∆θ很小并忽略二阶微量,上式变成:除以∆t并取极限,便是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为:u x r d d v u v dt dt a θω=-=-同理,汽车质心绝对加速度沿横轴oy 上的分量为:y rv u a ω=+二自由度动力学方程二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为:1212cos a cos YY Y ZY Y b F F FM F Fδδ=+=-∑∑式中,a a 1,a a 2为地面对前后轮的侧向反作用力;δ为前轮转角。
《汽车理论II》课程的理论联系实际一体化教学模式探摘要:结合《汽车理论II》课程的特点和传统教学模式的不足,提出采用理论联系实际一体化教学模式对课程教学方法、教学手段及考评体系进行改革与创新。
在教学方法上,提出工程实例应用引出理论推导的新教学方法;在教学手段上,提出了“多媒体+黑板”相结合的多元化教学手段;在考评体系上,提出“体验性作业+课堂讨论表现+期末考试”的新综合考评体系。
关键词:汽车理论II 理论联系实际教学模式探索《汽车理论II》课程是汽车工程专业的专业必修课和核心主干课,诣在使汽车工程专业本科生掌握汽车操纵稳定性、行驶平顺性及通过性的相关专业知识,为后续《汽车设计》课程提供理论基础和选择设计参数的原则。
该课程以力学为基础,集成了工程测试学、机械振动学、汽车试验学等多门课程的基本原理和方法,具有涉及内容复杂、综合性强、理论知识抽象等特点[1]。
国内从事汽车工程专业教学科研的院校师生普遍反映该课程的理论学习、理解及应用并非易事[2]。
为了使汽车工程专业本科生能够更深刻地理解和掌握《汽车理论II》课程的相关理论知识,同时为了贯彻教育部关于高等学校本科教学质量与教学改革工程文件的精神和适应学校培养创新性工程应用型人才需求。
本文提出将理论联系实际一体化教学模式应用于《汽车理论II》课程的教学过程,并进行了初步探索。
1 传统教学模式及其改革与探索1.1 传统教学模式《汽车理论II》课程的传统教学模式是以教师讲解和公式推导为主,理论内容的讲解以灌输式讲授为主。
教学过程中教师发挥着主体作用,学生始终处于被动吸收知识状态,整个教学过程既难以调动学生的积极性和主动性,也不利于培养学生创造性思维和工程应用能力[3]。
此外,该课程理论性较强,特别是复杂的力学模型和数学模型很难与汽车的实际结构和工作原理相联系[4],面对复杂的力学模型和大量的数学公式推导使学生在学习初期很容易产生恐惧心理,从而极大打击了学生对课程的兴趣和积极性,导致课程的教学质量与效果严重下滑。
线性二自由度汽车模型的运动微分方程为了便于建立运动方程,做以下简化:1忽略转向系统的影响,直接以前轮转角作为输入;2忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且l r Z Z F F ;3汽车前进速度u 视为不变;4侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围;5驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用;在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型;分析时,令车辆坐标系原点与汽车质心重合;首先确定汽车质心的绝对加速度在车辆坐标系中的分量; 与为车辆坐标系的纵轴和横轴;质心速度于时刻在轴上的分量为,在轴上的分量为;由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿轴速度分量变化为: 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量 同理得:下面计算二自由度汽车的动力学方程二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角;考虑到很小,上式可以写成:下面计算二自由度汽车的动力学方程二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角;考虑到很小,上式可以写成:汽车前后轮侧偏角与其运动参数有关;如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,;质心侧偏角为,;为与轴的夹角,其值为:根据坐标系的关系,前后轮侧偏角为由此,可以列出外力,外力矩与汽车参数的关系式为所以,二自由度汽车的运动微分方程为由此,可以列出外力,外力矩与汽车参数的关系式为所以,二自由度汽车的运动微分方程为上式可以变形为:写成状态方程为:中。
3 汽车的操纵稳定性目录3 汽车的操纵稳定性 03.1 自由刚体运动微分方程 (1)补充知识:自由刚体的运动(摘自《理论力学》上册) (1)(一)建立坐标系 (3)(二)汽车上任一点的运动方程 (5)(三)汽车运动的动力学方程 (8)3.2 线性二自由度汽车运动微分方程及分析 (11)(一)运动微分方程 (11)(二)稳态响应分析 (13)(三)瞬态响应分析 (17)3.3 车厢侧倾分析 (19)(一)车厢的侧倾轴线 (19)(二)悬架的侧倾线刚度 (22)(三)悬架的侧倾角刚度 (25)(四)车厢的侧倾角 (26)(五)车厢侧倾后垂直载荷在左、右侧车轮上的重新分配 (29)(六)车厢侧倾对转向系统的其它影响 (32)3.4 线性三自由度汽车运动微分方程分析 (35)(一)三自由度汽车运动微分方程 (35)(二)稳态响应 (43)(三)瞬态响应 (43)3.5 前轴和转向轮摆振方程 (47)(一)前左轮主销的摆动方程 (47)(二)前右轮主销的摆动方程 (52)(三)前轴绕纵轴的摆动方程 (52)3汽车的操纵稳定性操纵稳定性定义(两个方面):a 、汽车能遵循驾驶员通过转向系及转向车轮给定的方向行驶;b 、当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
汽车的操纵稳定性是决定高速汽车安全行驶的一个主要性能,也称为“高速车辆的生命线”。
3.1 自由刚体运动微分方程补充知识:自由刚体的运动(摘自《理论力学》上册)工程中,有一些刚体,如飞机、火箭、人造卫星等,它们在空间可以作任意的运动,这样的刚体称为自由刚体。
为了确定自由刚体在空间的位置,取定坐标系oxyz 和与刚体固结的动坐标系0x y z '''',如下图所示。
只要确定了动坐标系的位置,刚体的位置也就确定了。
动坐标系的原点o '是任意选取的,称为基点。
在基点上安上一个始终保持平动的坐标系o ξηζ',则自由刚体的运动可分解为随基点的平动和绕基点的转动。
线性二自由度汽车模型的运动微分方程 为了便于建立运动方程,做以下简化:
(1)忽略转向系统的影响,直接以前轮转角作为输入;
(2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z 轴的位移、绕 y 轴的俯仰角和绕 x 轴的侧倾角均为零,且
l r Z Z F F ;
(3)汽车前进速度u 视为不变;
(4)侧向加速度限定在0.4g 一下,确保轮胎侧偏特性处于线性范围;
(5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用。
在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。
分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
与
为车辆坐标系的纵轴和横轴。
质心速度
于时刻在
轴上的分量为
,在
轴上的分量为。
由于汽车转向行驶时伴有平移和转动,在时刻,车辆坐标系中质心速度的大小与方向均发生变
化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿
轴速度分量变化为:
考虑到很小并忽略二阶微量,上式变成:
除以并取极限,便是汽车质心绝对加速度在车辆坐标系上的分量
同理得:
下面计算二自由度汽车的动力学方程
二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为
式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。
考虑到很小,上式可以写成:
下面计算二自由度汽车的动力学方程
二自由度汽车受到的外力沿轴方向的合力与绕质心的力矩和为
式中,,为地面对前后轮的侧向反作用力,即侧偏力;为前轮转角。
考虑到很小,上式可以写成:
汽车前后轮侧偏角与其运动参数有关。
如上图所示,汽车前后轴中点的速度为,;前后轮侧偏角为,;质心侧偏角为,;为与轴的夹角,其值为:
根据坐标系的关系,前后轮侧偏角为
由此,可以列出外力,外力矩与汽车参数的关系式为
所以,二自由度汽车的运动微分方程为
由此,可以列出外力,外力矩与汽车参数的关系式为
所以,二自由度汽车的运动微分方程为
上式可以变形为:
写成状态方程为:
中。