5.3-3线性二自由度汽车模型的动力学分析
- 格式:pdf
- 大小:331.76 KB
- 文档页数:6
汽车二自由度动力学模型
汽车二自由度动力学模型是一种用于描述汽车运动的简化模型。
它考虑了两个自由度,通常是车辆的纵向(前进方向)和侧向(横向)运动。
在这个模型中,车辆被视为一个质量集中的刚体,通过两个自由度来描述其运动状态。
这两个自由度通常是车辆的速度(纵向)和横摆角速度(侧向)。
汽车二自由度动力学模型的建立基于一些基本的物理原理,如牛顿第二定律、动量守恒定律和刚体动力学。
通过对这些原理的应用,可以得到描述车辆运动的微分方程。
这些方程通常包括车辆的加速度、驱动力或制动力、转向力矩以及车辆的惯性参数等。
通过求解这些微分方程,可以预测车辆在不同工况下的运动响应,例如加速、制动、转弯等。
汽车二自由度动力学模型在车辆动力学研究、驾驶模拟器、自动驾驶系统等领域有广泛应用。
它可以帮助工程师和研究人员了解车辆的基本运动特性,评估车辆的操控稳定性、行驶安全性等方面的性能。
然而,需要注意的是,二自由度模型是一种简化的模型,它忽略了许多实际情况中的复杂因素,如悬挂系统、轮胎特性、空气动力学等。
在实际应用中,可能需要使用更复杂的多自由度模型或考虑更多的因素来更准确地描述汽车的运动。
总的来说,汽车二自由度动力学模型提供了一个简单而有用的工具,用于初步研究和理解汽车的运动行为,但在具体应用中,需要根据实际需求进行适当的修正和扩展。
如果你对汽车动力学模型有更深入的问题或需要进一步的讨论,我将很愿意提供帮助。
车辆二自由度模型状态空间方程一、车辆二自由度模型状态空间方程车辆二自由度模型是车辆动力学中常用的简化模型之一,它将车辆简化为一个在平面上运动的质点。
在这个模型中,车辆可以做平面上的平移和转动运动,因此被称为车辆的二自由度模型。
而状态空间方程则是描述这一模型运动规律的数学工具。
在车辆二自由度模型中,通常采用平移运动的位置和速度以及转动运动的姿态角和角速度作为描述车辆状态的变量。
通过对车辆动力学和控制理论的研究,可以得到描述车辆二自由度模型的状态空间方程。
这些方程包括车辆的位置、速度、姿态角和角速度之间的动态关系,可以用来描述车辆在不同行驶状态下的运动规律。
二、深度分析车辆二自由度模型状态空间方程车辆二自由度模型状态空间方程的深度分析需要从车辆动力学和控制理论的角度进行。
我们需要深入了解车辆的平移和转动运动规律,包括车辆在不同速度和转角条件下的运动特性,以及外部环境对车辆运动的影响。
我们需要探讨车辆控制系统对车辆状态的影响,包括如何通过控制输入来影响车辆的运动状态。
我们需要分析车辆二自由度模型状态空间方程的数学推导和物理意义,以深入理解车辆状态空间方程的结构和参数含义。
在具体的分析过程中,我们可以通过建立车辆运动的动力学模型和控制模型,使用数学工具进行模型分析和仿真验证,从而深入理解车辆二自由度模型状态空间方程的动态性质和稳定性。
三、撰写高质量车辆二自由度模型状态空间方程文章基于以上的深度分析,我们可以着手撰写一篇高质量的文章。
我们可以介绍车辆二自由度模型的基本原理和概念,然后逐步展开对车辆状态空间方程的分析和推导,包括车辆运动学和动力学的描述,以及状态空间方程的数学结构和物理意义。
在文章中,我们可以多次提及车辆二自由度模型状态空间方程的关键词,以加强文章的专业性和知识性。
我们还可以结合个人的观点和理解,对车辆二自由度模型状态空间方程进行综合性的总结和回顾,为读者提供全面、深刻和灵活的理解。
一篇关于车辆二自由度模型状态空间方程的高质量文章需要具备深度和广度兼具的分析能力,结合个人观点和实践经验,以及对读者的引导和启发。
二自由度车辆动力学模型一自由度车辆动力学模型和二自由度车辆动力学模型是当前车辆动力学研究的重要部分。
一自由度车辆动力学模型只有一个转动扭矩,而二自由度车辆动力学模型则是加入了驱动车辆惯性转动扭矩和启动车辆非惯性转动扭矩。
在安全驾驶领域,二自由度车辆动力学模型可以更准确地模拟真实车辆的驾驶行为,这在事故分析和行车安全方面具有重要意义。
二自由度车辆动力学模型描述了建立汽车动力学模型所必需的参数,这些参数表征了汽车的运动特性。
根据不同的车辆结构,二自由度车辆动力学模型可以分为简化模型和综合模型,其中简化模型只包括车辆惯性特性和质量结构,而综合模型则需要将不同的惯性项和质量参数、转向设置参数和车轴系数包含在动力学模型中。
二自由度车辆动力学模型的总体模型如下:\begin{matrix}M_{1}\ddot{X}+D_{1}\dot{X}+U_{1}=K*F_{1}+U_{2} \\\M_{2}\ddot{Y}+D_{2}\dot{Y}+U_{3}=F_{2}\end{matrix}其中,$M_1$和$M_2$分别表示横向与纵向的动力质量;$D_1$和$D_2$分别表示横向与纵向的阻尼系数;$U_1$、$U_2$和$U_3$分别表示横向惯性扭矩、横向转动非惯性扭矩和纵向弹性力;$K$表示倾斜系数,用于模拟车轮对地面的抓地力;$F_1$和$F_2$表示制动转动非惯性扭矩和纵向弹性力。
通过二自由度车辆动力学模型可以计算汽车的动态行为,从而分析安全驾驶问题。
此外,这一模型也可以用于驾驶辅助系统的设计和仿真,帮助提高汽车的驾驶安全然而,二自由度车辆动力学模型实际上是基于简化参数建立的,模型参数与真实参数之间会存在一定程度的误差,因此当需要更加精确地模拟车辆行为时,这一模型可能不够准确。
另外,这种模型的可靠性也受到模型参数的设置和计算过程的限制,因此在实际应用中还需要对其进行适当的修正。
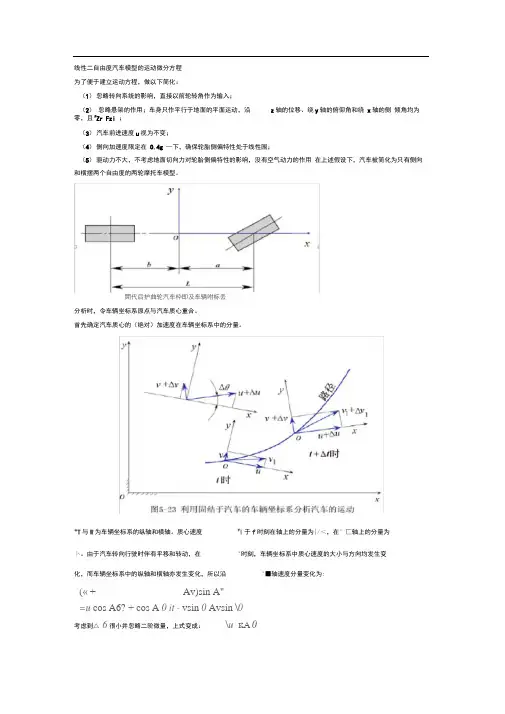
线性二自由度汽车模型的运动微分方程为了便于建立运动方程,做以下简化:(1)忽略转向系统的影响,直接以前轮转角作为输入;(2)忽略悬架的作用;车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且F Zr Fzi ;(3)汽车前进速度u视为不变;(4)侧向加速度限定在0.4g —下,确保轮胎侧偏特性处于线性围;(5)驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮摩托车模型。
閒代后护曲轮汽车枠即及车辆咐标丟分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
"T与W为车辆坐标系的纵轴和横轴。
质心速度V l于f时刻在轴上的分量为|/<,在°匸轴上的分量为卜。
由于汽车转向行驶时伴有平移和转动,在'时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿'■轴速度分量变化为:(« + Av)sin A"=u cos A6? + cos A 0 it -vsin 0 Avsin \0考虑到△ 6很小并忽略二阶微量,上式变成:\u -K A0除以Ar并取极限,便是汽车质心绝对加速度在车辆坐标系\ox上的分量du dO *a -- ----- v——= n-va)x dt dt r同理得:叭"刊叫下面计算二自由度汽车的动力学方程< ------------------------------ --------------------------------------- ih二自由度汽车受到的外力沿匸"|轴方向的合力与绕质心的力矩和为》禺=洛心方"二11式中,如,比为地面对前后轮的侧向反作用力,即侧偏力;/为前轮转角考虑到’很小,上式可以写成:=片碣 + kya z I 工恢=ak l a ]-bk 2a 2\ 下面计算二自由度汽车的动力学方程二自由度汽车受到的外力沿 轴方向的合力与绕质心的力矩和为£幵=F”£OM+尽 11式中,呂|, F 伫为地面对前后轮的侧向反作用力,即侧偏力; 5为前轮转角 考虑到’很小,上式可以写成:*冋+k 2a 2 工虽=昭绚-风耳汽车前后轮侧偏角与其运动参数有关。
基于MATLAB的车辆两自由度操纵稳定性模型及分析汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1二自由度汽车模为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析确定汽车质心的(绝对)加速度在车辆坐标系的分量a a 和a a 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度a 1与t 时刻在Ox 轴上的分量为u ,在oy 轴上的分量为v 。
沿Ox 轴速度分量的变化为:()()cos sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到∆θ很小并忽略二阶微量,上式变成:除以∆t并取极限,便是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为:u x r d d v u v dt dt a θω=-=-同理,汽车质心绝对加速度沿横轴oy 上的分量为:y rv u a ω=+二自由度动力学方程二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为:1212cos a cos YY Y ZY Y b F F FM F Fδδ=+=-∑∑式中,a a 1,a a 2为地面对前后轮的侧向反作用力;δ为前轮转角。
二自由度汽车动力学模型二自由度汽车动力学模型是研究汽车运动的一个重要模型。
本文将对二自由度汽车动力学模型进行详细介绍,并探讨其应用领域和意义。
二自由度汽车动力学模型是指在水平面上考虑汽车的纵向和横向运动时所采用的模型。
它假设汽车在纵向和横向上分别只有一个自由度的运动。
纵向运动主要包括加速度、制动和坡道行驶等,而横向运动主要包括转向、侧向加速度和横向风等。
在二自由度汽车动力学模型中,纵向运动可以用质量、弹簧和减震器来描述。
弹簧和减震器模拟了汽车的悬挂系统,通过控制弹簧和减震器的刚度和阻尼系数,可以调节汽车的纵向运动特性。
而质量则代表了汽车本身的质量,它会影响汽车的加速度和制动性能。
横向运动主要由转向系统和悬挂系统来描述。
转向系统包括转向角和转向力,它们可以通过转向系统的操纵来实现对汽车行驶方向的控制。
悬挂系统包括侧向刚度和侧向阻尼系数,它们可以影响汽车的横向稳定性和侧向加速度。
二自由度汽车动力学模型的应用非常广泛。
首先,它可以用于汽车的设计和优化。
通过对模型进行仿真和分析,可以评估不同设计参数对汽车性能的影响,并找到最佳设计方案。
其次,二自由度汽车动力学模型可以用于汽车动力学研究。
通过对模型进行数值求解和实验验证,可以深入理解汽车运动的本质和规律。
此外,二自由度汽车动力学模型还可以应用于汽车控制系统的设计和优化。
通过对模型进行状态空间建模和控制器设计,可以实现对汽车运动的精确控制。
二自由度汽车动力学模型的研究对于提高汽车性能和安全性具有重要意义。
通过对汽车运动特性的深入研究,可以优化汽车的悬挂系统、转向系统和控制系统,提高汽车的操控性能和驾驶舒适性。
此外,对于自动驾驶技术的发展也有重要意义。
通过对二自由度汽车动力学模型的建立和仿真分析,可以为自动驾驶系统提供精确的参考和决策依据,提高自动驾驶的安全性和稳定性。
二自由度汽车动力学模型是研究汽车运动的重要模型,具有广泛的应用领域和重要意义。
通过对模型的建立和分析,可以深入理解汽车运动的本质和规律,优化汽车的设计和控制,提高汽车性能和安全性。
1构成汽车动力学系统的元件,如轮胎,悬架,转向系等具有非线性特性,描述汽车的微分方程应是非线性微分方程,即汽车为一非线性系统,但是在大多数情况下,汽车的侧向加速度不超过0.4g,若忽略一些次要因素,可把汽车看成一个线性动力学系统。
2汽车的运动是借固结于运动着的汽车上的动坐标系——车辆坐标系来描述的,使坐标的原点与质心重合,与操作稳定性有关的主要运动参数为:车厢角速度在Z轴上的分量——横摆角速度r w,汽车质心速度在Y轴上的分量——侧向速度v,汽车质心加速度在Y轴上的分量——侧向加速度y a。
3对线性二自由度的汽车模型进行分析,忽略那些因素以后,实际上把汽车简化为一个两轮摩托车模型,它由前后两个有侧向弹性的轮胎支撑于地面,具有侧向及横摆运动的二自由度汽车模型。
4通过分析可得汽车的二自由度汽车运动微分方程(具体的在汽车理论书上144-146页,有推导的详细过程)5①汽车的时域响应可分为不随时间变化的稳态响应和随时间变化的瞬态响应,②汽车的等速直线行驶是一种稳态,在其行驶的时,急速转动转向盘至某一转角时,停止转动并维持此转角不变,即给汽车以转向盘角阶跃输入,一段时间后进入等速圆周行驶,这也是一种稳态,称为转向盘角阶跃输入下进入的稳态响应,在等速直线行驶与等速圆周行驶这两个稳态运动之间的过渡过程便是一种瞬态,相应的瞬态运动响应称为转向盘角阶跃输入下的瞬态响应图中是以汽车横摆角速度r w 来描述汽车响应的,给汽车以转向角阶跃输入后,汽车横摆角速度经过一过度过程后达到稳定的横摆角速度ro w ,此过程即为汽车的瞬态响应,然后便进入以row 为角速度的等速圆周运动。
6前轮角阶跃下输入下的横摆角速度瞬态响(具体的计算过程在汽车理论书上153-154页) 7ωr +上式中 020022w S w S B T s++=ξδ试验时,汽车以40km/h 和110km/h 的车速直线行驶,以不小于500°/s 的角速度转动转向盘,通过查找,近代轿车给出的的超调量为0max r w w *100%=112%-165%,反应时间τξξξτ202021]1arctan[----=w Lk muaw到达第一峰值的时间ε为τξεξξ+--=2021]1arctan[w 近代轿车的ε为0.23-0.59s8,图中是一般汽车的参数值,包括汽车质量,车轮半径,质心到前后轴的距离,以后前后轮侧偏刚度,以及绕Z 轴的转动惯量这图是对前面传递函数中需要的一些参数的求解,可求得其横摆角速度r w 波动时的固有频率,阻尼比,0B 等等9这些是对经过控制后所作出图像的要求,包括其超调,反应时间,到达第一峰值的时间,而且使得达到稳定状态的时间尽可能短,使汽车在较短时间内达到稳定10这是不加控制下的simulink 模块,得出它的图像,不符合所要求的条件,所以要通过控制改变其特性11这是30及60度的模块图,这是所添加的PID 控制器,这是输入转角为30度时的模块图及输出的图像,这是60度下的,12通过上图可知,通过PID 控制,在相同的速度下,输入不同的的前轮转角,则会改变图像中的超调量,转角越大,则超调量会越大,而其反应时间,到达第一峰值的时间及进入稳定状态的时间不变。
第12讲 2学时教学目的及要求:通过本次课的学习,使学生了解汽车操纵稳定性的概念和研究方法,系统的频率响应函数掌握轮胎的坐标系,侧偏特性以及结构参数的影响,汽车二自由度模型以及系统的稳态和瞬态特性。
主要内容:第五章汽车的操作稳定性§5-1 概述§5-2 轮胎的侧偏特性§5-3 线性二自由度汽车模型对前轮角输入的响应教学重点:1.操纵稳定性的概念及评价指标2.侧偏力、回正力矩概念及其方向教学难点:二自由度模型,稳态响应的三种类型和表征稳态响应参数教学过程:§5-1概述各种输入——→汽车系统——→响应汽车曲线运动时的瞬态响应:瞬态响应过程中,ωr的基本特点:1、时间上的滞后:τ(反应时间)2、执行上的误差:ωr1(超调量)3、ωr的波动:在ωr0上下波动,反映了转向半径的波动,使转向难以操纵.4、稳定时间:ωr/ωr0稳定在95%--105%的时间σ如果ωr不收敛,则导致汽车侧向滑动或翻车。
§5-2 轮胎的侧偏特性(建模预备知识)一、车轮坐标系车轮平面、X轴(指向前方)、Y轴(指向左方)、z轴(上)二、轮胎的侧偏现象:侧向力,F Y——作用在垂直车轮平面的车轮中心处1、车轮无侧向弹性(刚性车轮):可能有两种情况:⑴F Y≤Fzυ时,车轮与地面无滑动,轮胎运动方向——ua(轮胎本身平面cc的方向)⑵F Y>Fzυ时,车轮与地面有滑动△ua,轮胎运动方向——ua′(ua与△ua的合速度)2、车轮有侧向弹性(弹性车轮):侧偏现象--即使F Y≤Fzυ,行驶方向仍会偏离车轮平面。
⑴车轮静止不滚动:接地印痕长轴线与车轮平面平行,错开△h⑵车轮滚动:1 侧偏角,α:车轮沿着与车轮中心成α的方向滚动。
(α与F Y同方向)2 侧偏力,FY——地面侧向反作用力,FY与F Y大小相等,方向相反。
无侧向弹性时:FY为均布(如图4-4a);有侧向弹性时:印痕从前到后,变形由小到大;FY的分布前小后大(如图4-4b);合力FY作用点向后偏移e(拖距)。
建立系统的动力学方程建立系统的动力学方程的方法:1、牛顿力学:牛顿第二定律;2、分析力学:拉格朗日方程。
以x 、θ为两个变量建立二自由度系统动力学方程;3、影响系数法-张量算法 1、 根据牛顿第二定律,2、 拉格朗日方程,()n ,.....2,1Q i ==∂∂-∂∂i q LqL dt d i i -------------拉格朗日第二类方程 V T L -=,称为拉氏函数,泛函;势能函数:()n q q q V V ,.......,21=;动能函数:()n q q q,.......,T T 21=; 广义坐标()n i i ,.....2,1q =对应的非保守力:()n i ,.....2,1Q i =()n i q L q L dt d ii ,.....2,10==∂∂-∂∂ -------------保守系统的拉氏方程-------------------利用上诉拉氏方程求解-------------------------------------q q 21T T M =;q q 21V T K = )J (mx 21T 22θ += ])l (x k )l -(x [k 21V 222211θθ++=将L=T-V 代入拉氏方程可解的:可见:与牛顿第二定律求得的结果一致。
M q+K q =Q;对保守系统Q=0; ()n i q k qmnj j i j ij,.....2,1Q )(i 1j ==+∑= M =(J0m )K=(2222111122112221l k l k l k l k l k l k k k +--+)q =(θx )M q+K q =Q 和()n i q k qmnj j i j ij,.....2,1Q )(i 1j ==+∑= 有明确的物理意义:弹性恢复力-Kq 、惯性力-M q与保守力Q 平衡。
如张量理论,j i j i k m 、可认为是张量的坐标,j i k 表示:使系统仅产生沿j q 坐标的单位位移时,沿i q 坐标必须施加的外力i Q ,或者说Q 的i 分量在q 的j 分量上的影响量的投影。