捷联惯导_星敏感器组合导航技术研究
- 格式:pdf
- 大小:352.64 KB
- 文档页数:6
硕士学位论文星光/惯性组合导航系统分析与研究 RESEARCH ON STAR/SINS INTEGRATED NA VIGATION SYSTEM司胜营哈尔滨工业大学2010年7月国内图书分类号:V 249.32 学校代码:10213 国际图书分类号:627.3 密级:公开硕士学位论文星光/惯性组合导航系统分析与研究硕士研究生:司胜营导师:王常虹教授申请学位:工学硕士学科、专业:控制理论与控制工程所在单位:控制科学与工程系答辩日期:2010年6月授予学位单位:哈尔滨工业大学Classified Index: V 249.32U.D.C.: 627.3Dissertation for the Master’s Degree in Engineering RESEARCH ON STAR/SINS INTEGRATEDNA VIGATION SYSTEMCandidate:Si ShengyingSupervisor:Prof. Wang ChanghongAcademic Degree Applied for:Master of EngineeringSpeciality:Control Theory and ControlEngineeringAffiliation:Dept. of Control Scienceand EngineeringDate of Defence:Juny, 2010Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文- I -摘要在现代导航系统中,捷联惯性导航系统因具有自主性强、隐蔽性好、数据更新率高、宽频带和信息全面等优点,被广泛应用于各个领域。
但是由于惯性测量元件误差随着时间累积,所以在长时间连续工作的条件下,惯性导航系统的导航精度会随着时间延长而降低。
星敏感器是目前应用最广泛的星载姿态敏感器,虽然数据更新率较低,但是其具有指向精度高、无姿态积累误差等优良特性。
星敏感器基本原理及研究现状与发展趋势0 引言星敏感器是以恒星为参照系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力,具有重要的应用价值。
星敏感器的研究发展与应用已历经半个多世纪,随着新材料,新器件的出现和工艺技术的进步,精度提高,功耗减小,成本降低,应用领域日益广泛的新型星敏感器不断推出。
因此,及时收集整理分析比较国外星敏感器的信息,有利于国内有关姿态测量控制技术的发展。
1 星敏感器研究现状1.1 应用于卫星等空间飞行器的星敏感器星敏感器空间适用性好,且成本较高,因此传统上多用于卫星等空间飞行器的定姿。
1.1.1 基于CCD图像传感器的星敏感器电荷耦合器件(CCD)体积小,重量轻,功耗低,耐冲击,可靠性高,像元尺寸及位置固定,对磁场不敏感,适合空间应用需要,自70年代中期美国率先研发出基于CCD的星敏感器后,一直作为主流的图像传感器应用于星敏感器。
(1)德国Jena-Optronik 的ASTRO 系列该公司的第一款星敏感器是ASTRO 1,1984 年研制,1989年应用于MIR(和平)空间站上。
其后的ASTRO 5是全自主星敏感器,重量轻、功耗小、价格便宜,但横滚轴精度较差,需要两枚同时工作以提高精度。
ASTRO 10 为分体式结构,电子模块与光敏模块分离,主要应用于近地轨道的各类卫星(SAR-Lupe,TerraSAR,DARPA’s Orbital Express,我国的HJ-1 与FY-3等)。
ASTRO 10 集高精度低功耗低重量低成本等优点于一身,是全自主式星敏感器。
主要特点是:内置星表,无须先验知识定姿,遮光罩的遮光角可以自定。
自主温控或者由飞行器控制。
电子模块和敏感器头部相互独立,依靠电缆连接,便于在飞行器上的安装与调整。
电子接口可选。
捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2016-9前言近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃发展,越来越多的高校学生、爱好者和工程技术人员加入到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法基本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后能够对捷联惯导算法有个系统而深入的理解,并能快速而有效地将基本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多宝贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技有限公司:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正.作者2016年9月目录第1章概述 (6)1.1捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算基础 (10)2。
1反对称阵及其矩阵指数函数 (10)2。
1。
1 反对称阵 (10)2。
1.2 反对称阵的矩阵指数函数 (12)2。
2方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2。
捷联惯性技术的发展及与平台惯导系统的对比捷联惯性技术是指利用惯性敏感器(通常使用加速度计和陀螺仪)来测量载体相对于惯性参考系的角速度和加速度,从而计算得到载体的姿态、速度和位置等参数的技术。
捷联惯性技术具有体积小、重量轻、可靠性高、成本低等优点,因此在军事、航空、航海等领域得到了广泛应用。
捷联惯性技术的发展可以追溯到20世纪60年代,当时美国国防部高级研究计划局(DARPA)开始资助一些研究项目,以探索将惯性敏感器直接固定在载体上的可能性。
随着微电子技术和制造工艺的不断发展,捷联惯性技术的性能得到了大幅提升,同时成本也得到了降低。
在捷联惯性技术的发展过程中,出现了多种不同的技术路线。
其中,卡尔曼滤波器是一种被广泛应用于捷联惯性系统的数据处理方法。
卡尔曼滤波器是一种最优估计方法,它能够利用观测数据和预测模型来估计系统的状态,同时考虑到观测噪声和模型误差。
在捷联惯性系统中,卡尔曼滤波器可以用于融合加速度计和陀螺仪的测量数据,以提高系统的性能和精度。
平台惯导系统是一种基于平台稳定性的惯性导航系统。
它通过将惯性敏感器安装在稳定的平台上,可以大大提高系统的精度和可靠性。
平台惯导系统通常由平台、惯性敏感器、控制系统和数据处理系统等组成。
其中,平台是整个系统的支撑结构,惯性敏感器用于测量载体的角速度和加速度,控制系统用于控制平台的运动轨迹,数据处理系统则用于对测量数据进行处理,得到载体的姿态、速度和位置等参数。
与捷联惯性技术相比,平台惯导系统具有更高的精度和可靠性。
这是因为在平台惯导系统中,惯性敏感器可以安装在稳定的平台上,从而消除了载体运动对测量数据的影响。
此外,平台惯导系统还可以通过控制系统来实现主动减震,以进一步提高系统的性能和精度。
然而,平台惯导系统也存在一些缺点。
首先,它的体积和重量较大,不利于小型化和轻量化。
其次,它的成本较高,不利于大规模应用。
最后,它的维护和校准难度较大,需要专业人员和技术支持。
1 绪论随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。
于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。
惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1]1.1 捷联惯导系统工作原理及特点惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。
惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。
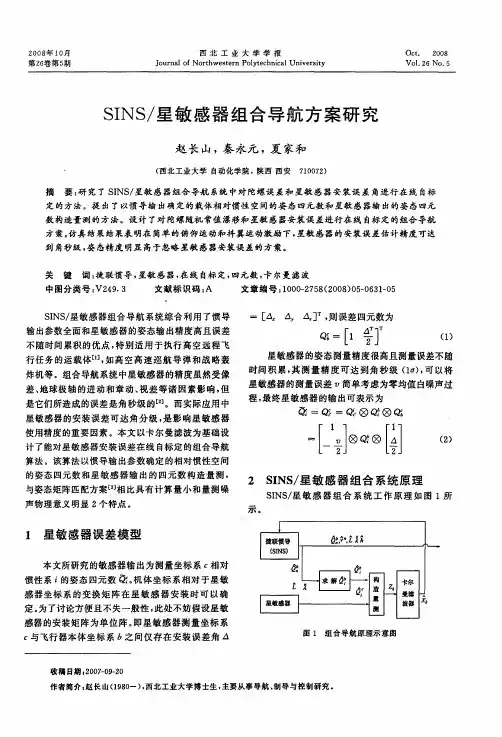
SINS CNS组合模式研究摘要:给出常用天文/惯性组合导航系统的工作方式。
全捷联方式下,探讨SINS/CNS系统的三种组合模式。
介绍各组合模式的原理,基于最优估计的组合模式,无推导给出系统状态方程和量测方程,对各自特点进行分析总结。
关键词:SINS/CNS组合导航最优估计组合模式1 工作模式天文/惯性组合导航系统有多种工作模式,按惯性器件和星敏感器安装方式[1]的不同,分为三种:全平台模式,采用平台式惯导,星敏感器装于惯导平台。
其特点是星敏感器工作在相对静态环境中,测星精度较高。
但因星敏感器安装在平台上,使平台结构设计困难,且信息输入、输出方式及驱动电路亦较复杂。
惯导平台与星敏感器捷联模式,采用惯导平台,星敏感器采用捷联方式装在载体上。
从未来发展趋势看,全捷联工作模式的组合导航系统更有发展前景,以下组合模式主要以全捷联式组合方式分别介绍。
2 天文/捷联惯导组合模式组合导航系统的组合模式主要涉及状态变量与量测变量的选取,捷联惯性导航系统误差模型的推导与状态方程的建立,量测方程的建立。
不同的组合模式,其组合导航系统的敛散性和导航精度也会不同。
2.1 简单组合模式惯导系统独立工作,提供姿态、速度、位置等导航数据;天文导航系统解算天文位置和姿态,对惯导系统的位置和姿态进行校正。
该模式是最简单最成熟的,在国内外己得到广泛应用。
2.2 基于姿态误差最优估计的组合模式该模式采用天文导航系统的量测信息,通过最优估计的方法来精确补偿陀螺漂移。
原理是精确提供航行载体坐标系相对惯性系的高精度姿态信息。
因此星敏感器就相当于没有漂移的陀螺,可以用天文量测信息修正惯性器件误差。
3 结语文中探讨了几种常用的SINS/CNS组合模式。
简单组合模式下,两个子系统相对独立,构建容易。
在已装备惯导的条件下,当需要利用天导信息来短期提高惯导精度时,可以考虑采用此组合模式。
模式2直接利用天导输出的惯性姿态与惯导输出的姿态之间的差值作为量测,来估计陀螺仪漂移,并对惯导陀螺仪进行修正;将天导输出的水平姿态与惯导输出的水平姿态之间差值作为水平姿态失准角,利用加速度计和水平姿态失准角之间的线性关系,直接获得加速度计的常值偏置,并对其补偿。
组合导航系统综合设计总结报告姓名:030810521 金鹏030810523 卞晓永030810511 毛槿健班级:0308105日期:2011/11/29一、引言...............................................1.1陀螺和加表的发展概况...................................................1.2 GPS的发展概况.........................................................1.3 捷联惯导的现状 ........................................................二、组合导航原理........................................2.1 组合导航的工作原理 ....................................................2.2 INS/GPS组合模式分析...................................................三、组合导航综合设计....................................3.1IMU误差建模及补偿......................................................3.2GPS信息提取............................................................3.3组合导航结果分析.......................................................四、小结与体会 .........................................一、引言、1.1陀螺和加表的发展概况惯性导航系统是一种自主式导航系统,自问世以来,广泛应用在航海、航空、航天和军事等领域中;陀螺仪作为一种重要的惯性敏感器,是构成INS的基础核心器件,INS的性能在很大程度上取决于陀螺仪的性能。